
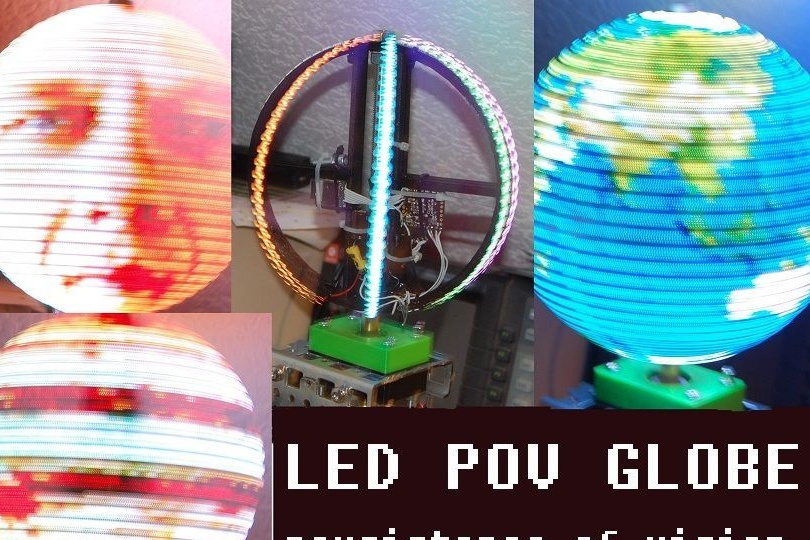
Acest tutorial este despre cum să construiți un glob POV cu mai puțin. electronic componente decât alte dispozitive similare. Prin utilizarea LED-urilor RGB cu un controler integrat APA102. Acest lucru vă va economisi lipirea a numeroase fire. Puteți citi mai multe despre ele. Aceste LED-uri nu au nevoie de un driver suplimentar. Sunt conectate direct la microcontroler în două moduri. Acest lucru vă permite să comutați LED-urile foarte rapid. Pentru a obține o imagine stabilă, sincronizarea SPI are o frecvență de 10 MHz. Un alt plus al acestui design este utilizarea unei carduri flash, care stochează imaginea în format BMP.
1 Materiale necesare

Pentru axa globului, veți avea nevoie de:

1. Știft cu fir M8 și lungime de 250 mm
2. Nuci M8
3. Manșon de alamă de 10 mm și lungime de 100 mm
4. Șaibe de plastic de 8 mm 2 bucăți (fișiere STL incluse)
5. cuplaj pentru cei care vor folosi motorul pas cu pas NEMA 17
Pentru a alimenta inelul LED pe arbore, va trebui
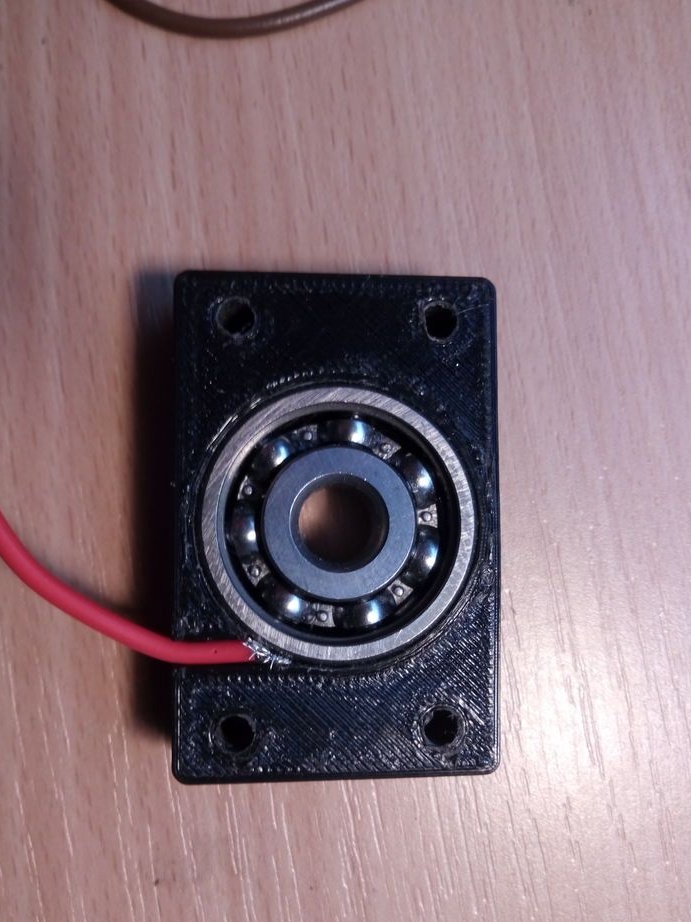
1. rulment cu bile 6300 (10x35x11)
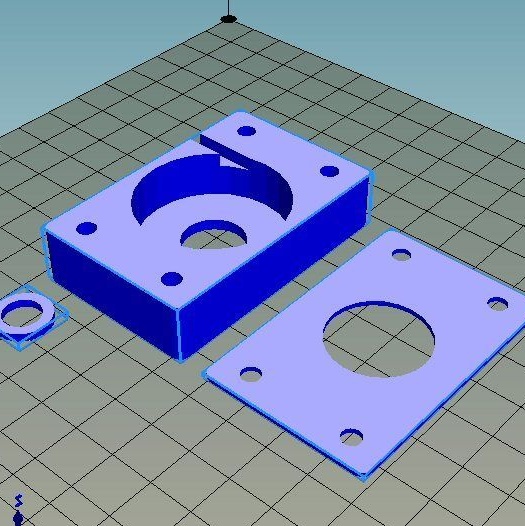
2. două paranteze pentru rulmenți. Tipărit pe o imprimantă 3d sau din lemn.
3. Patru șuruburi M4x40 cu piulițe
4. Sfaturi pentru fire 2 buc 8mm
5. cu diametrul arborelui de 5mm
6. 4 șuruburi M4 pentru montarea motorului
7. poate un fan al lui.
În mod alternativ, puteți utiliza orice motor cu cuplul și controlul de turație potrivite. Motorul utilizat în acest proiect are un cuplu maxim la un curent de 50A, dar consumul maxim de curent în timpul funcționării este de numai 18A.
Pentru a controla șoferul servomotorului, utilizați
1.
2. două butoane
Alimentare 12V pentru motor și 5V pentru LED-uri. Ca sursă de alimentare, puteți utiliza vechea unitate de la PC. Puteți cumpăra o sursă de alimentare 12v / 5A și vă puteți conecta la aceasta
Pentru inelul LED veți avea nevoie de:
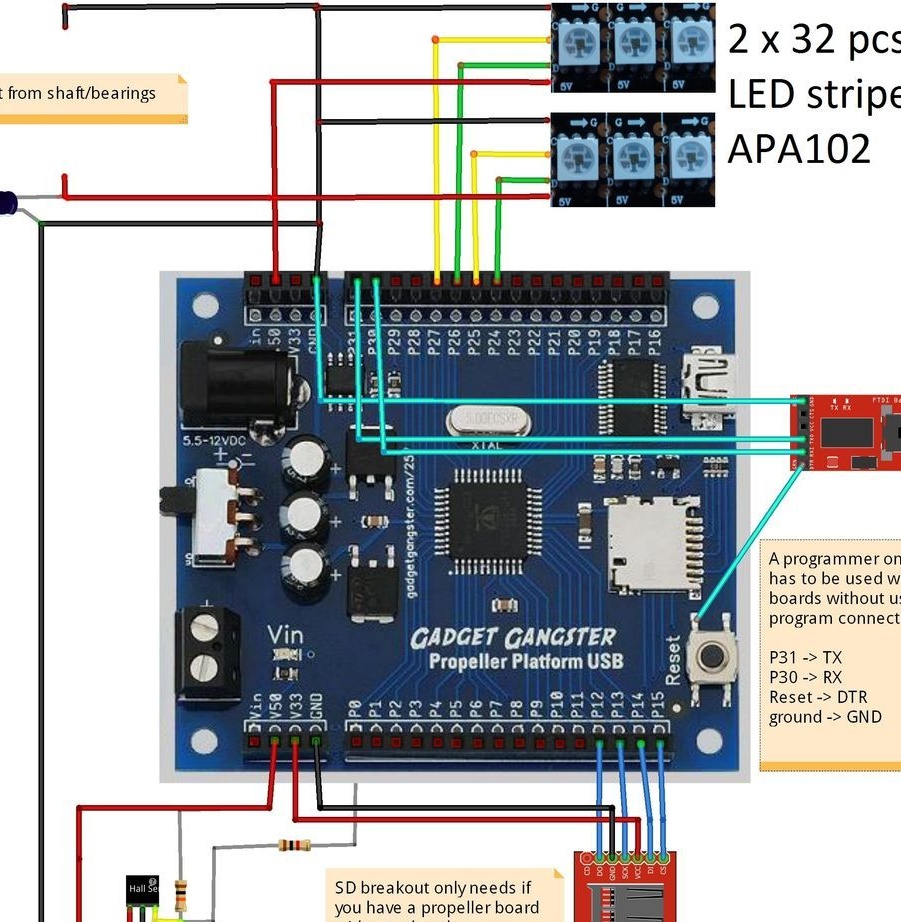
1.664 LED-uri 2 benzi de 32 de bucăți
2. Capacitor 1000 uF 10V
3. Senzor și magnet
4. Rezistența de tragere 1k, 10k
5. Inelul trebuie să fie tipărit pe o imprimantă 3D sau să folosească o bucată de țeavă din PVC
6. Legături din plastic (100 mm)
7. Un lipici bun care se lipește și nu zboară la 2500 rpm
Veți avea, de asemenea, nevoie de un Microcontroller pentru elice Parallax. Sau puteți folosi altul modelul controlor, dar în plus, luați o taxă pentru. Acest controler este programat și clipește la fel de simplu Arduino. Veți avea nevoie de un adaptor USB-TTL pentru a programa ambele controlere.
Locuințe.
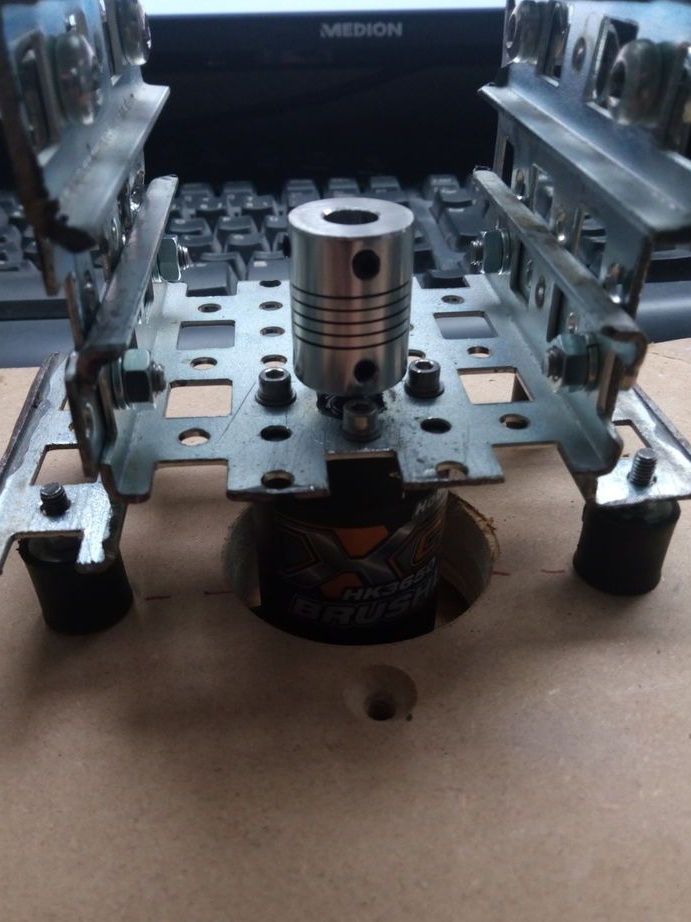
Locuință pentru de casă Puteți lua orice destul de greu. Cel mai important este că puteți fixa în siguranță motorul și rulmenții.
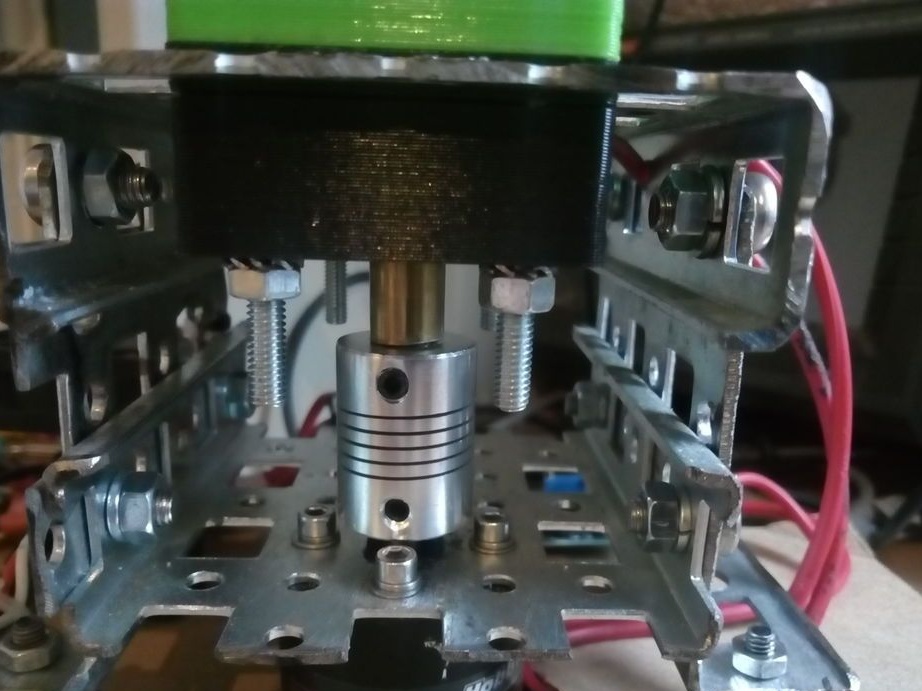
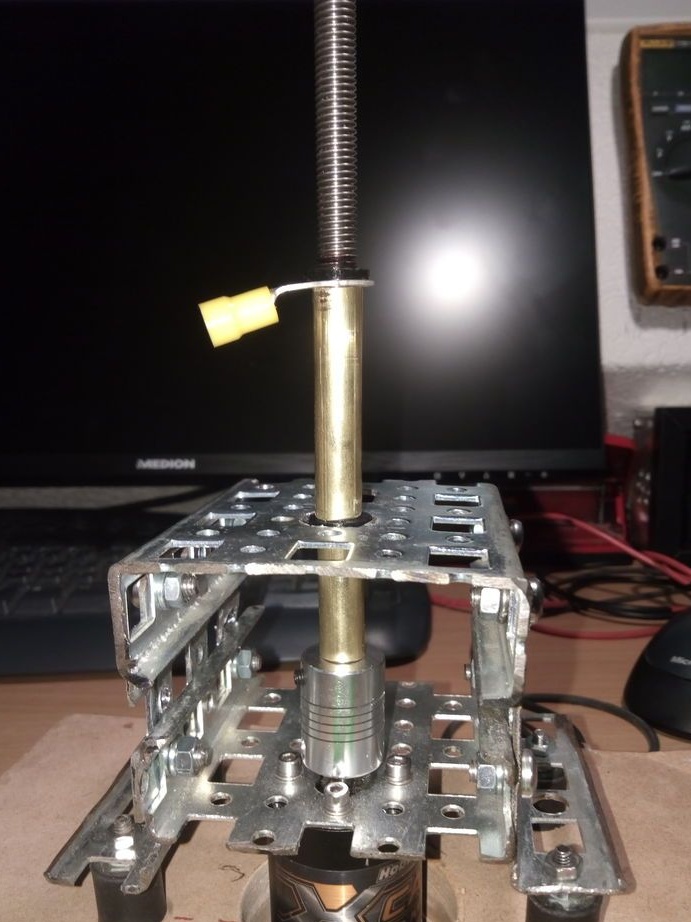
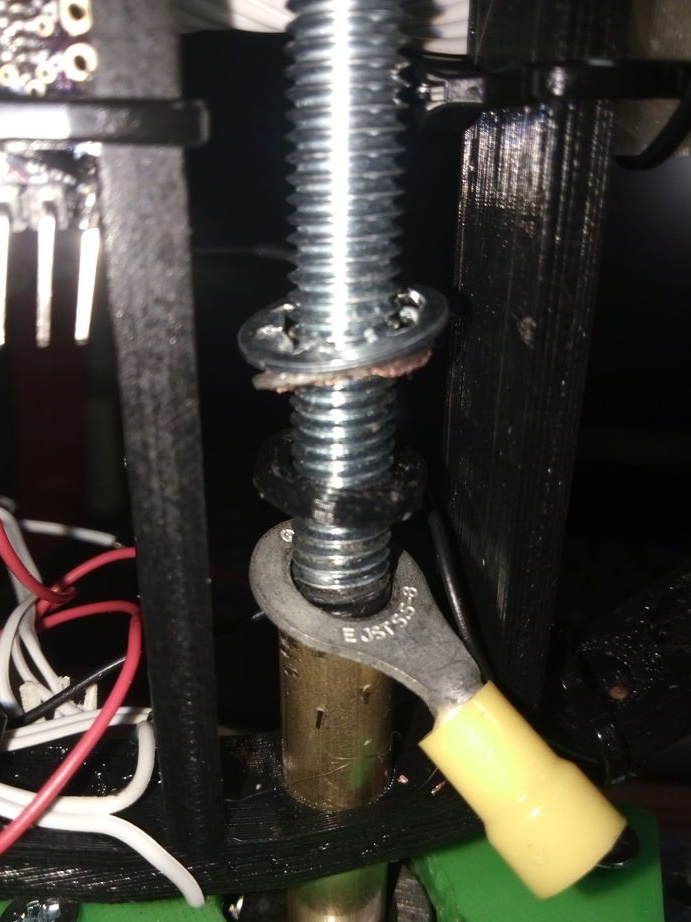
Pentru arborele de antrenare se utilizează un știft lung de 250 mm.Lungimea bucșilor de aramă este de 50 și 30 mm. Depinde de mărimea inelului și de lungimea arborelui. Mâneca superioară și mai lungă trebuie izolată de priză, deoarece este utilizată pentru a furniza plus energie la LED-uri. Pentru a face acest lucru, înfășurați bandă electrică pe un ac de păr sau folosiți termocontractiv, vor fi, de asemenea, necesare două șaibe de plastic. Manșonul va trebui să fie găurit până la 8,5-9 mm, altfel nu se va potrivi. Celălalt mânec împreună cu tijă formează un contact negativ.
Puterea minus este plasată într-o canelură specială și presată pe rulmentul din suport, care poate fi imprimat pe o imprimantă. Fișier braț STL în arhivă.


Acum trebuie să conectați motorul electric, așa cum se arată în diagramă.
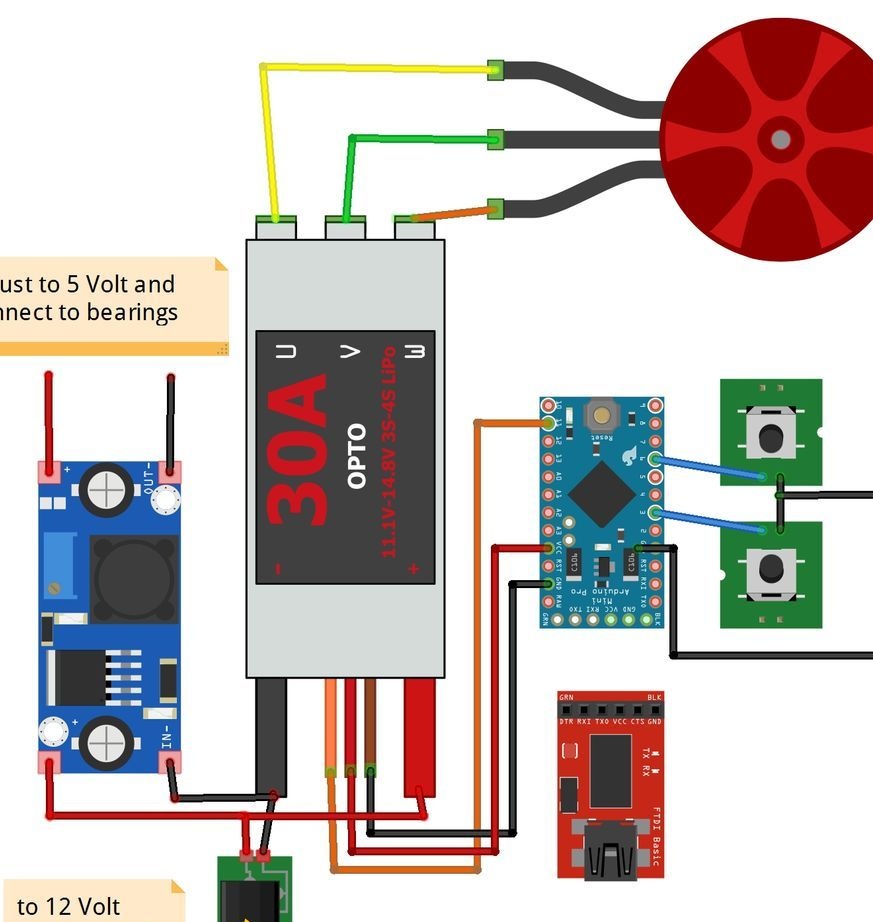
Două butoane de pe diagramă sunt utilizate pentru a regla viteza. Când porniți alimentarea, ESC va primi o valoare de 500 μs. Apăsați unul dintre butoane pentru a porni motorul. Schița va lua valoarea „StartPos = 625”. Mai târziu, atunci când reglați viteza, această valoare poate fi modificată. Apăsați butonul timp de două secunde și motorul ar trebui să se oprească.
Asamblarea structurii de bază.
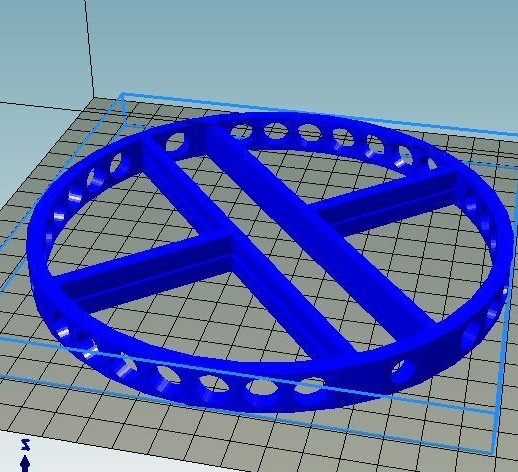

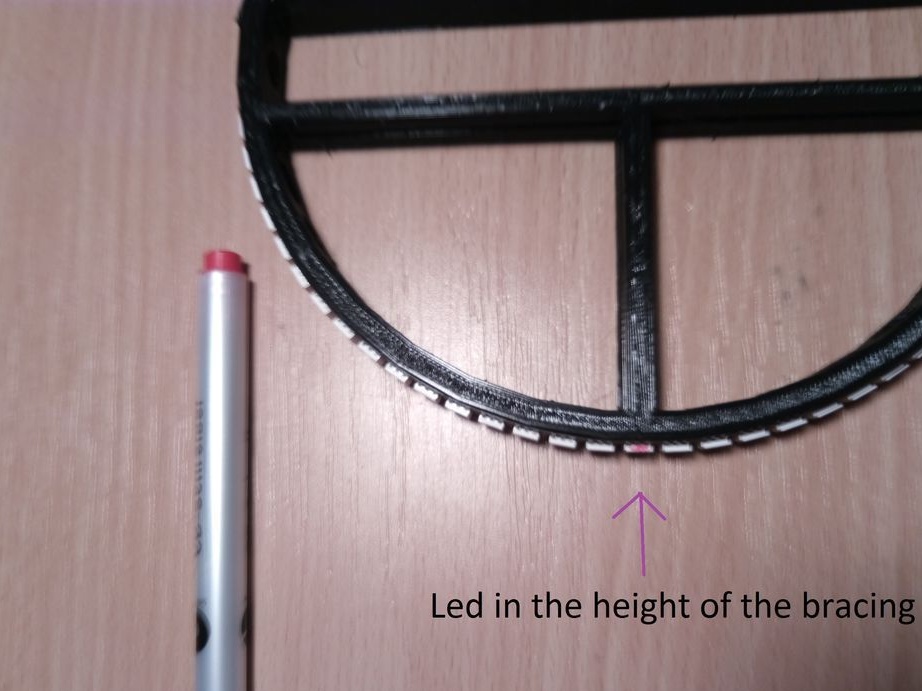
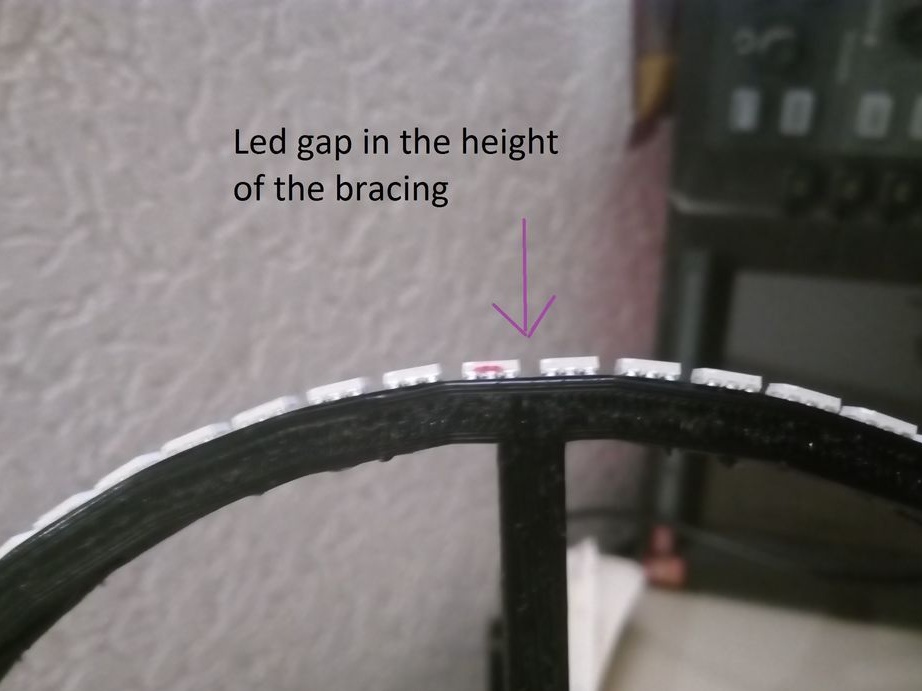


Pentru a face acest lucru, imprimați inelul propriu din fișierul atașat. Autorul a făcut multe găuri pentru a reduce greutatea. Puteți folosi o bucată de țeavă din PVC. Două benzi de 32 de LED-uri sunt tăiate. Două benzi de LED-uri formează linii uniforme și impare. Aranjați benzile astfel încât ledurile dintr-o bandă să fie situate între ledurile celeilalte, dar din spate. După ce fixați banda, puteți conecta ledurile plăcii de control. Și atunci trebuie să echilibrezi întregul ansamblu.
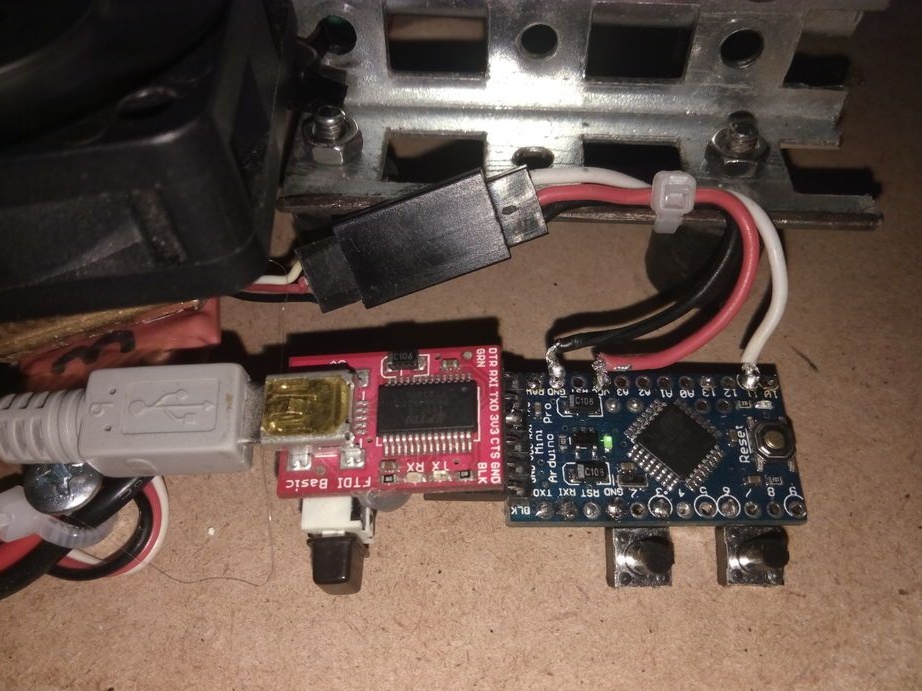
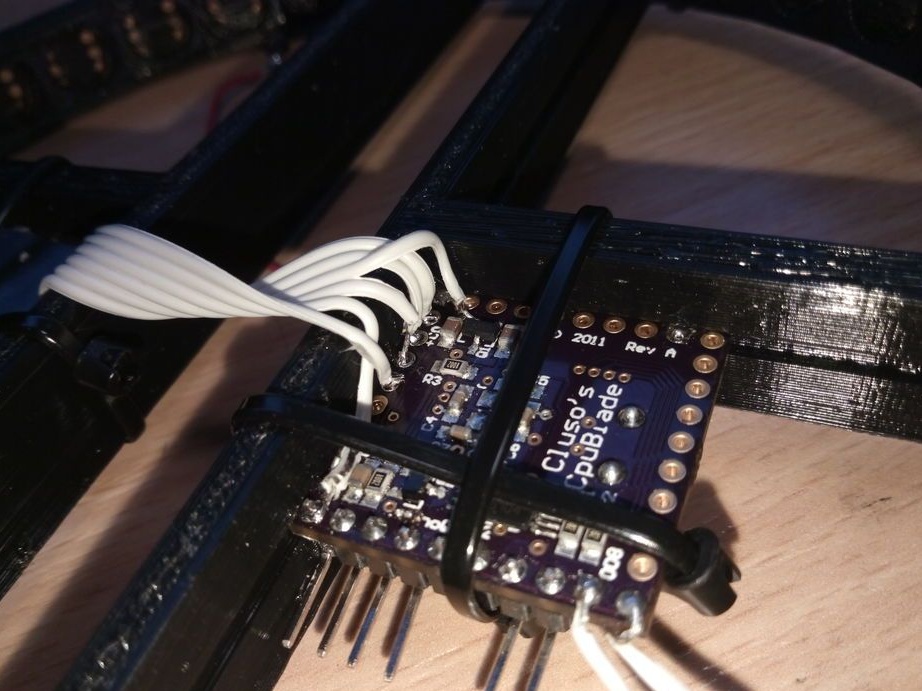
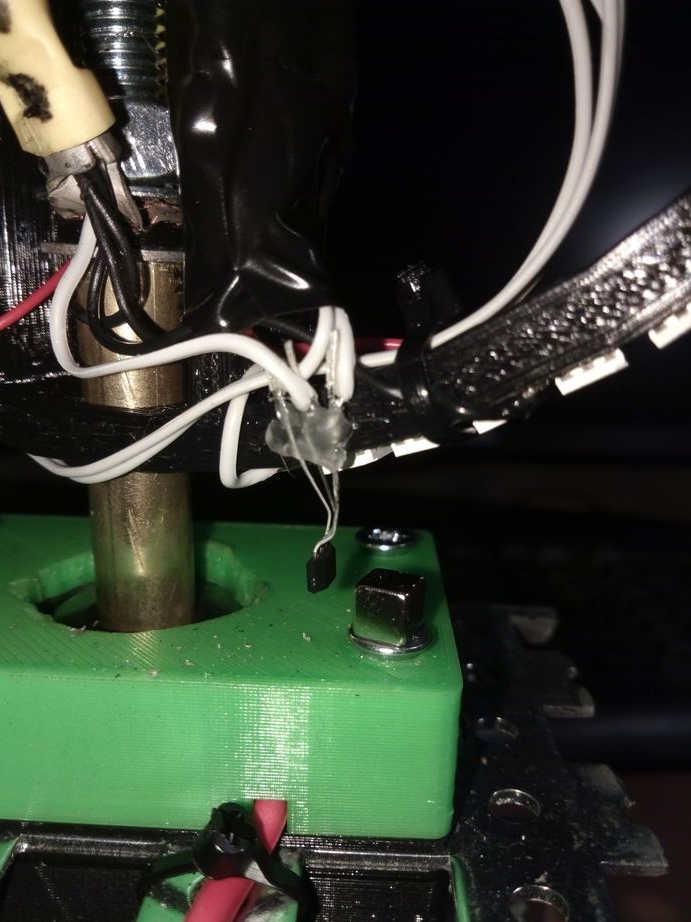
Următoarele fotografii arată cum puteți conecta toate componentele dispozitivului împreună. Fotografia arată, de asemenea, senzorul de hol instalat cu un magnet.
Pentru a programa Parallax Propeller Microcontroller aveți nevoie
NU conectați echipamentul la un port USB sau serial decât după instalarea software-ului. Mai multe detalii despre încărcarea firmware-ului în Parallax pot fi găsite
Autorul folosește o placă MCU mai veche și, în consecință, mai puțin economică, în ceea ce privește consumul de energie, deoarece nu poate găsi noi biblioteci pe noile plăci de control.
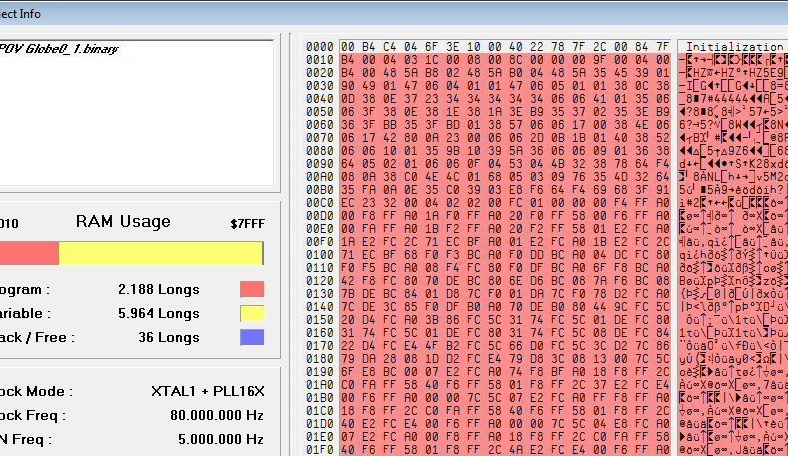
După ce colectați și conectați totul, trebuie să programați controlorul. Autorul face acest lucru cu ajutor. Fișiere cu firmware în arhivă.
Acum puteți încerca să porniți dispozitivul. De la început, copiați imaginea de testare pe cardul SD și lipiți-o în slot.
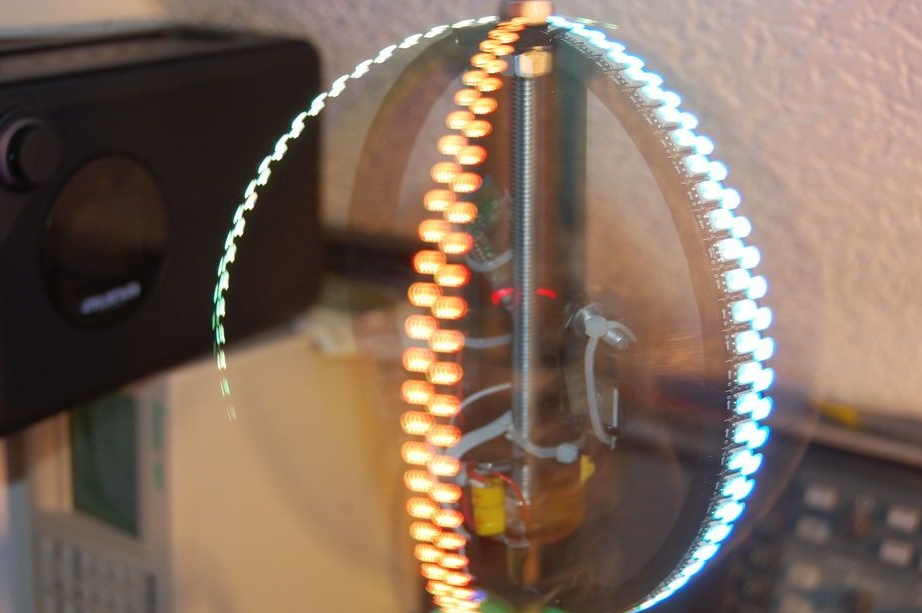
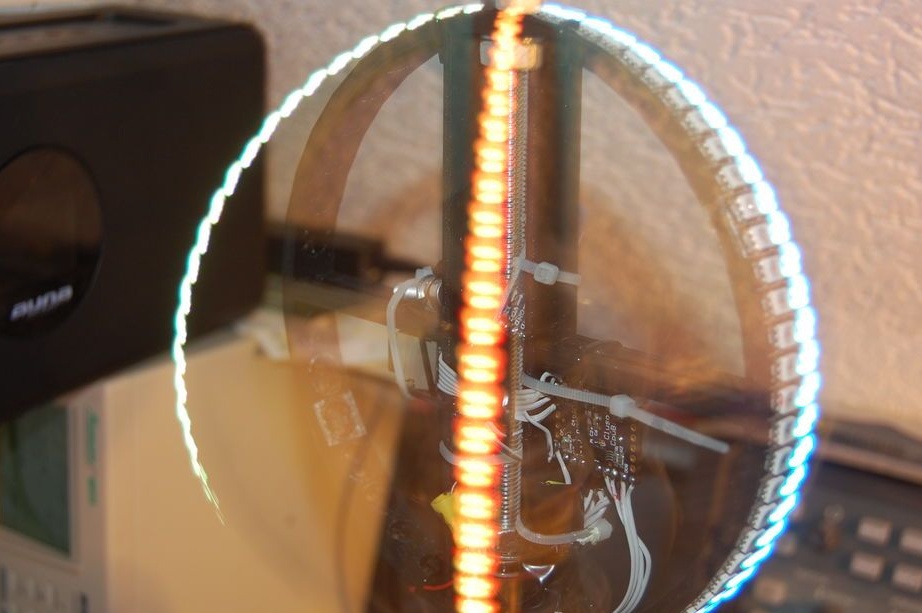
• Dacă rotiți inelul cu mâna, ledurile ar trebui să clipească de fiecare dată când senzorul de hol trece prin magnet
• Porniți motorul. Creșterea vitezei cu ajutorul butoanelor, este necesar să vă asigurați că LED-urile se aprind așa cum se arată în 2 fotografii
• Conectați borna Arduino la regulatorul motorului.
• Amintiți-vă de valoarea afișată.
• Opriți motorul
• Scrieți valoarea stocată anterior pe variabilă „startPos„schița POV_MotorControl
• Programează din nou Arduino.
Data viitoare când motorul pornește imediat cu viteza corectă. Acum puteți „Completa” pe hartă orice imagine. Pentru a face acest lucru, trebuie să redimensionați imaginea cu 120x64 pixeli, rotiți imaginea în sens invers acelor de ceasornic cu 90 de grade și oglindeți vertical. Reduceți luminozitatea imaginii, deoarece LED-urile sunt foarte luminoase. Pentru a face acest lucru, este mai bine să utilizați corecția gamma cu un coeficient de 0,45.
Salvați imaginea ca BPM 24 biți fără compresie. După toate manipulările, fișierul de ieșire va fi dimensiunea 23094 byte.



