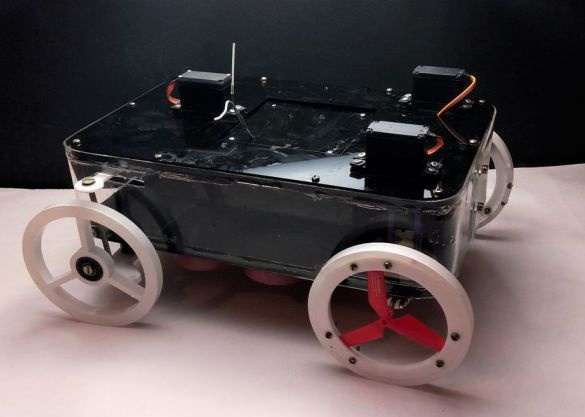



În acest articol, vom lua în considerare fabricarea de către meșteri indieni a unui vehicul pe tot terenul care se deplasează atât pe uscat, cât și pe apă. Toate vehiculele de teren constă dintr-o platformă plutitoare cu roți și elice. Mecanismele sunt controlate prin telecomandă prin intermediul Arduino ONU.
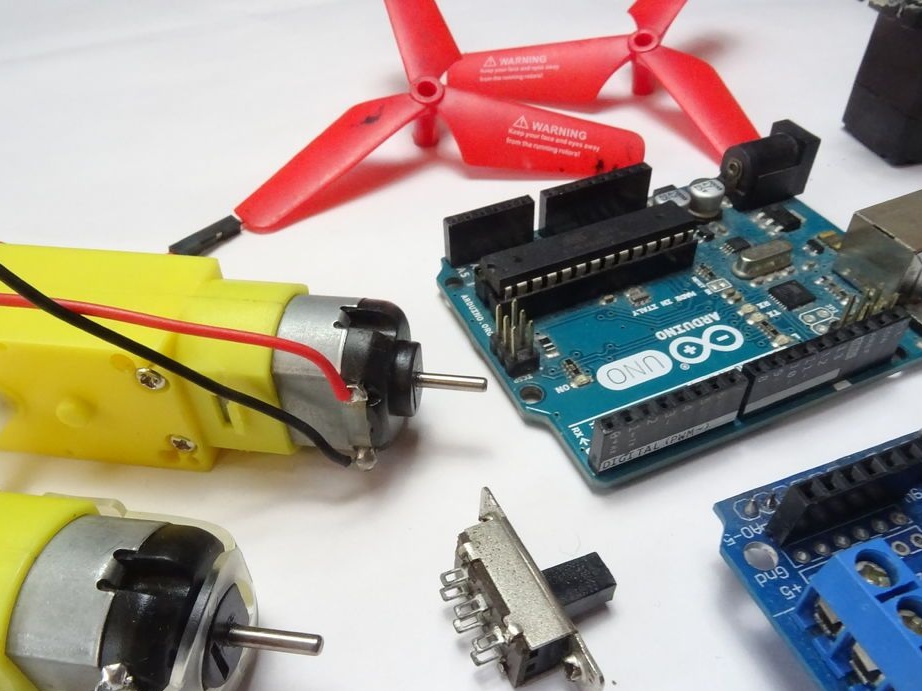
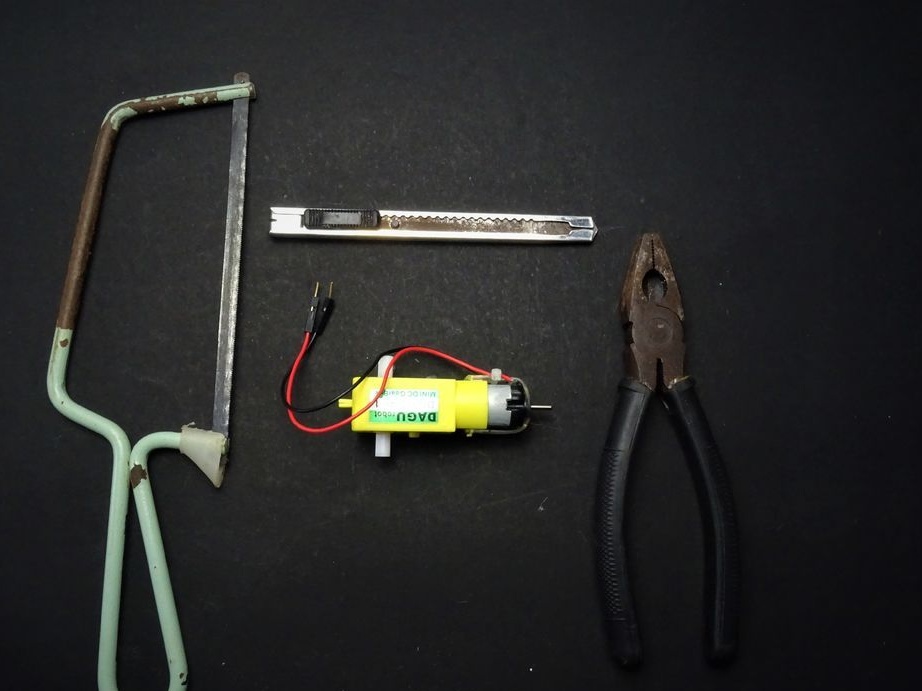
Instrumente și materiale:
-
-AKB 9V;
-Vyklyuchatel;
-Akril;
-Fanera;
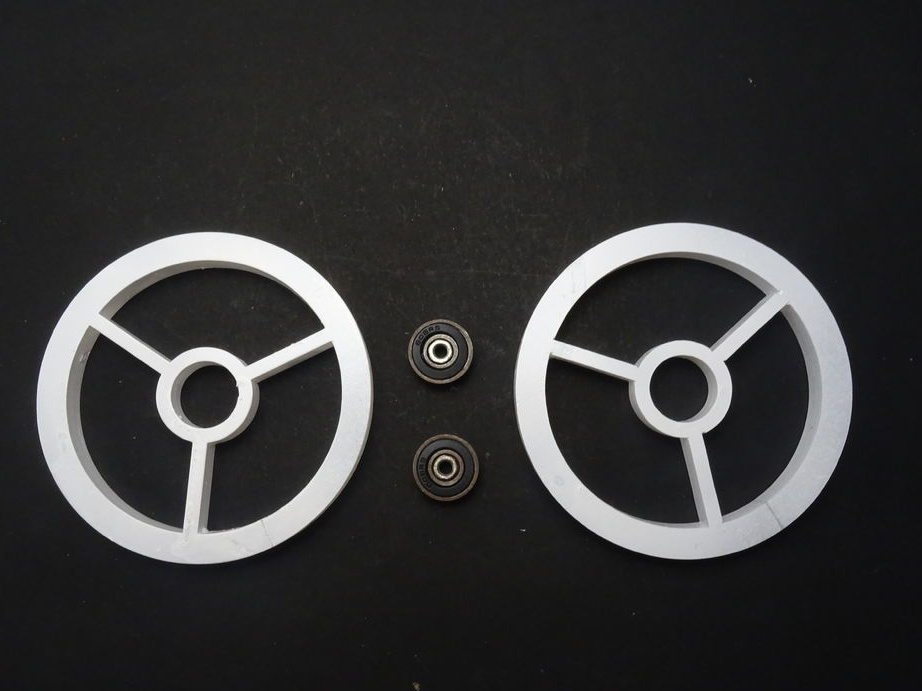
(prin referință, rulmentul este 8 x 16 x 5 mm, autorul indică 8 * 22 mm)
-Doua elice;
-Krepezh;
-Poplavki;
-Pistol de luciu;
-Super superioară;
Rasina epoxidica;
-Fier de vânzare;
-Drel;
-Lasier pentru taiere;
-Pila;
- surubelnita;
-Drel;
-Fier de vânzare;
A-placi;
-Computer cu software;


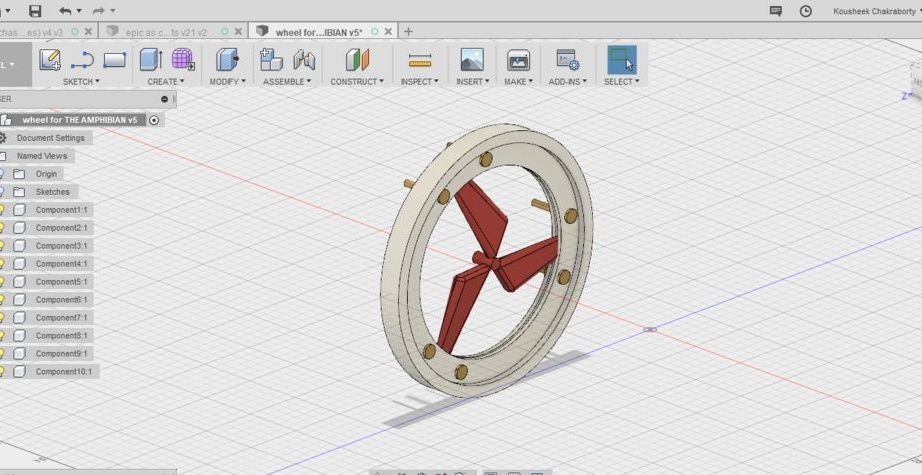
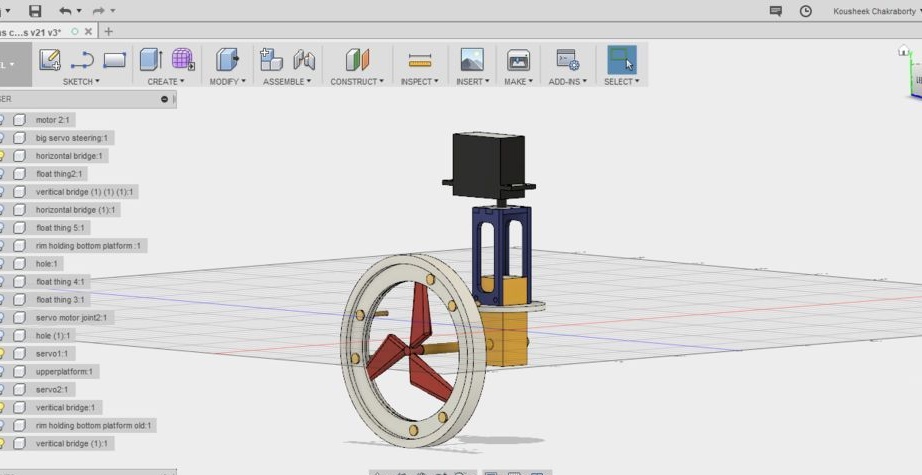
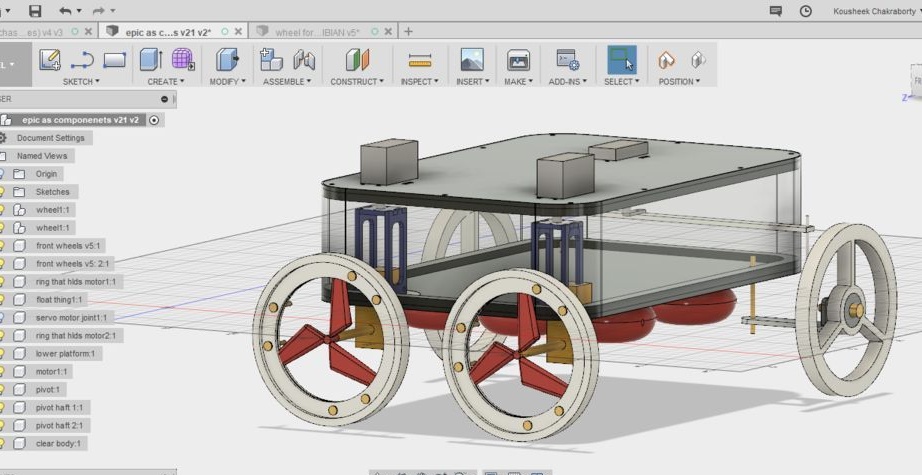
Pasul 1: Proiectare
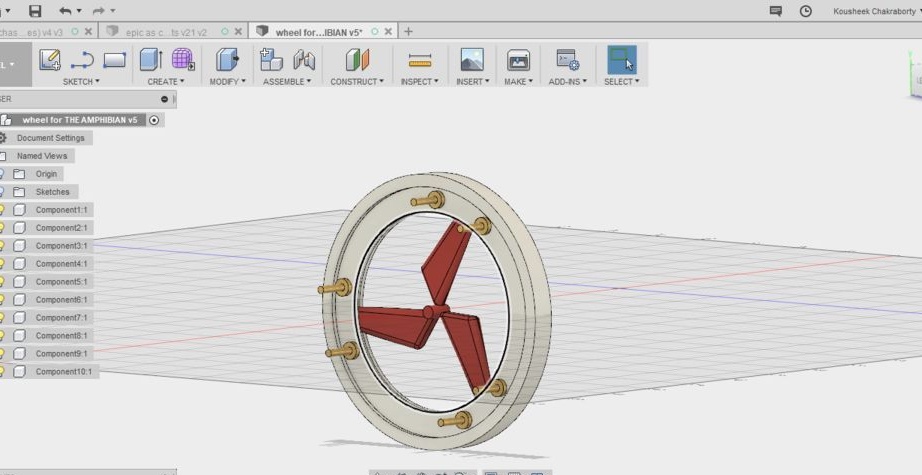
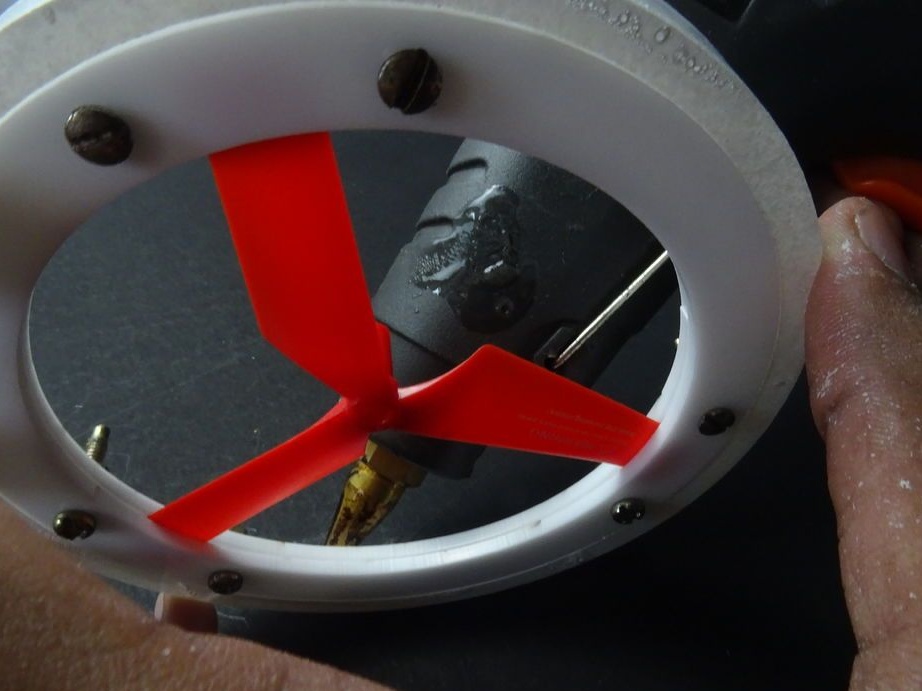
Pentru a crea proiectul, maeștrii au folosit programul Fusion 360. Întreaga dificultate a fost combinarea mișcării pe uscat și în apă. La proiectarea roților, stăpânii au dezvoltat un sistem în care șuruburile se vor deschide în apă, dar, având în vedere complexitatea proiectării, au integrat pur și simplu elicele din jucăria copiilor din interiorul roții. Acest lucru permite roților să mute vehiculul pe tot terenul, iar la intrarea în apă, șuruburile sunt pornite.
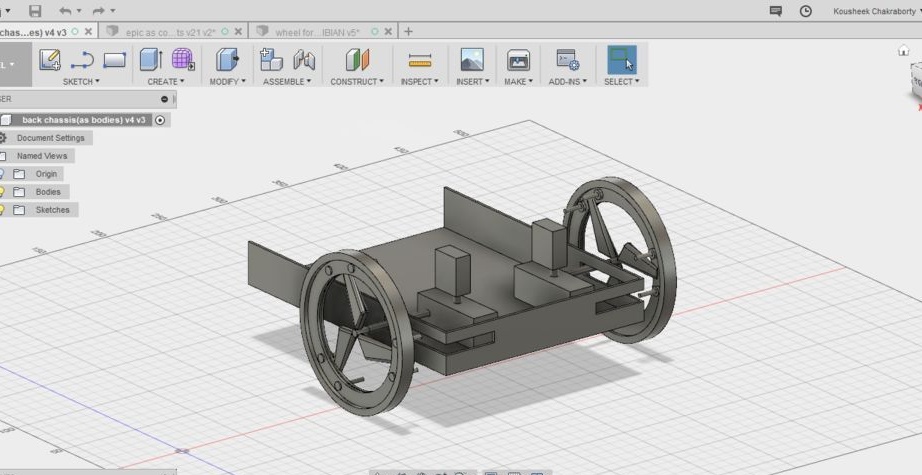
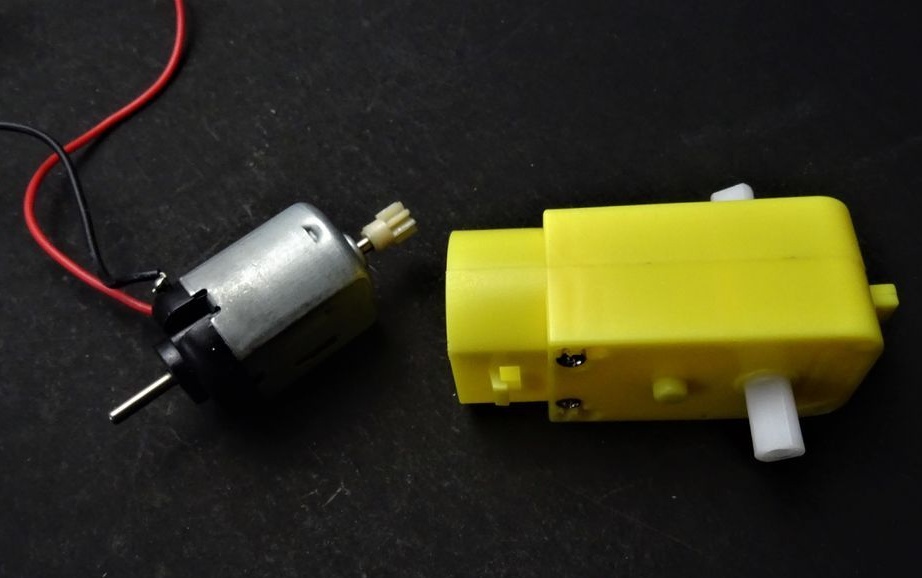
Pentru a pune în aplicare această idee, trebuie să puteți roti roțile din spate perpendiculare pe vehiculul pe tot terenul atunci când conduceți pe apă. Acest lucru a devenit posibil când angrenajele motorului au fost scoase din cadru. Cutii de viteze din plastic și apa care intră în ele nu vor dăuna.
Rotirea șuruburilor pe roți va fi efectuată cu ajutorul unui servomotor.
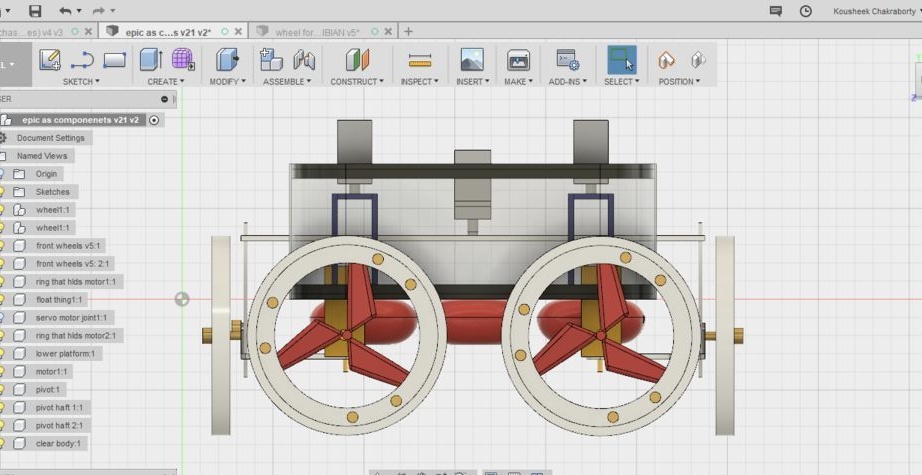
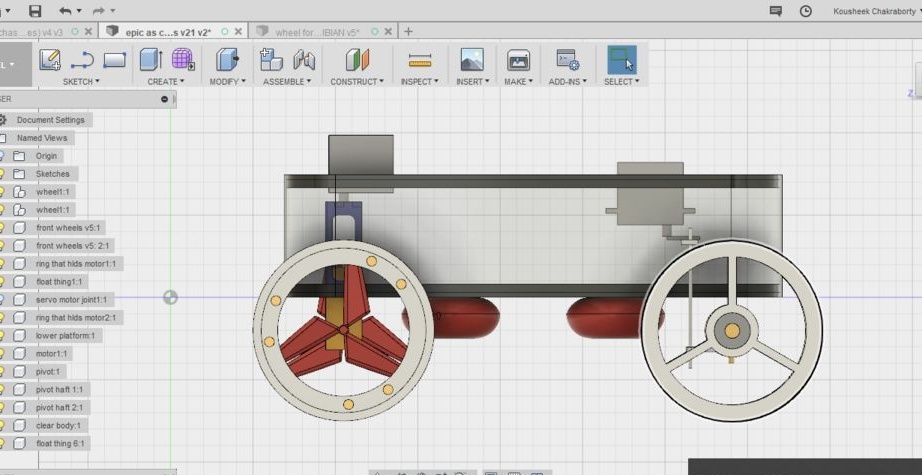
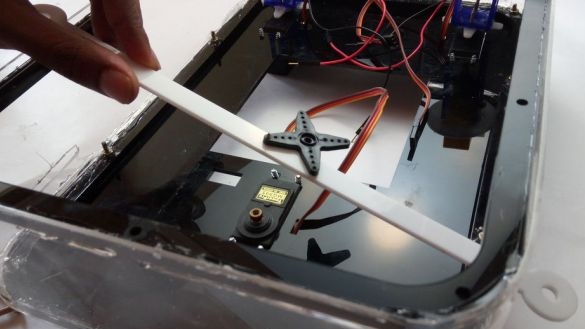
Vehiculul cu toate tipurile de teren are două mecanisme de rotire. Una pentru a controla roțile din spate ale elicelor în apă, iar a doua, pentru a conduce pe uscat, controlează roțile din față. Unghiul de rotație al roților din față este de 35 de grade, ceea ce vă permite să faceți viraje ascuțite.
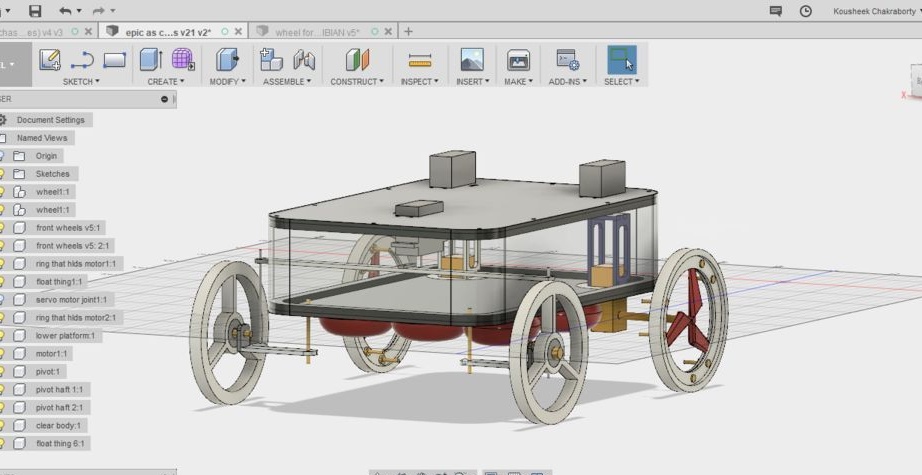
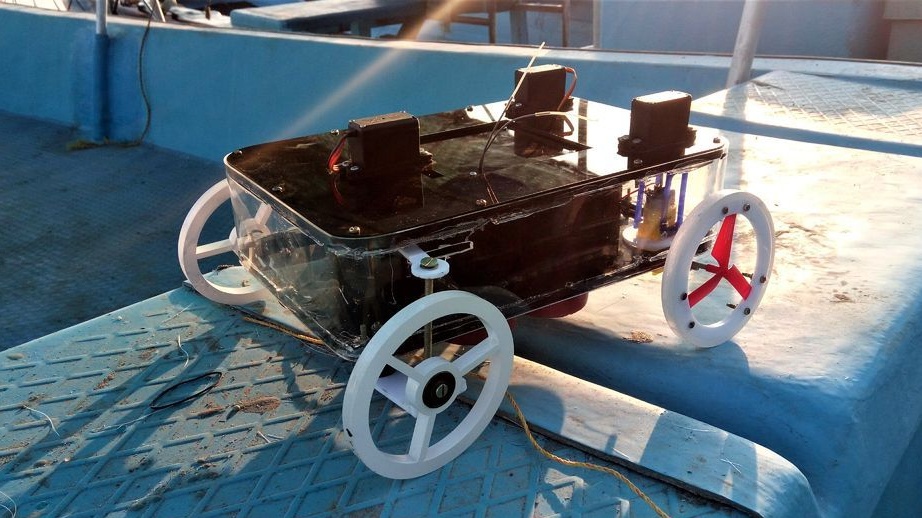
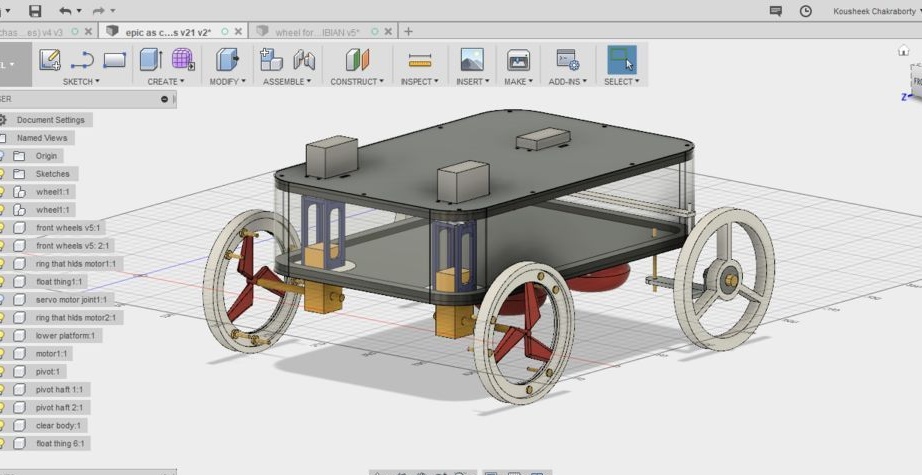
În imaginile de mai jos puteți vedea transformarea vehiculului pe tot terenul atunci când vă deplasați prin pământ și apă.
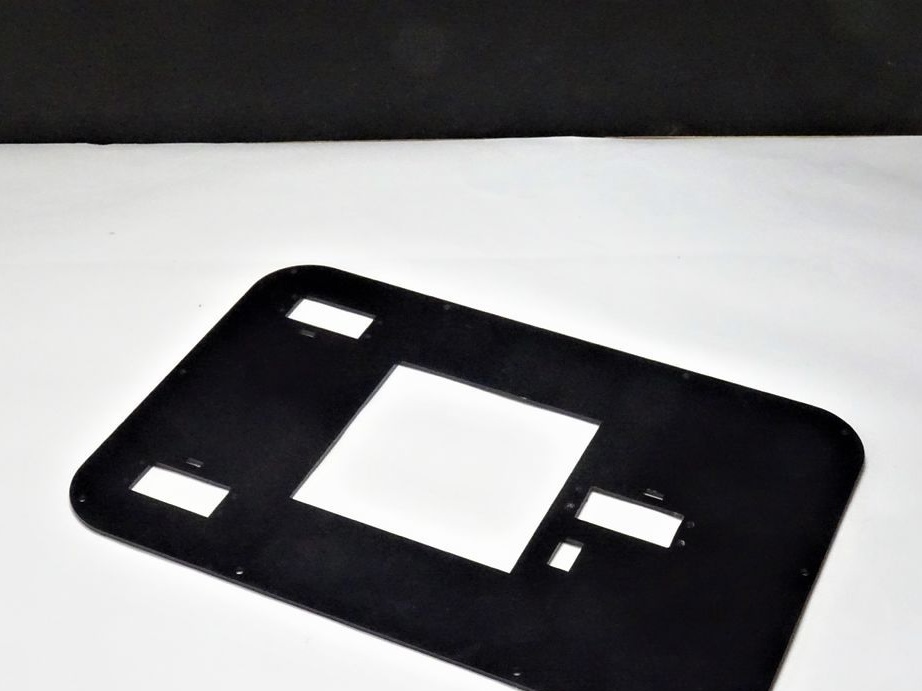
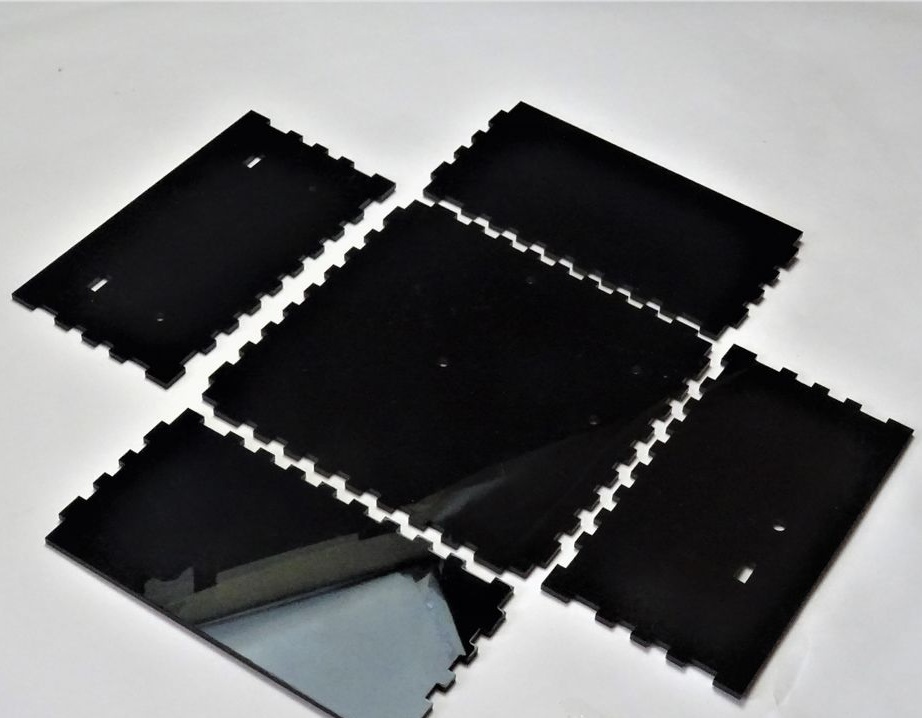
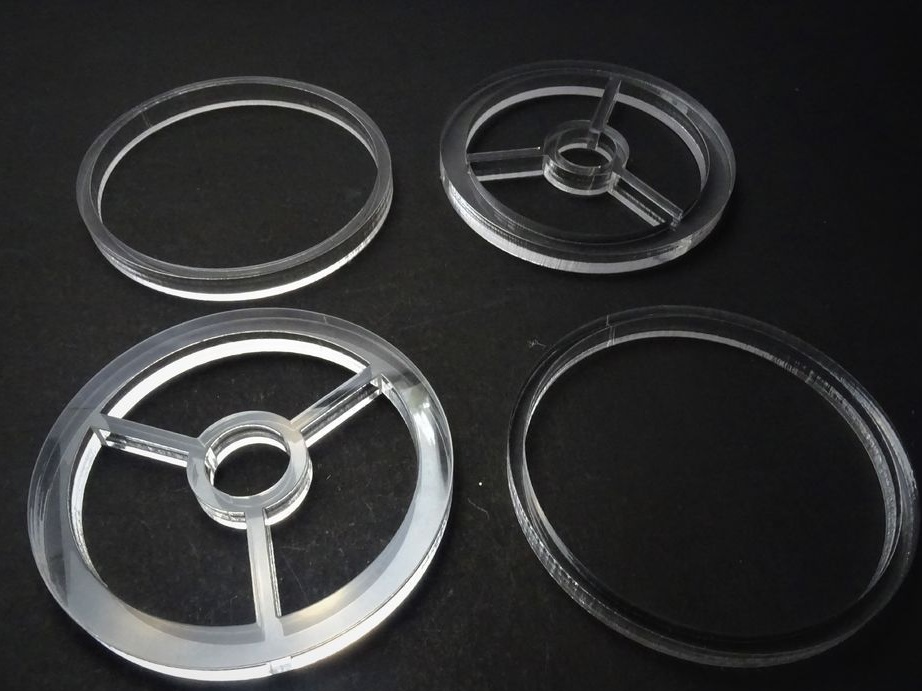
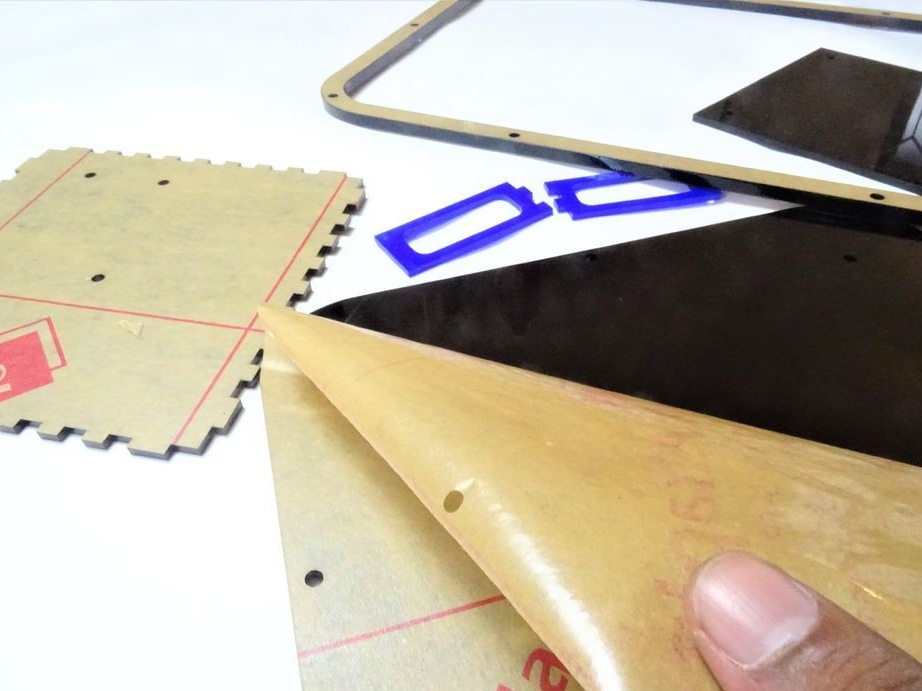
Pasul doi: Tăierea cu laser
Pentru vehiculul cu toate terenurile, maestrul a folosit acrilic de diferite grosimi și culori.
Palton superior negru 3 mm x 1
Strat inferior Negru 3 mm x 1
Cadru lateral negru 5 mm x 2
Peretele lateral transparent 2 mm x 1
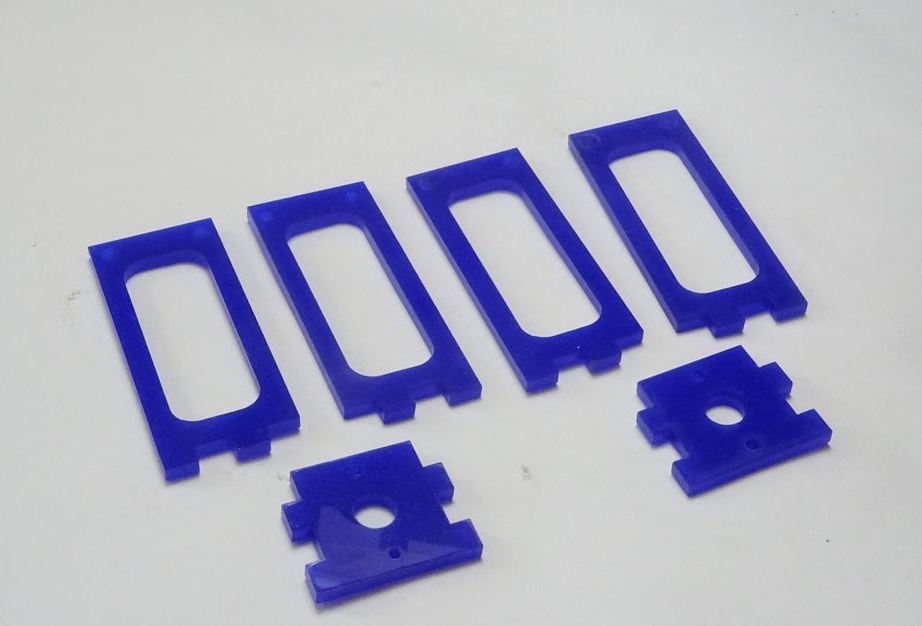
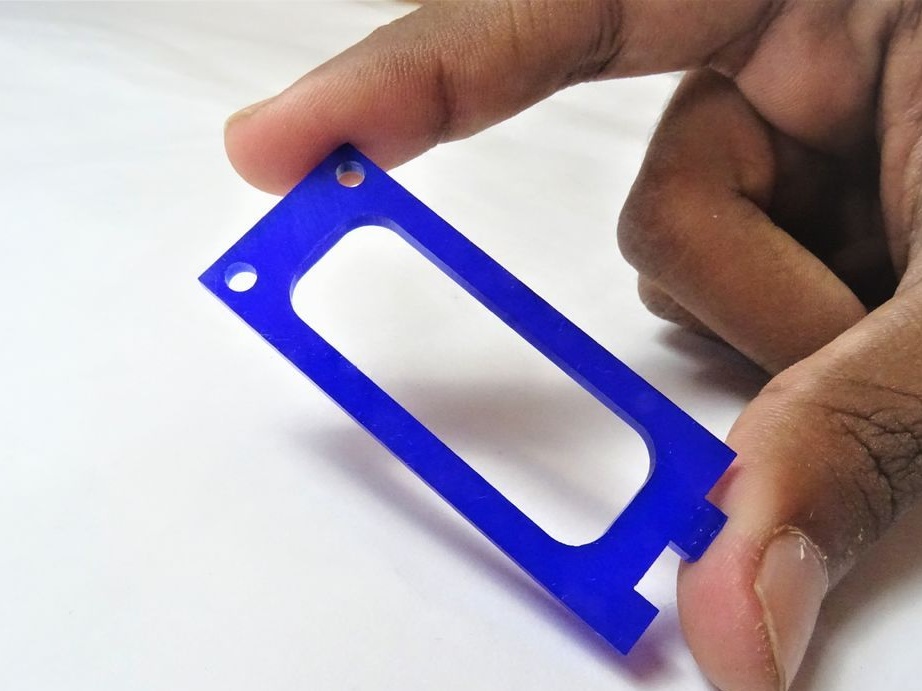
Putere albastră de 3 mm x 4
Bridge Top Piece albastru 3 mm x 2
Discul motor alb 3 mm x 2
Roată față albă 10 mm x 2
Janta interioară (roata din spate) albă 3 mm x 4
Janta exterioară (roata din spate) Albă 10 mm x 2
Steering White 3 mm x 1
Dulap de sertar Negru 3 mm x 1
Capac de compartiment negru 3 mm x 1
Arborele motorului spate Alb 3 mm x 2
Panou frontal alb 5 mm x 2



Puteți descărca fișierul pentru CNC din link.
Partea cu laser de tăiere cu laser.zip
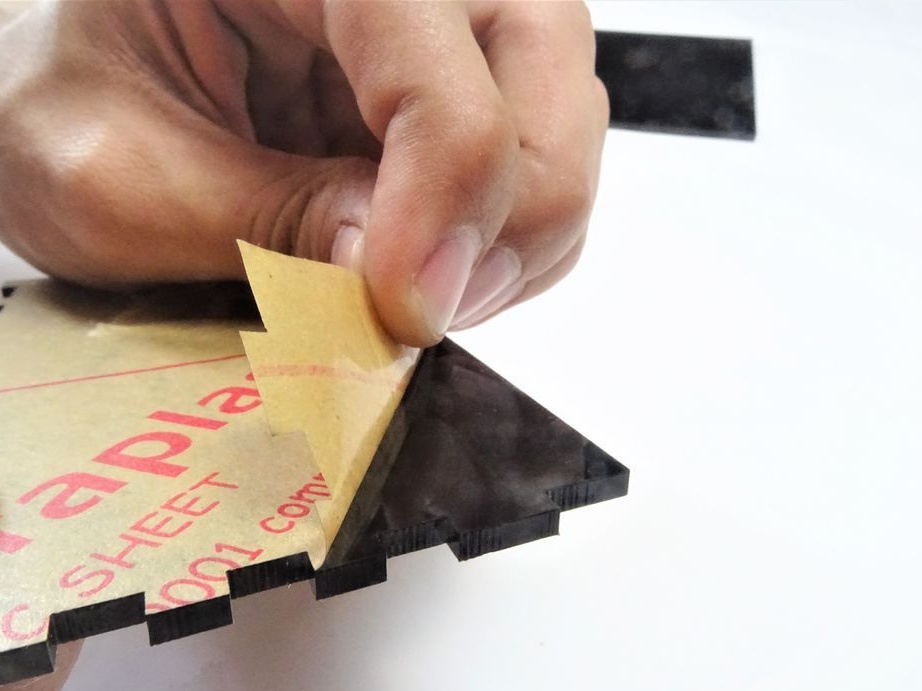
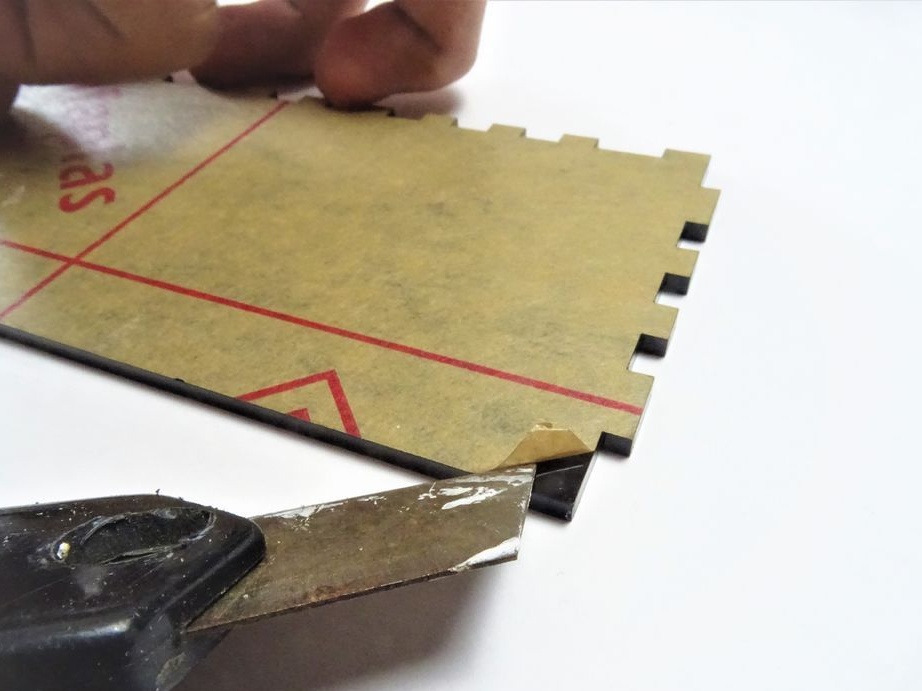
După fabricarea pieselor, îndepărtează stratul protector din ele.
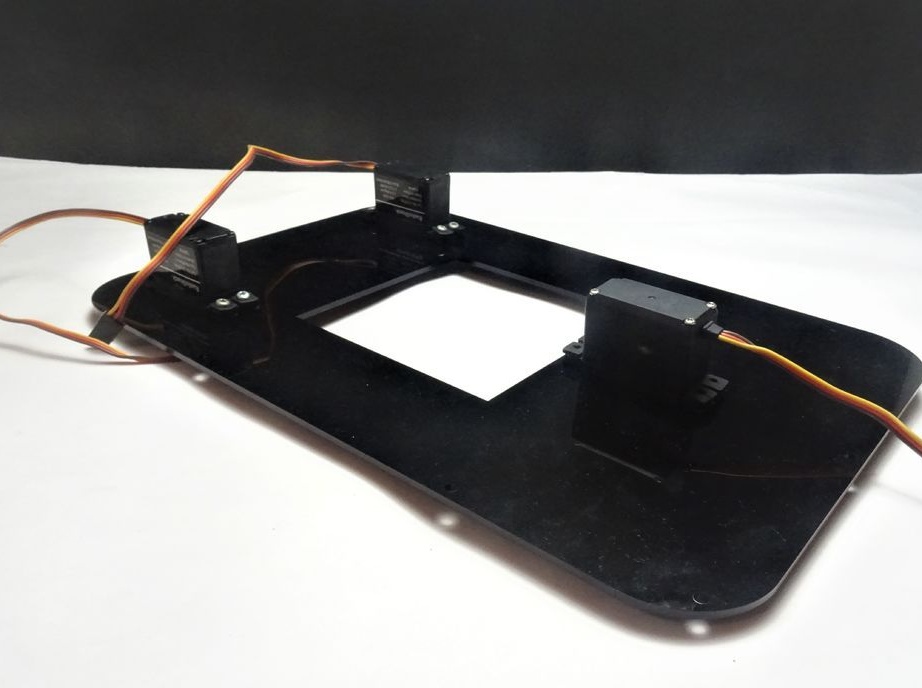
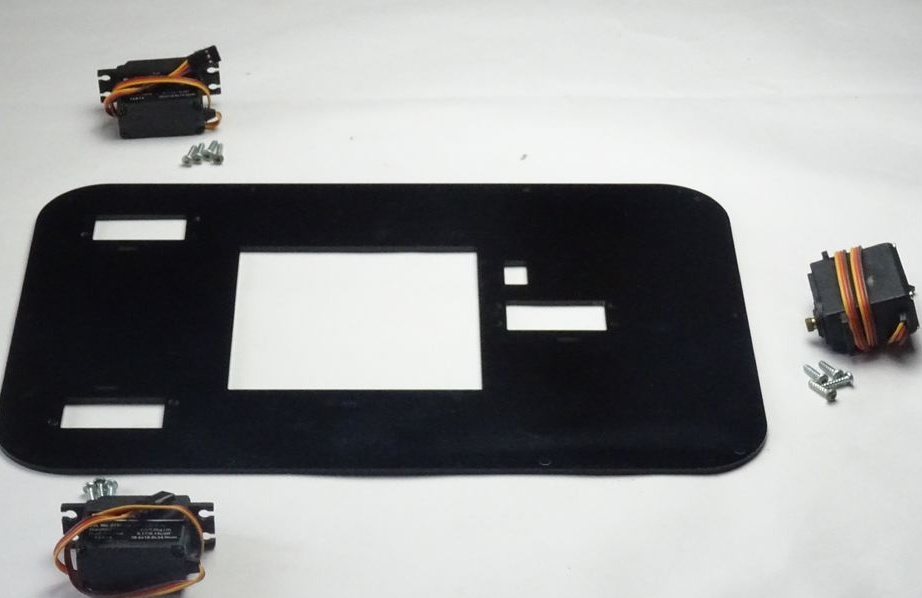
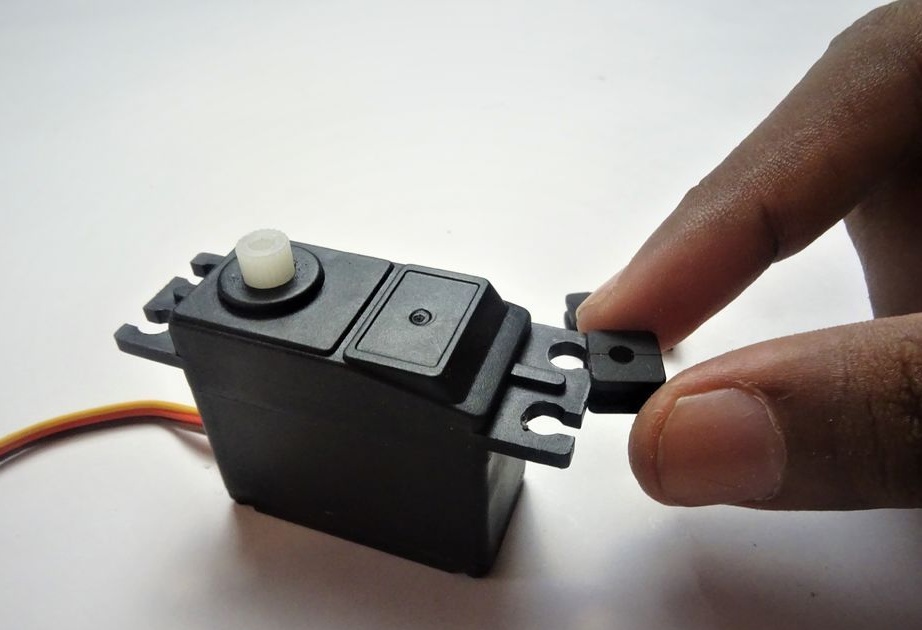
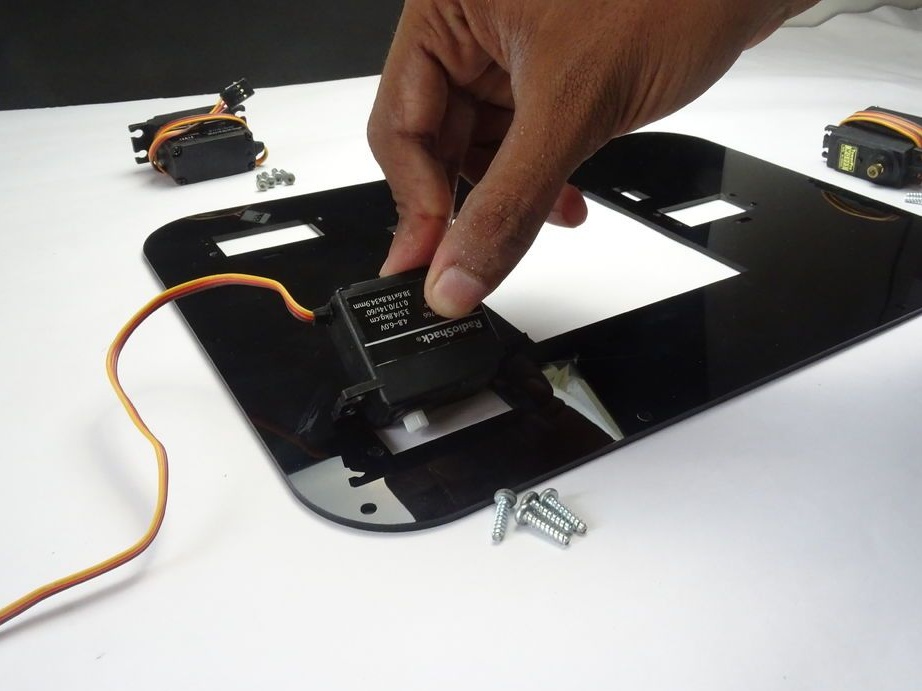
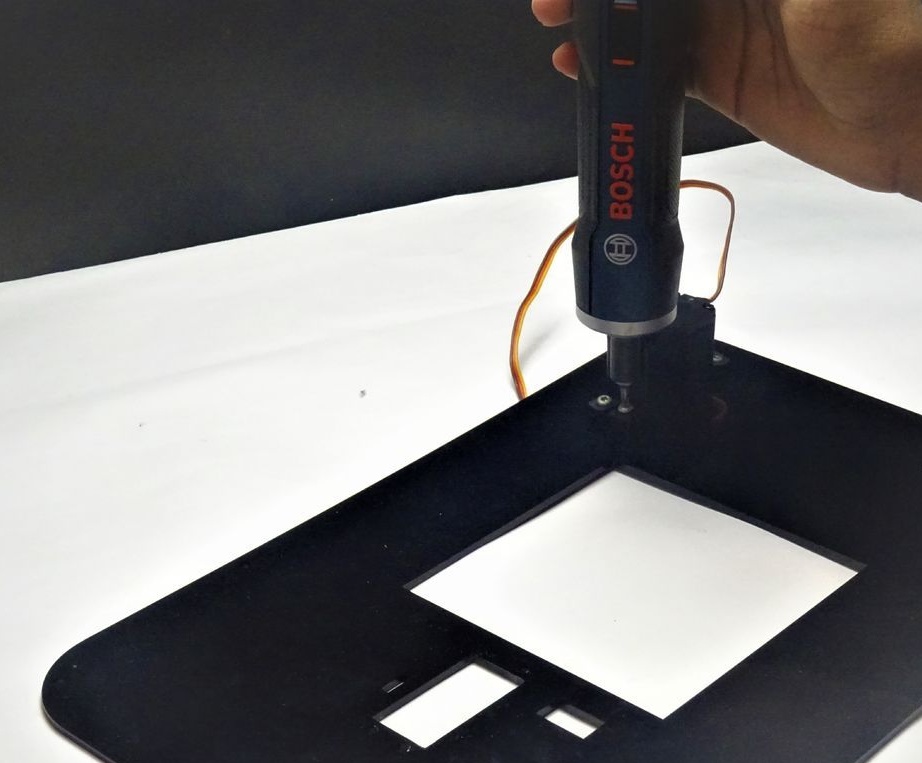
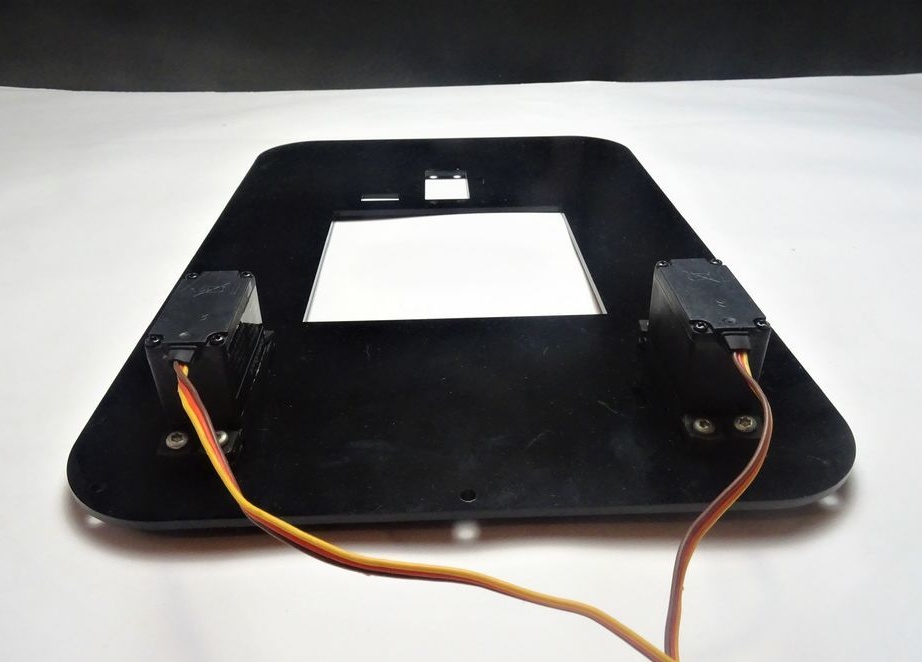
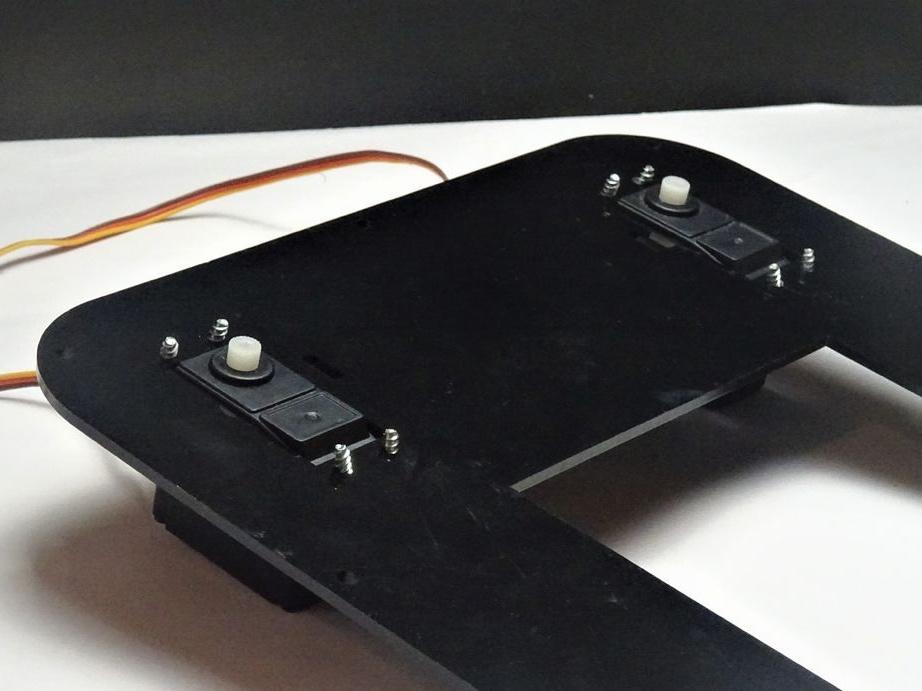
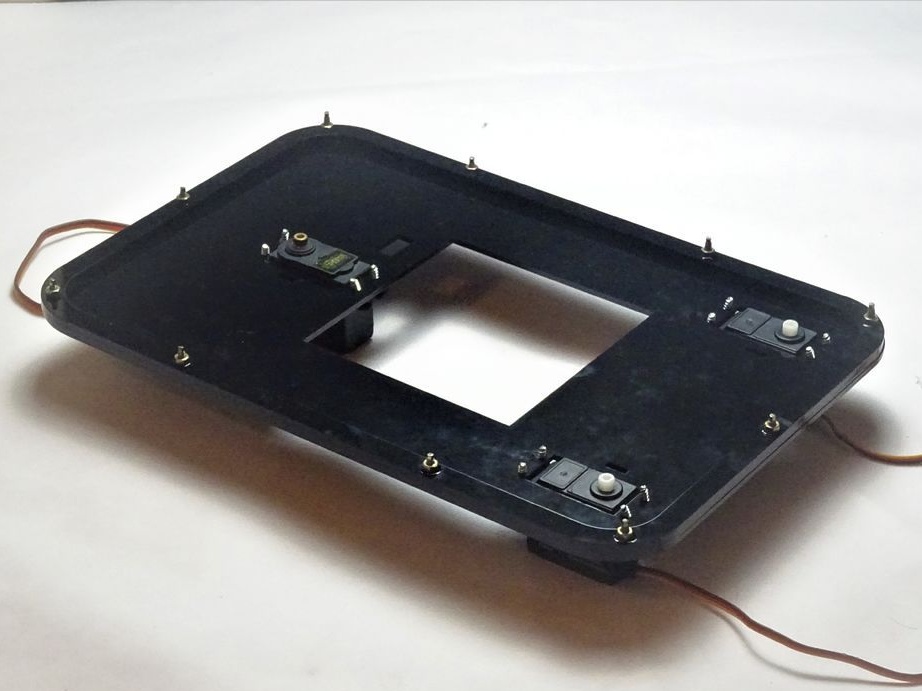
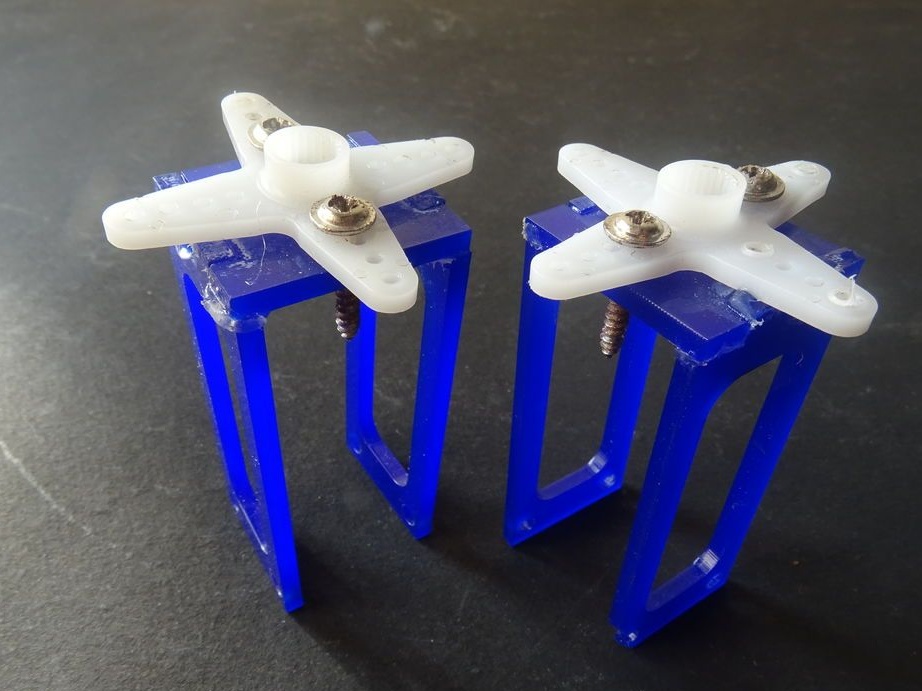
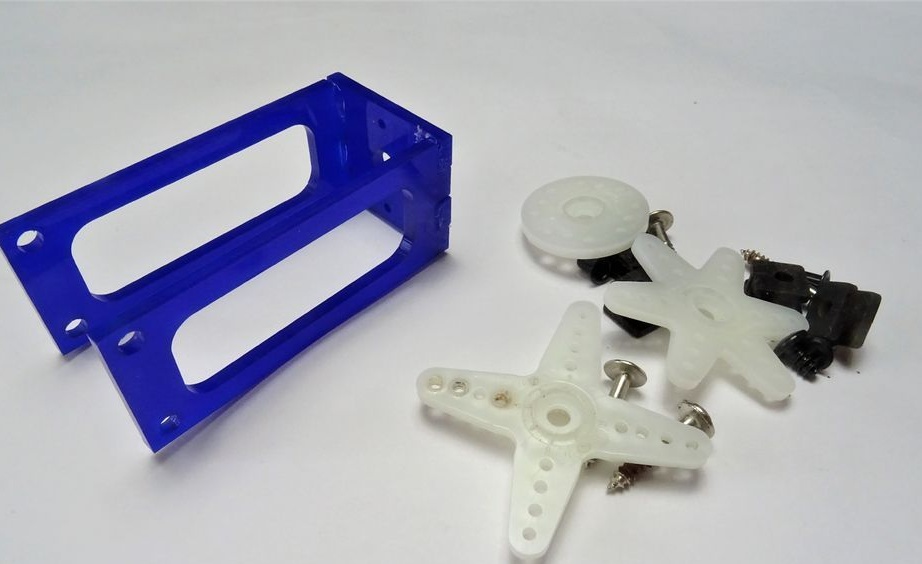
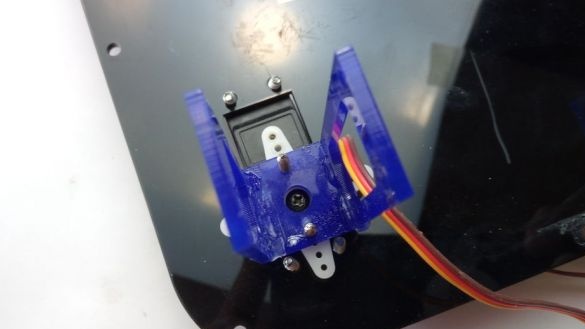
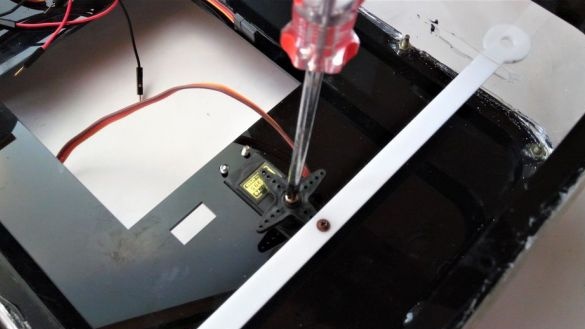
Pasul trei: Instalați Servo Motors
Toți cei trei servomotori sunt înșurubați pe platformă. Două în spate și una în față.

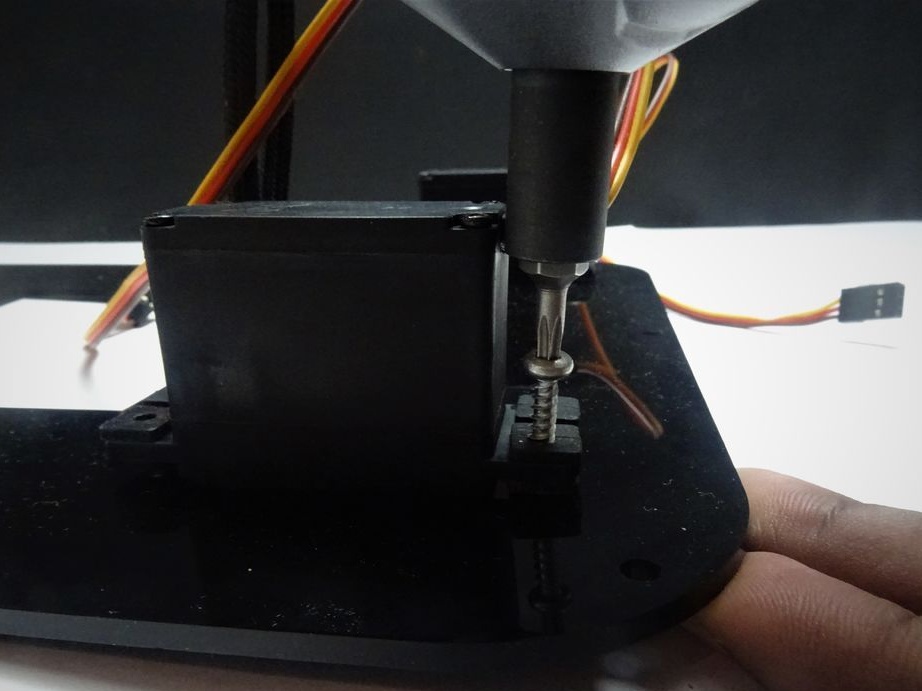
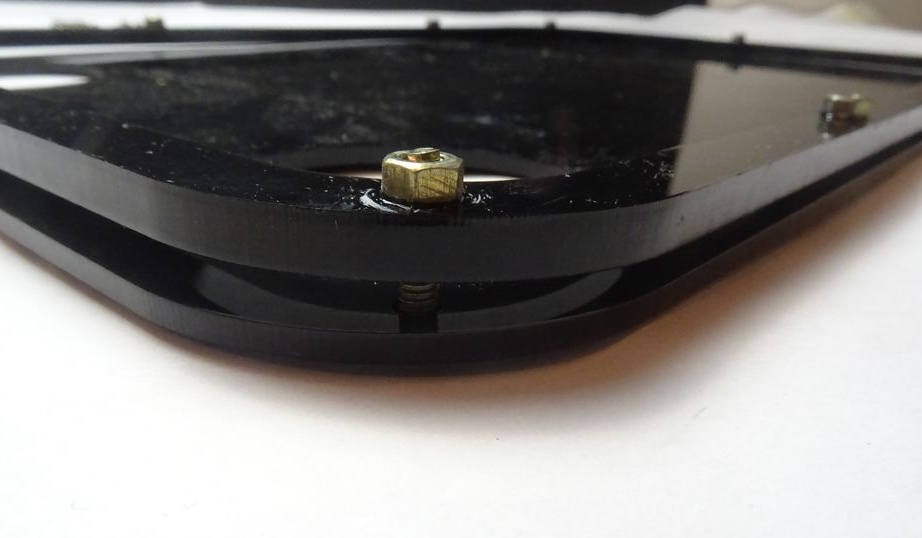
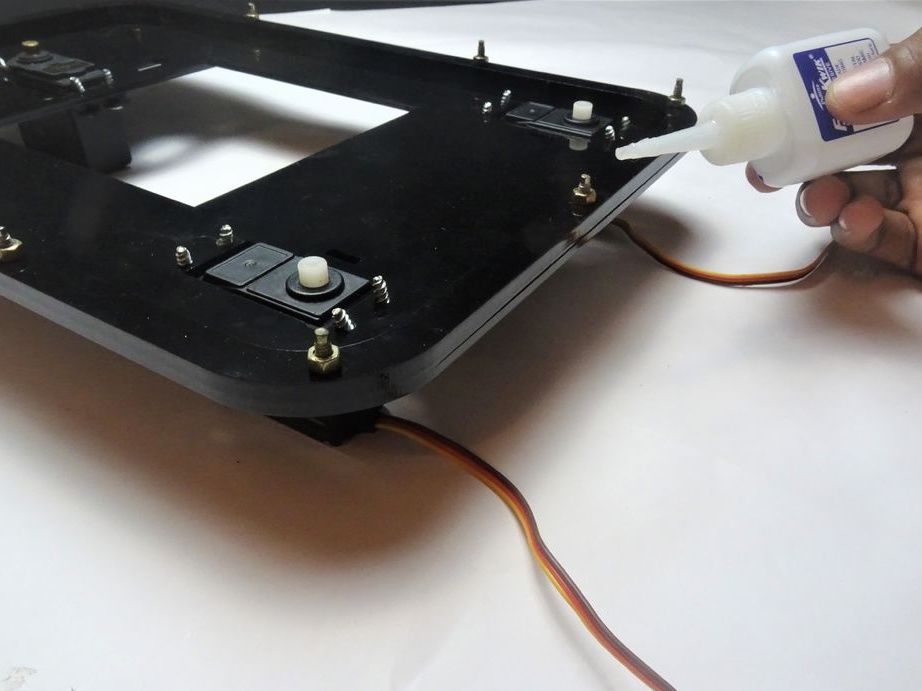
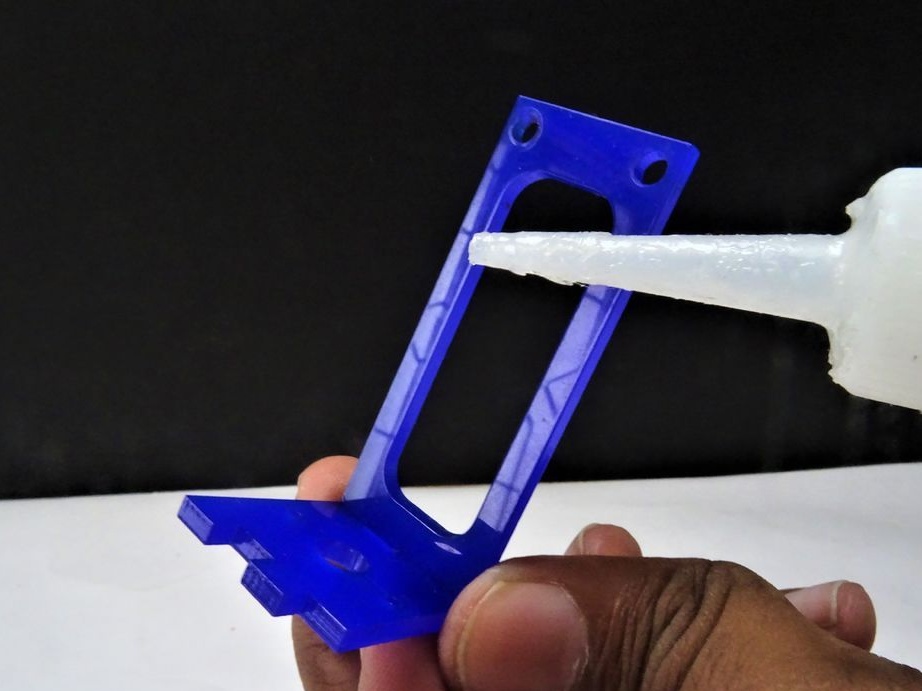
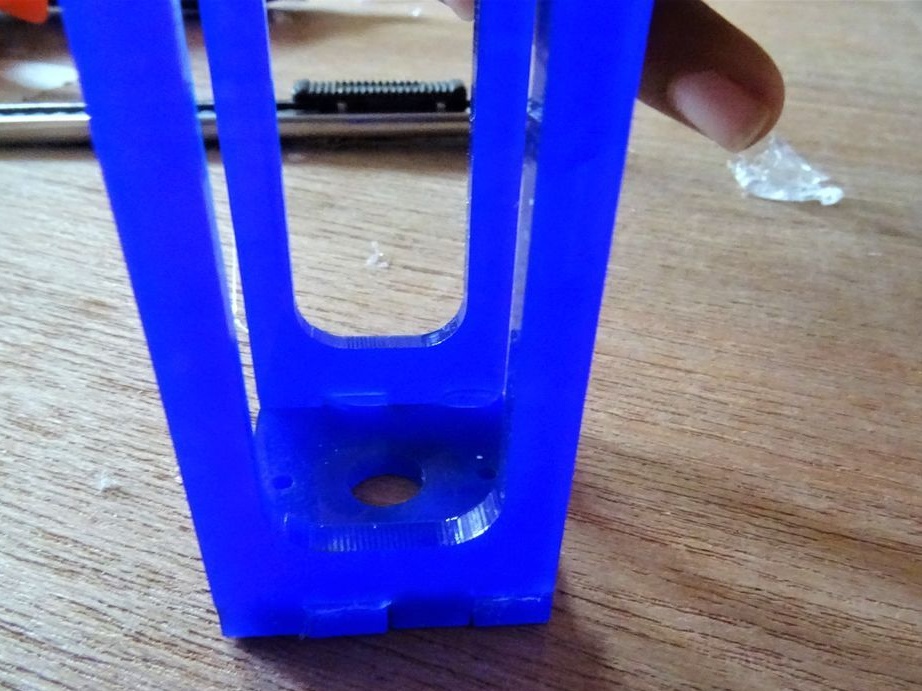
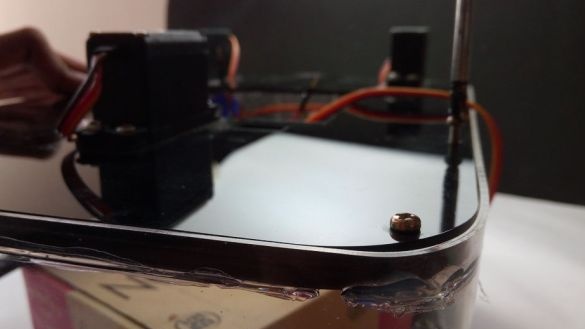
Pasul patru: nuci
Pentru accesul la mecanisme, părțile superioare și inferioare sunt strânse între ele. Lipeste piulițele de pe superglue pe cadru, apoi o întărește cu epoxidice.


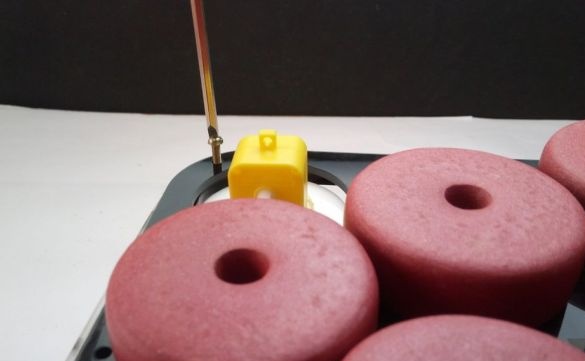
Pasul cinci: Plute
Glue plutește.



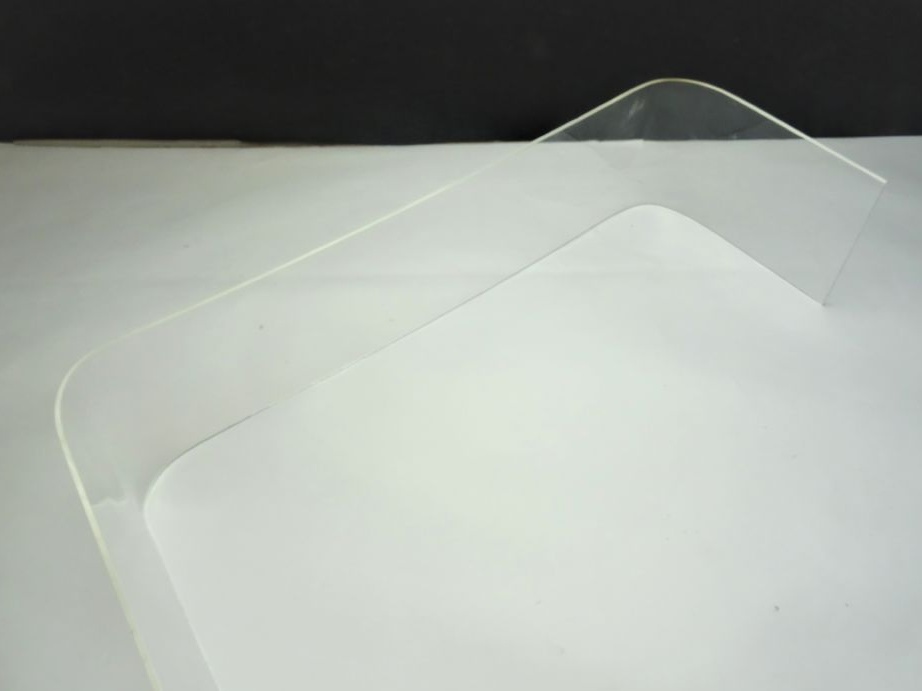
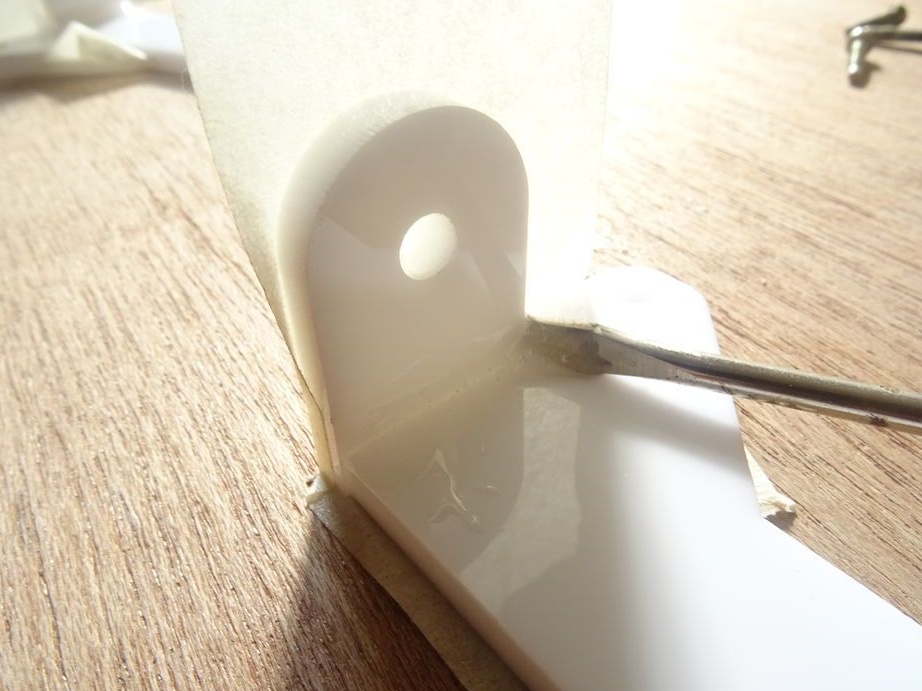
Pasul șase: modelarea acrilicului
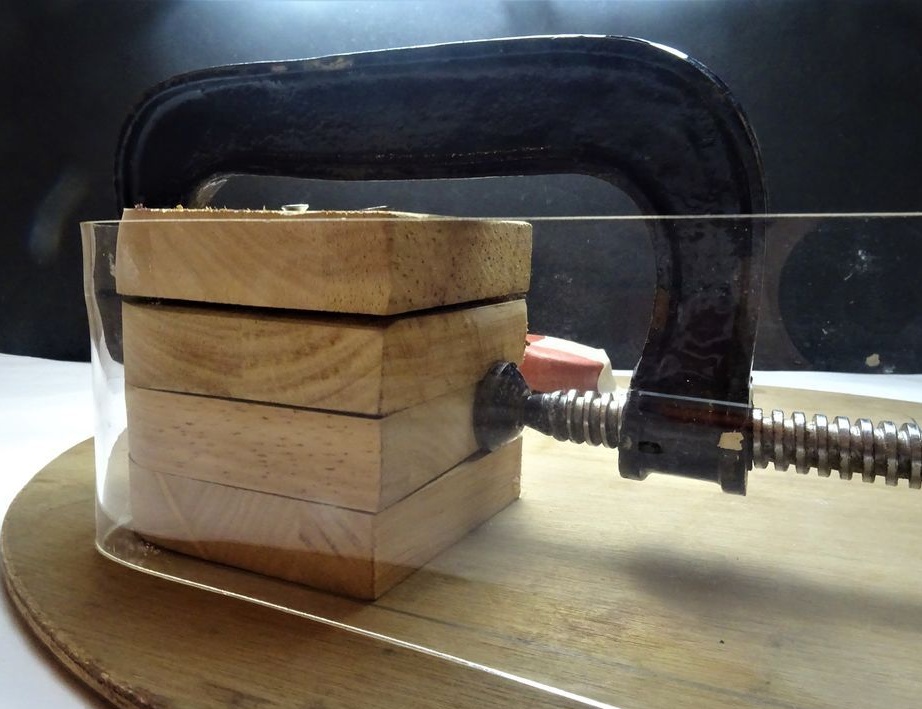
Pentru a îndoi acrilicul, un meșter face un șablon din lemn.



El fixează partea cu o clemă și, încălzind-o cu un uscător de păr, dă părții forma dorită.





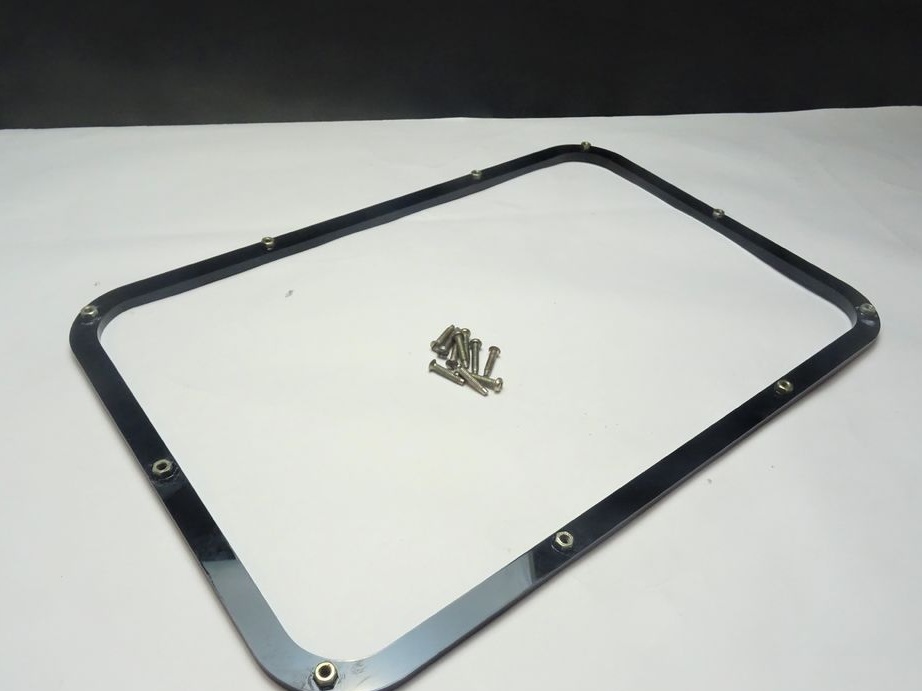
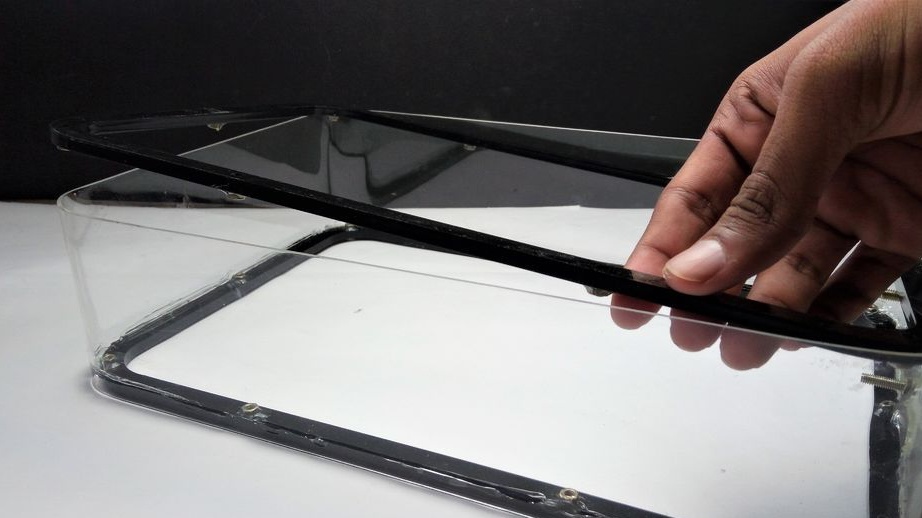
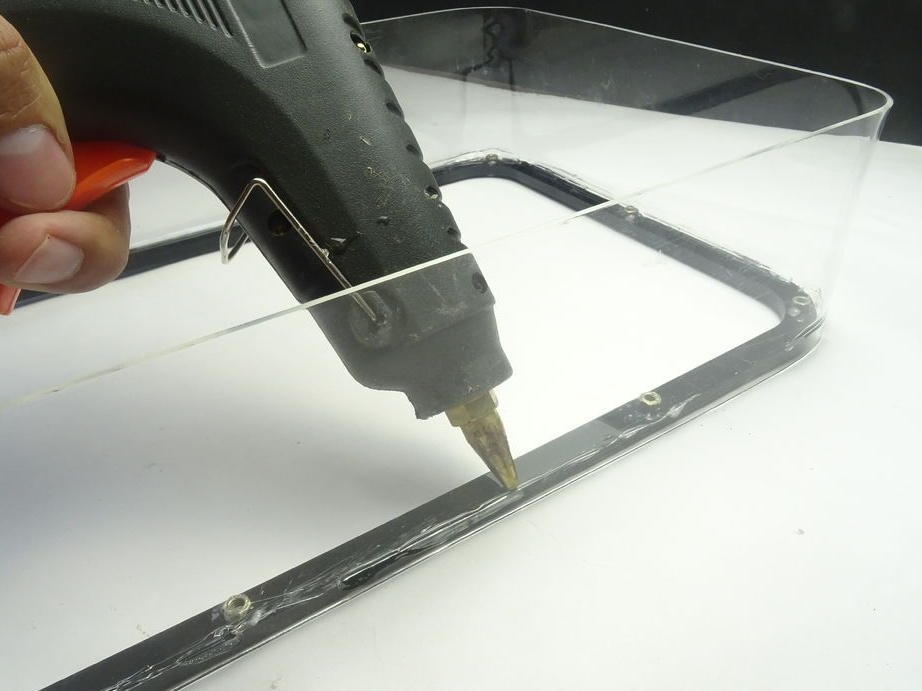
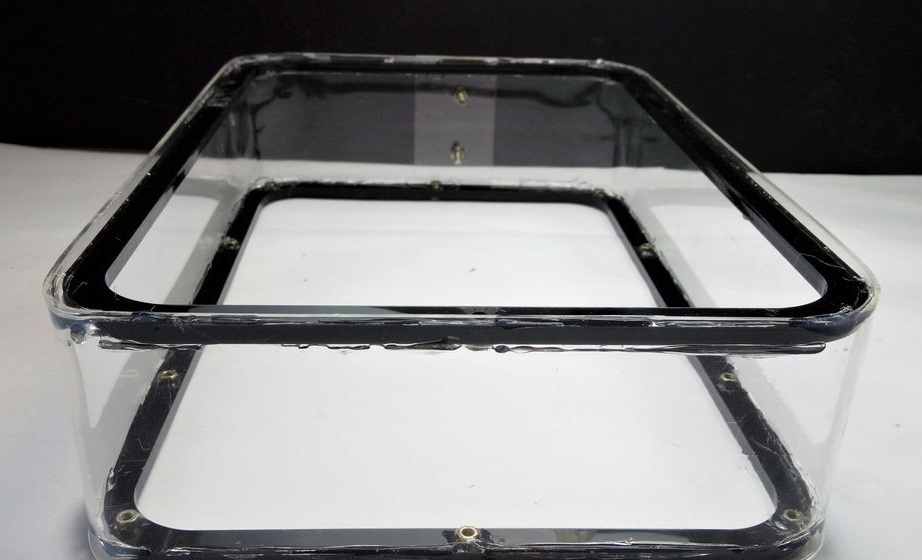
Al șaptelea pas: cadru
Lipeste ramele superioare și inferioare pe corpul transparent. Cusăturile sunt sigilate cu atenție cu lipici fierbinte.







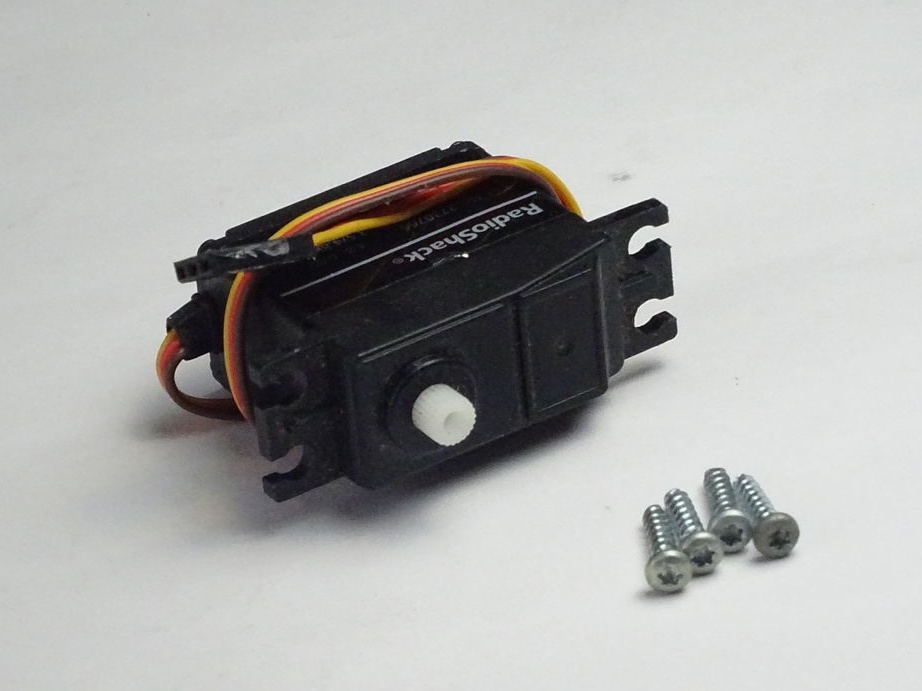
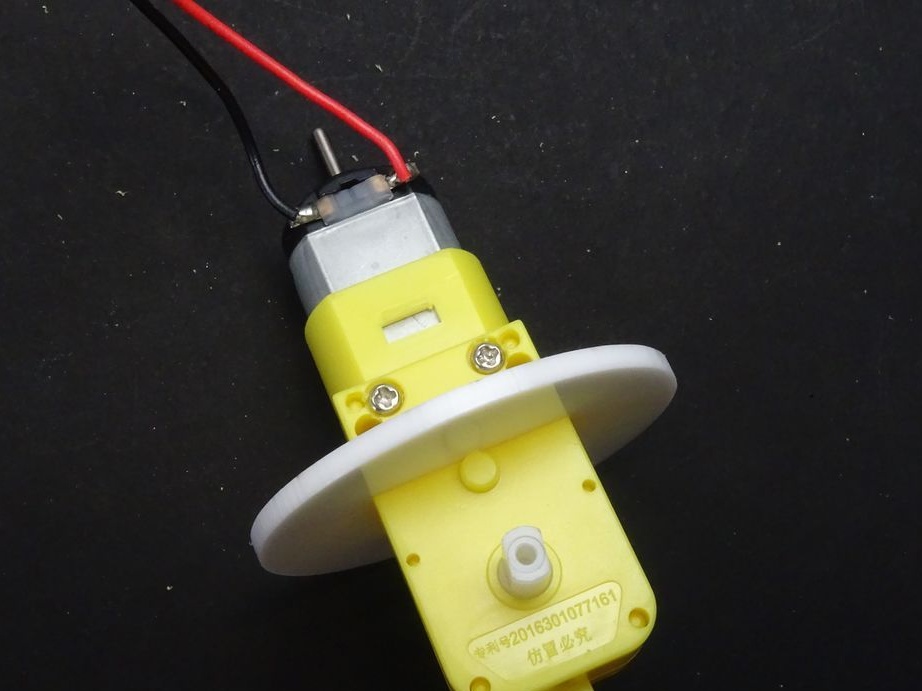
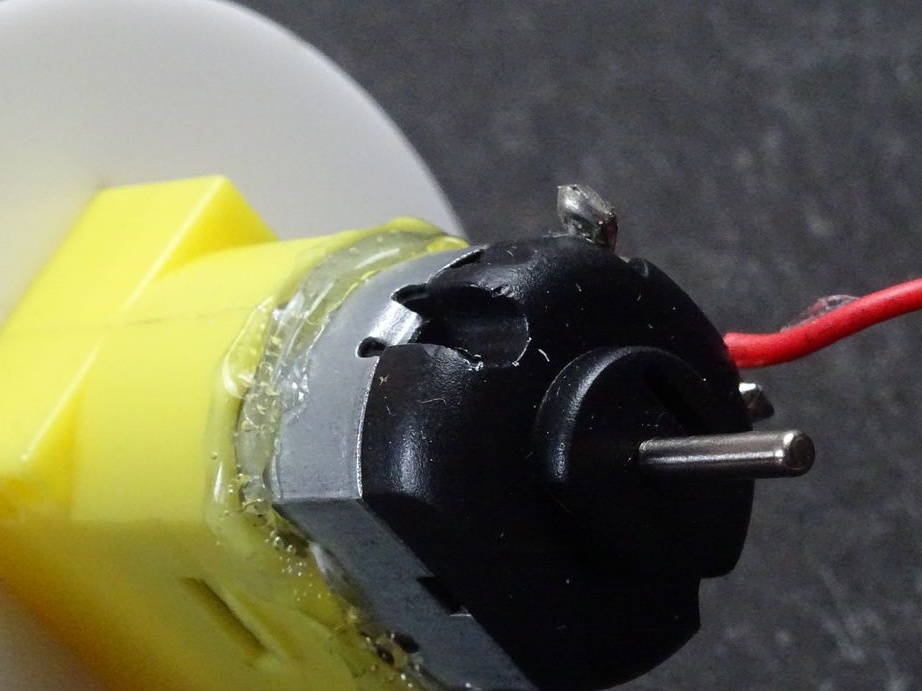
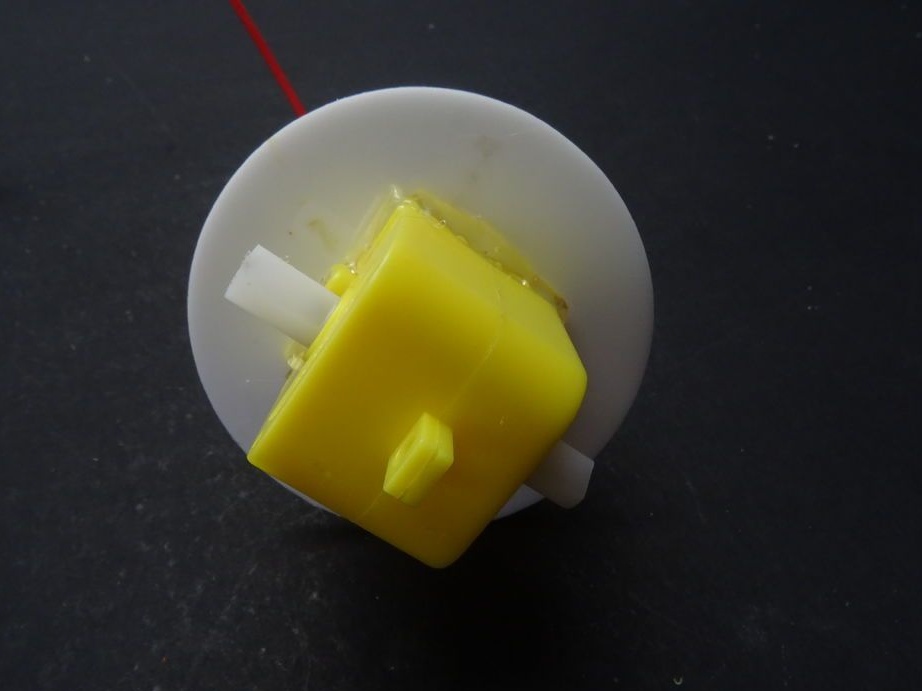
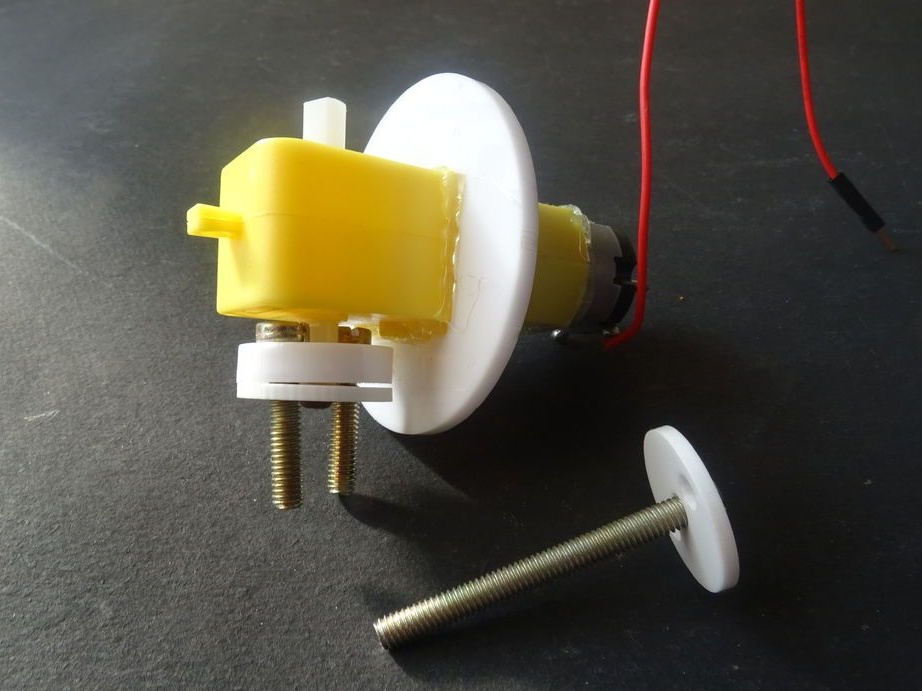
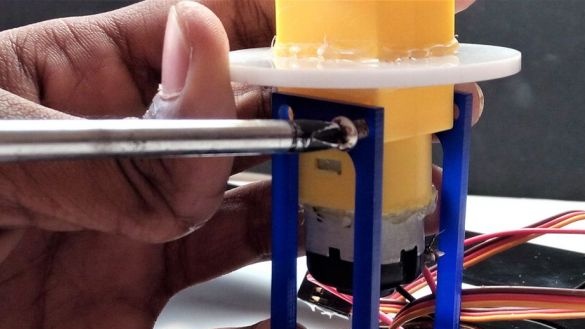
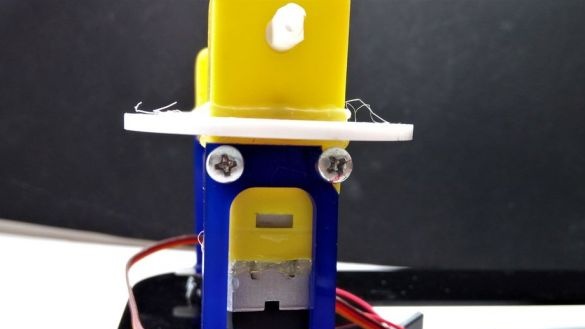
Pasul opt: Reglarea motorului
Acum trebuie să procesați carcasa motorului pentru a instala piese pe ea.
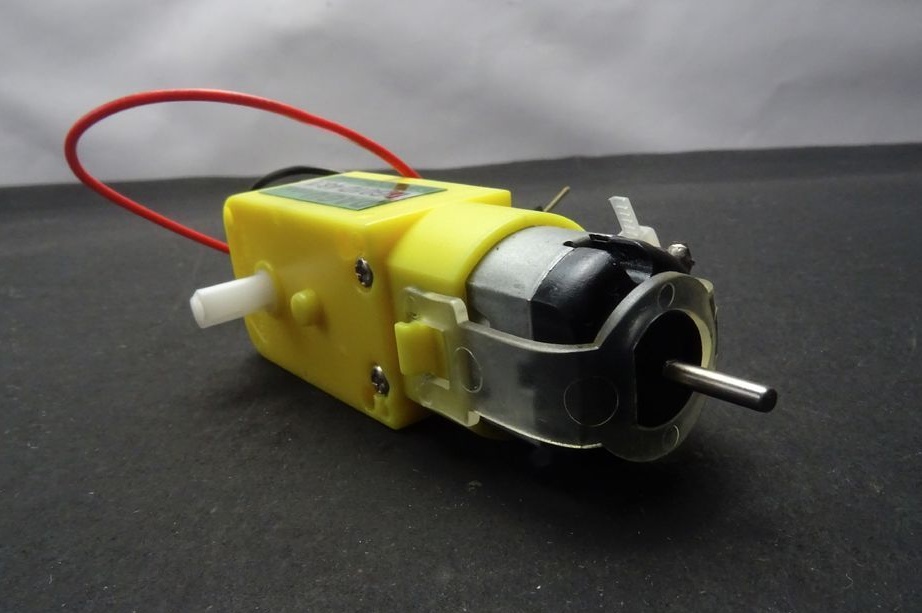
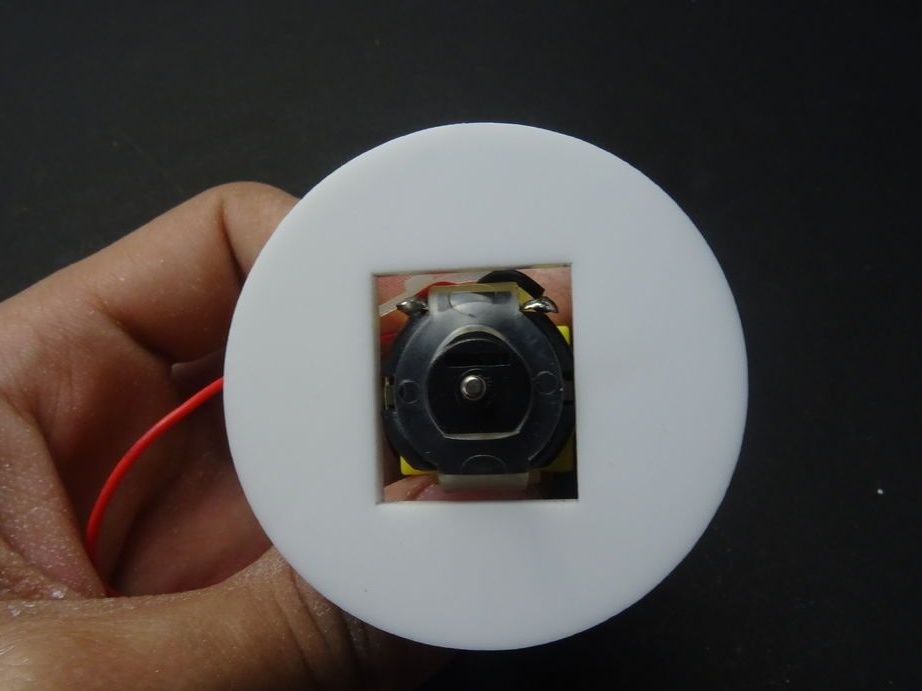
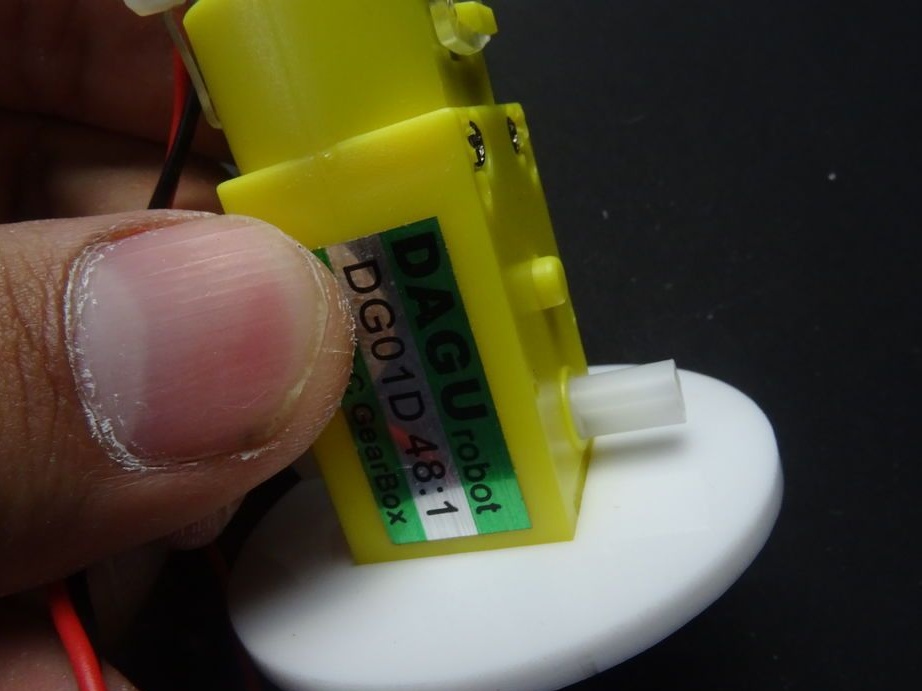

Tăie toate părțile proeminente din corp, până la autocolant.
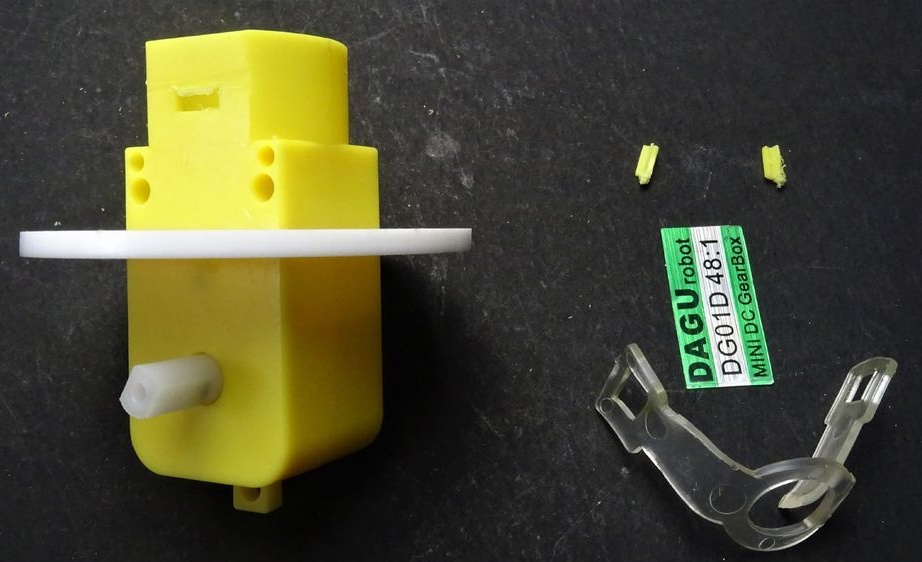

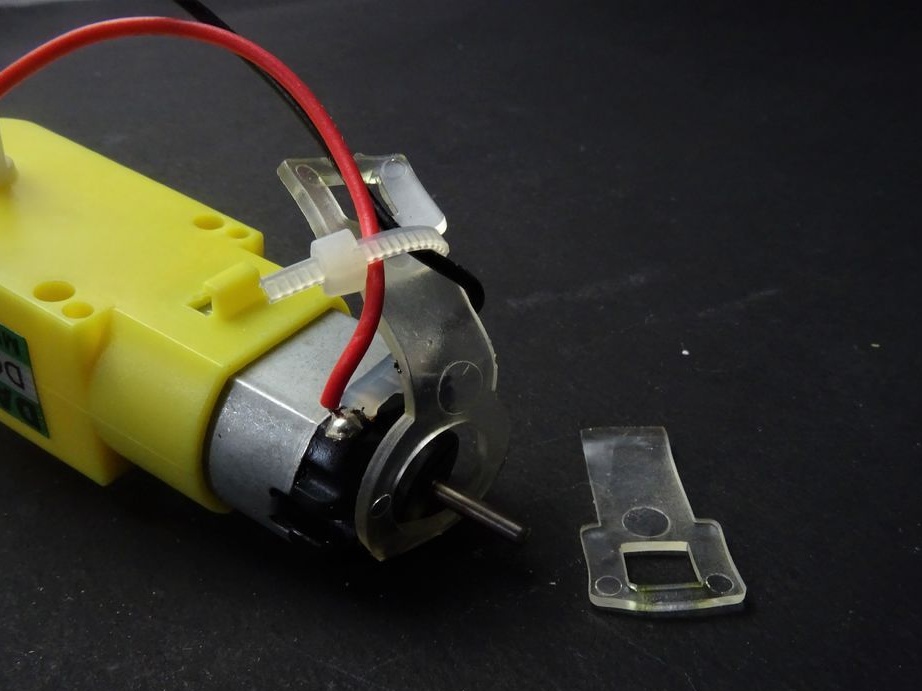
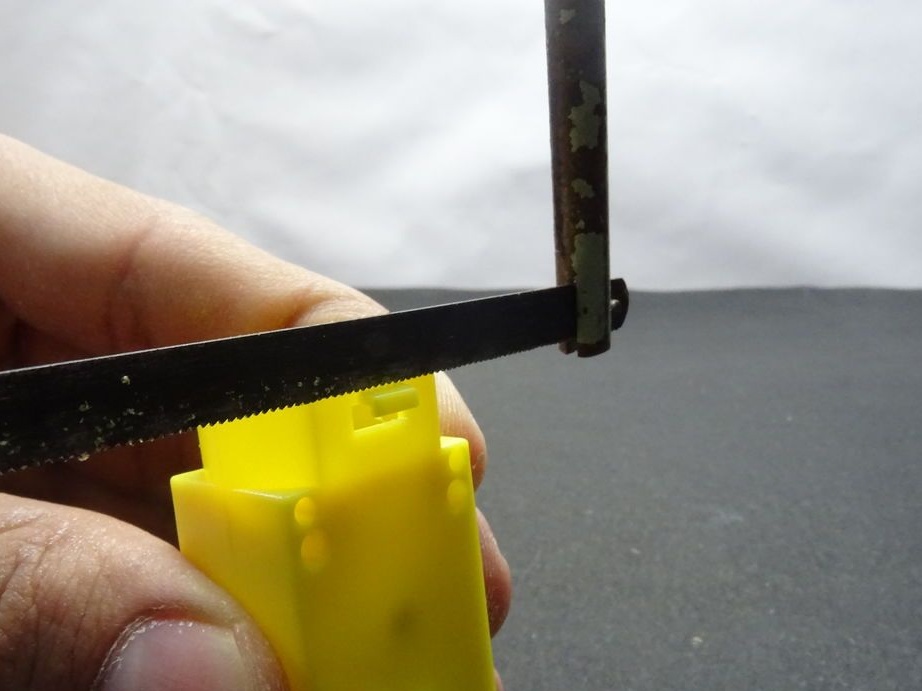


Instalează partea pe corp și lipeste-o. Deoarece a fost necesar să se taie suportul motorului (zăbrele), motorul se fixează și cu lipici.

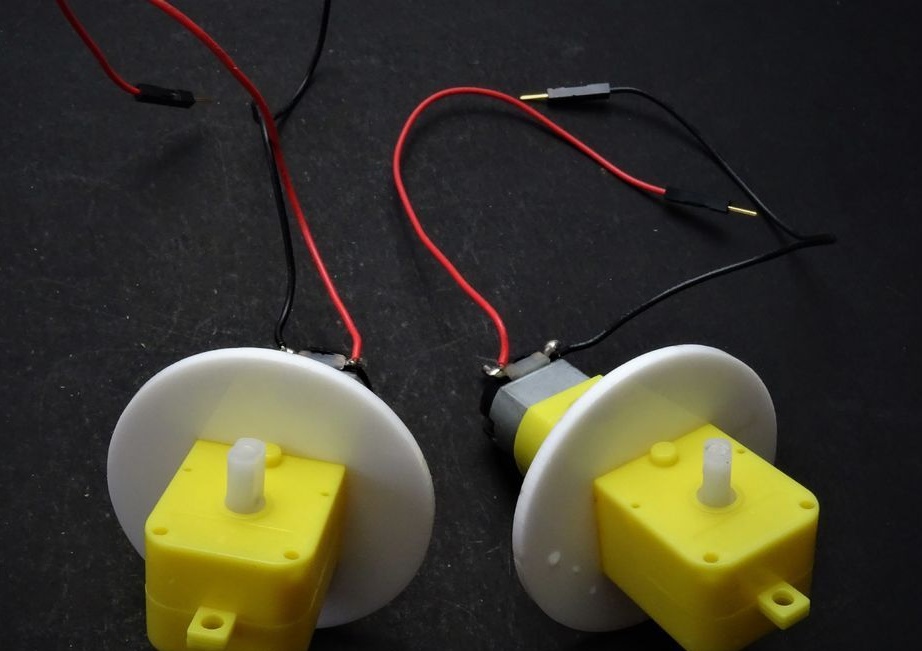

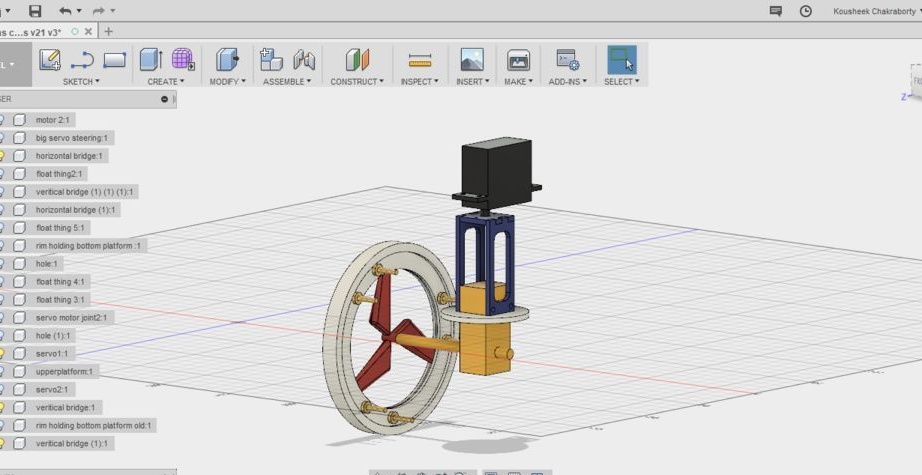
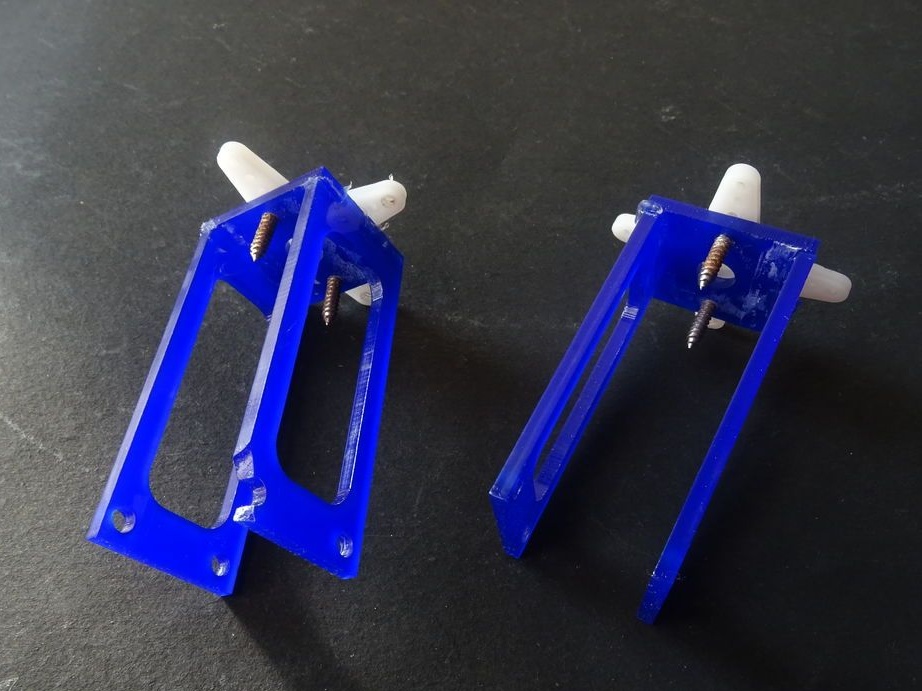
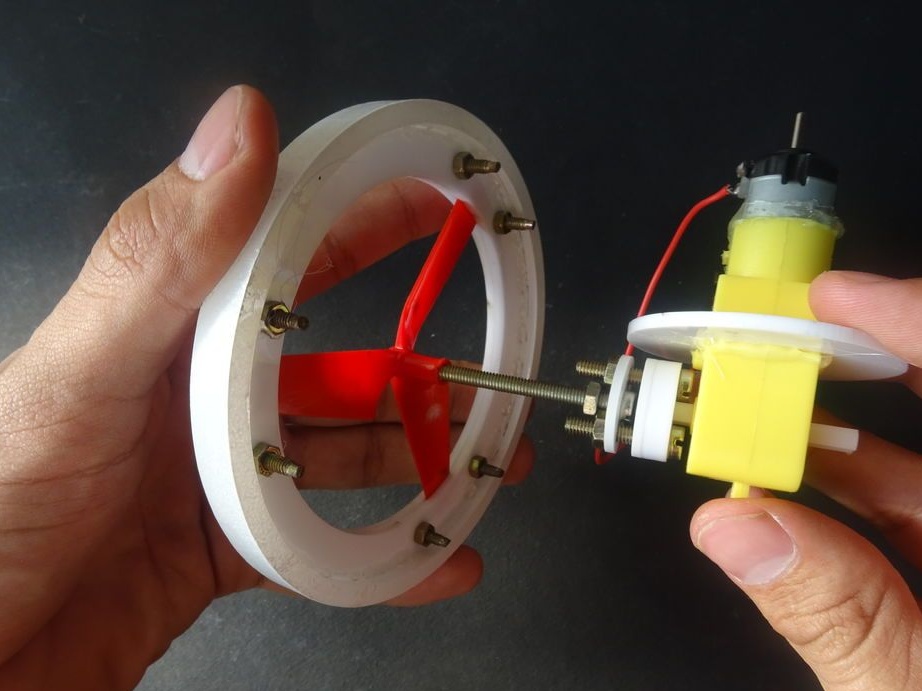
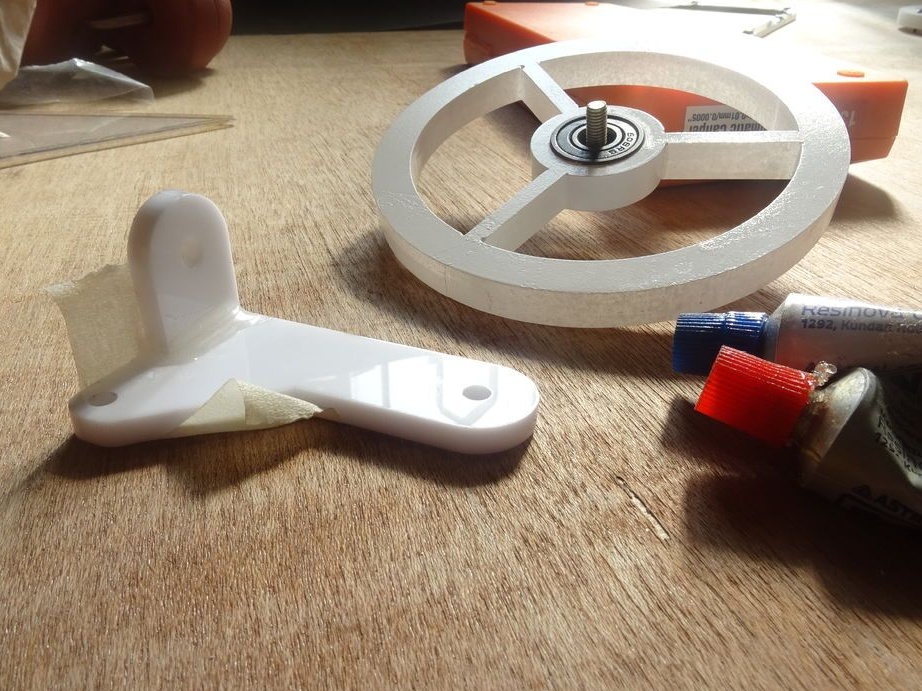
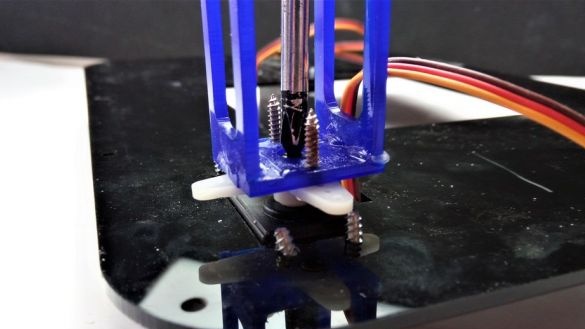
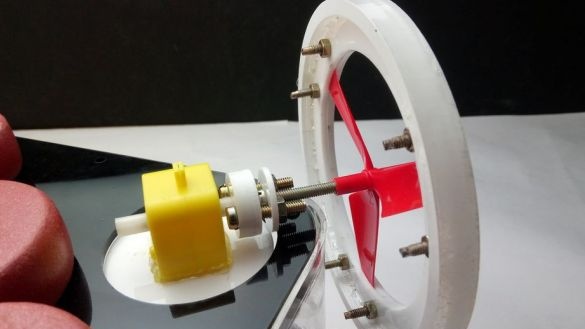
Pasul 9: Mecanism de pivotare
Asamblează o carcasă rotativă. În el va fi instalat un motor și se va conecta la servomotor.
Lipeste carcasa.

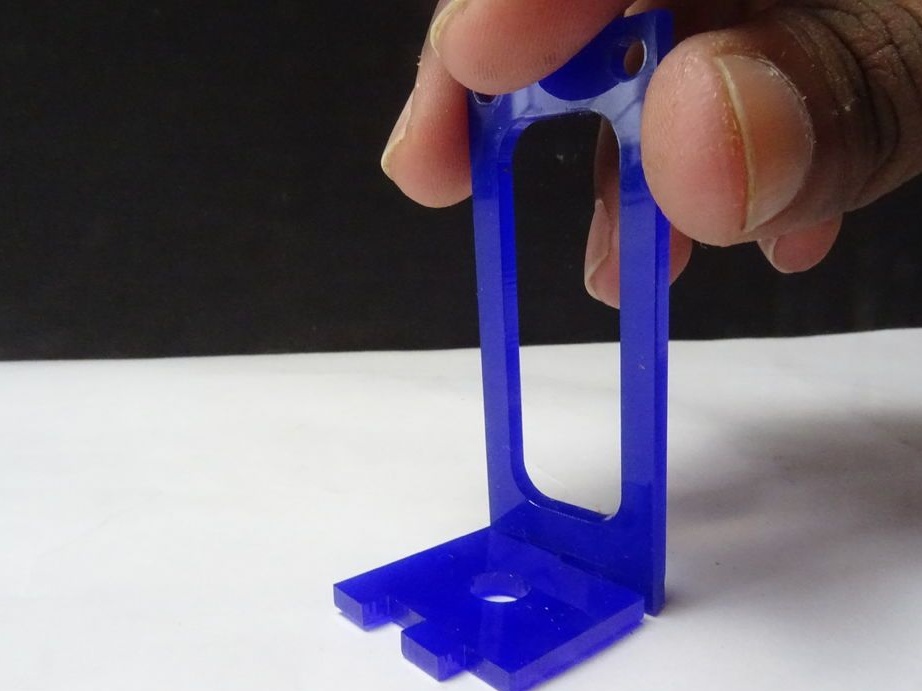

Șuruburi pe cuplaj.


Pasul 10: Pictura
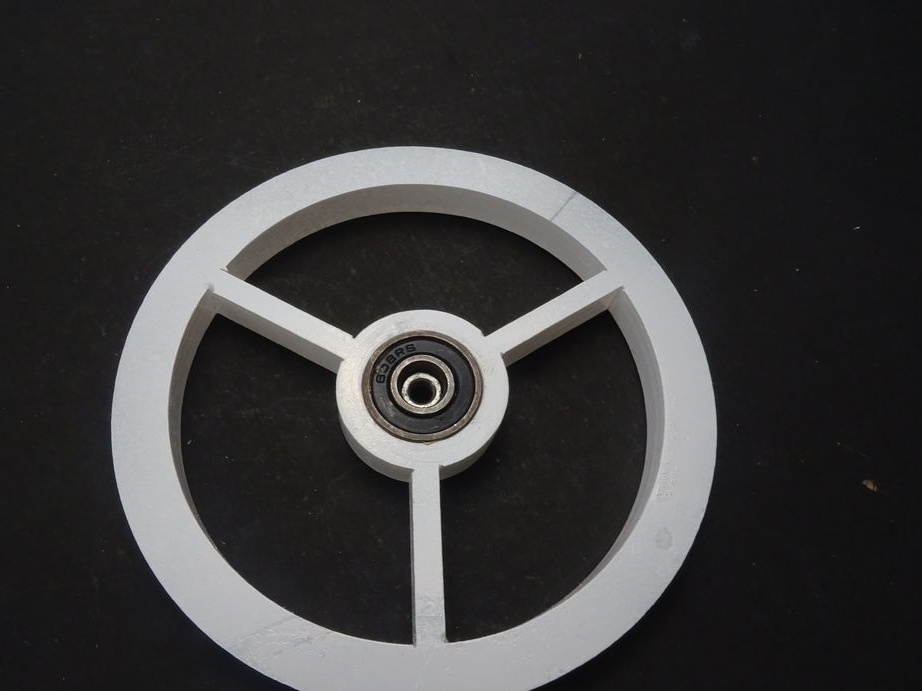
Deoarece maestrul nu avea acril alb cu grosimea necesară, roțile și janta au fost tăiate din acril transparent și apoi vopsite în alb.




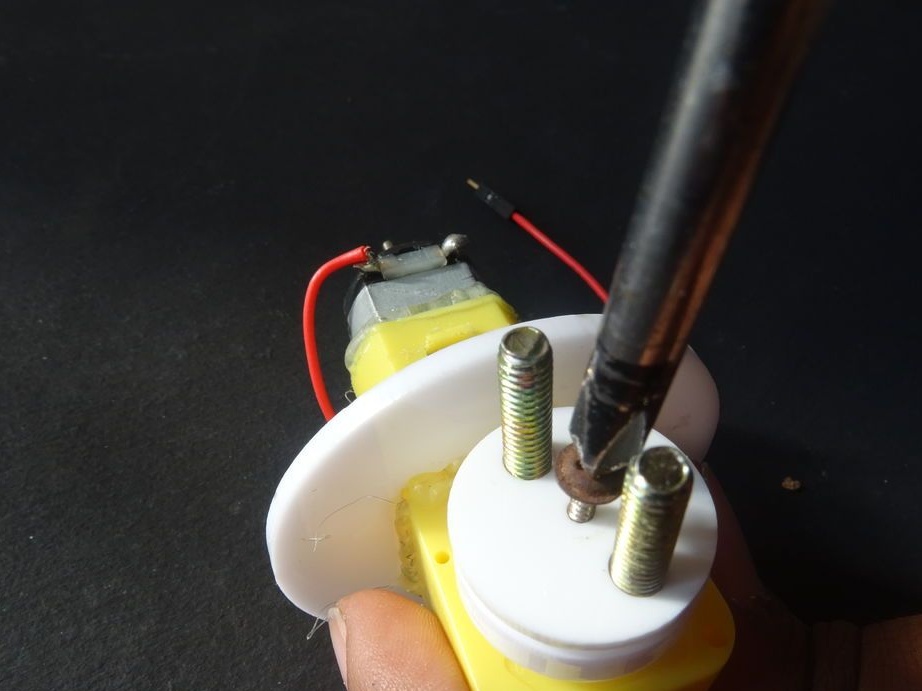
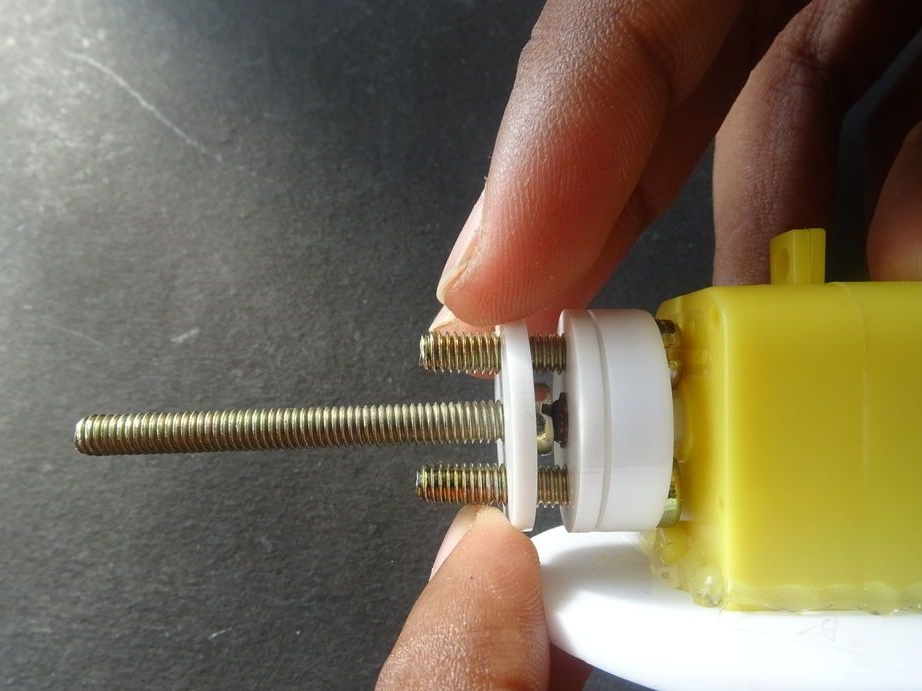
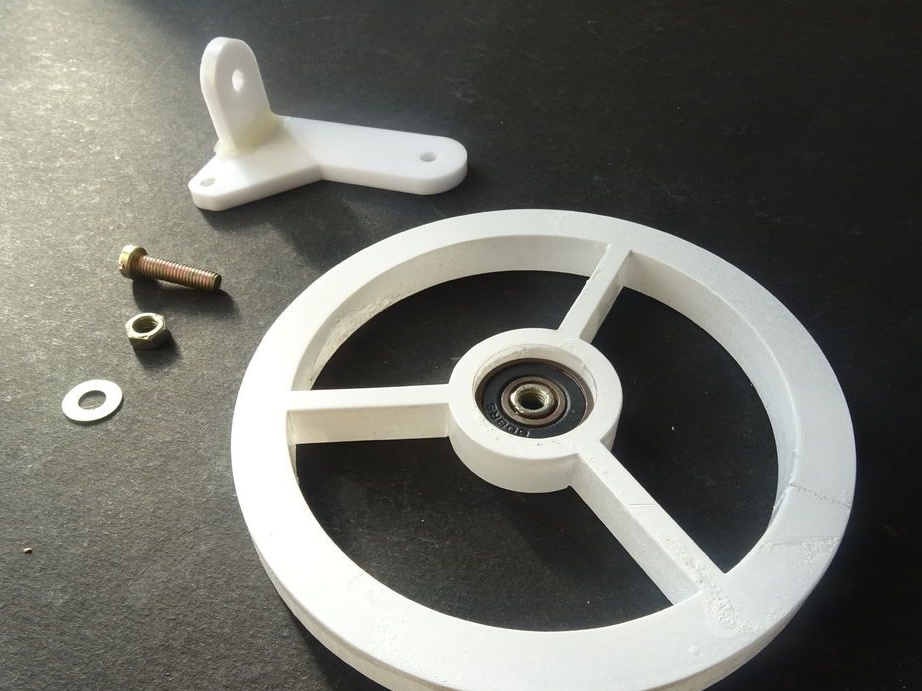
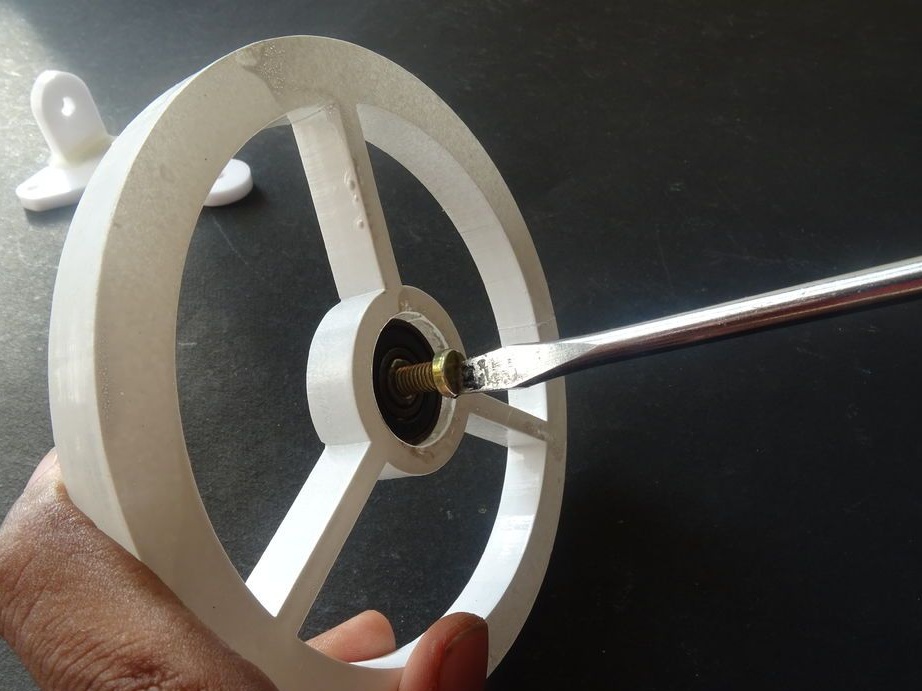
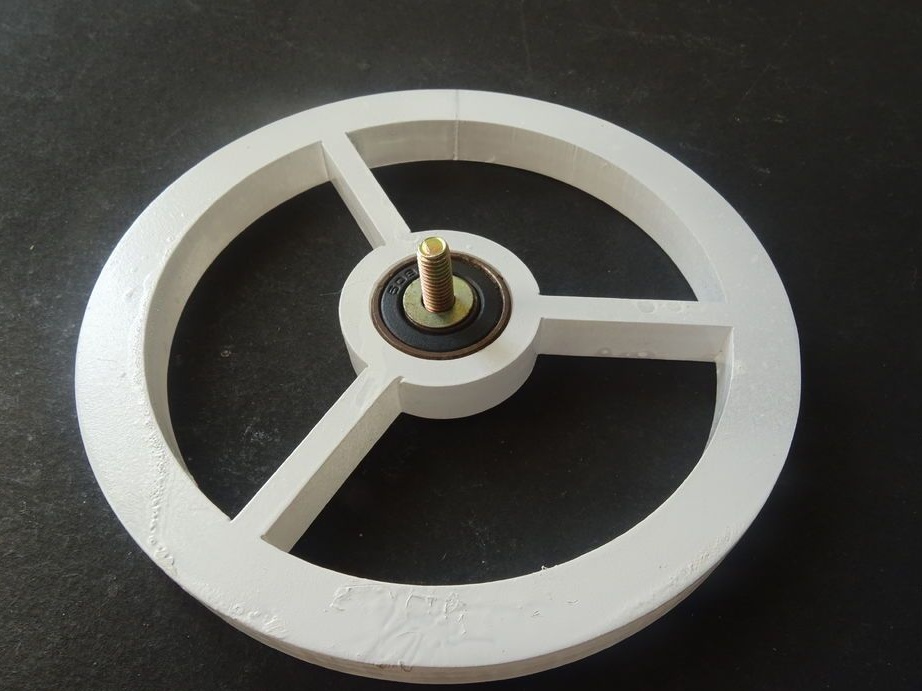
Pasul unsprezece: ansamblul roții
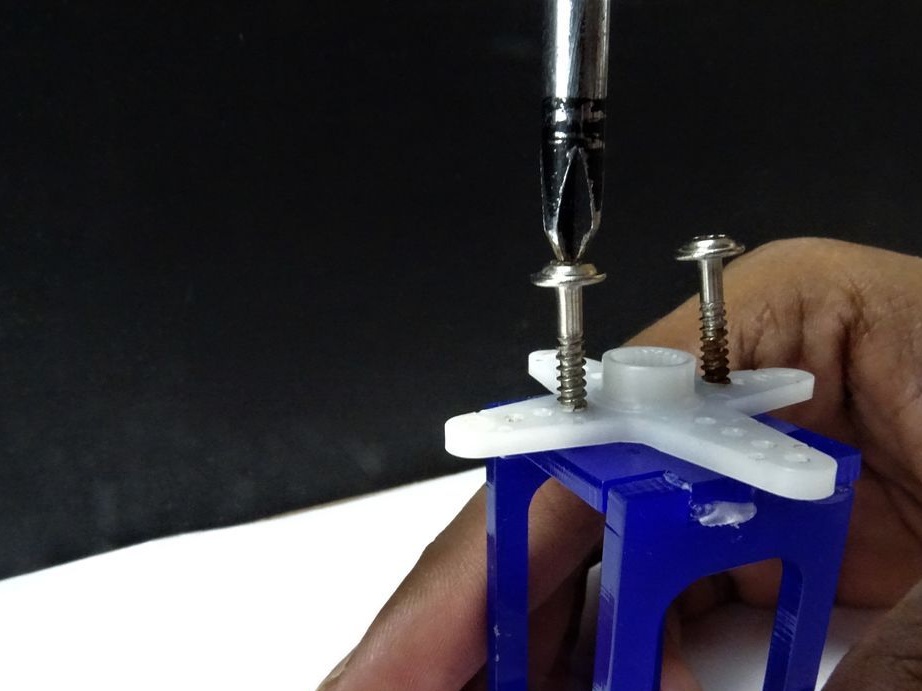
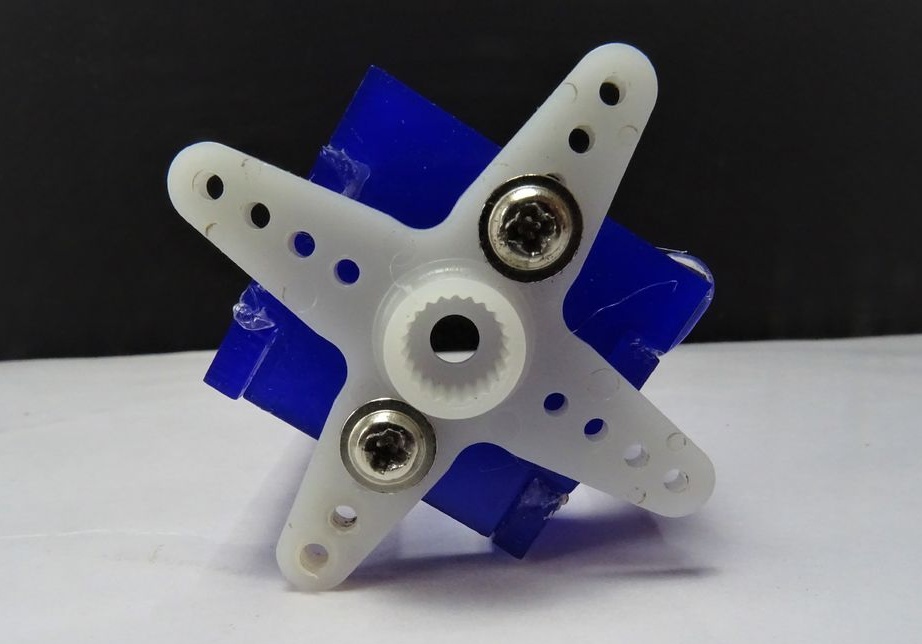
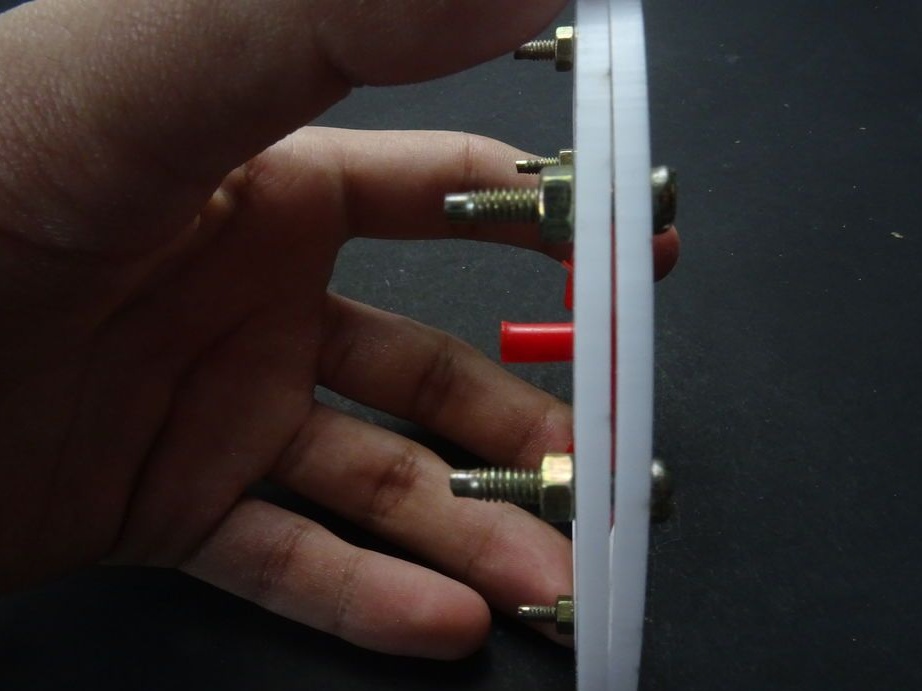
Pe șuruburi colectează două jante. Șuruburile nu sunt complet strânse.




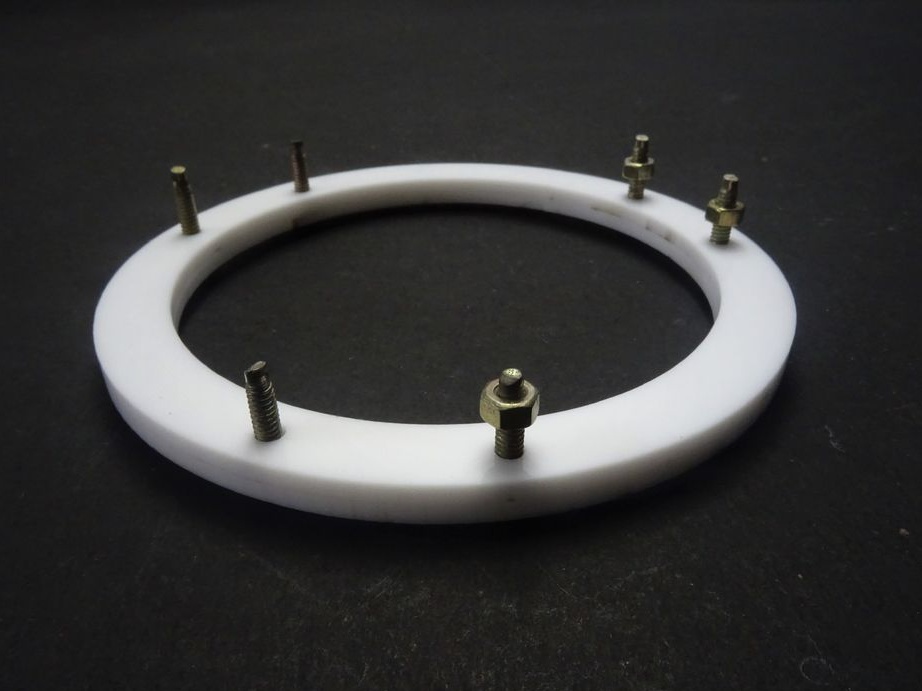
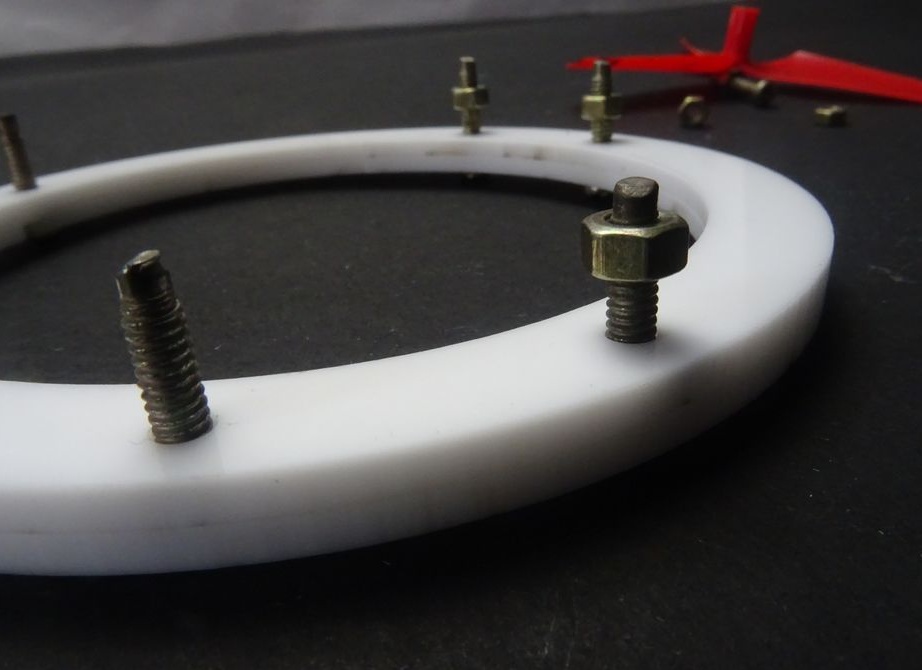
Între discuri instalează șuruburi și strânge șuruburile. Când instalați șurubul, trebuie să utilizați șablonul pentru a-l centra.
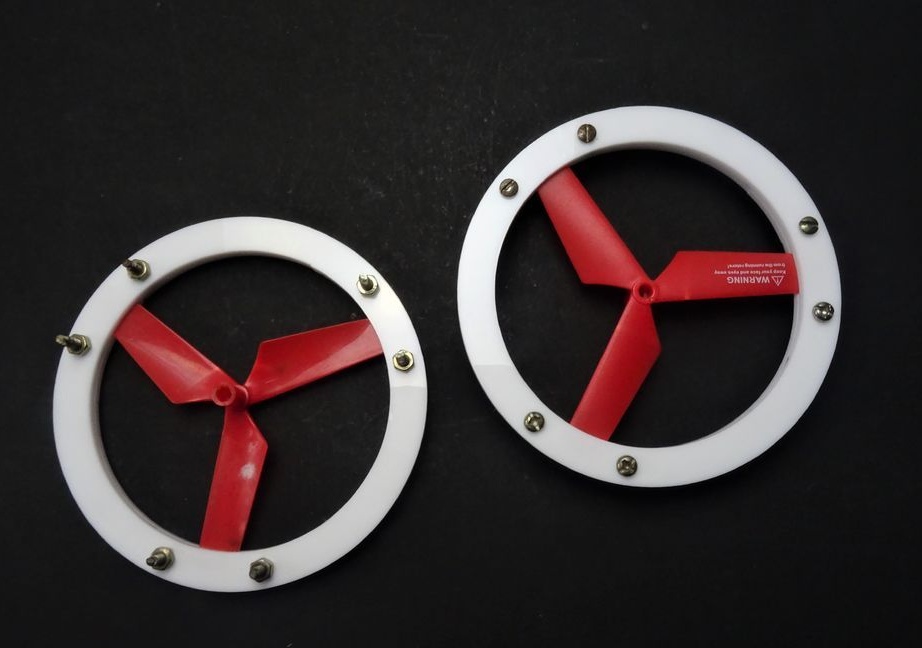
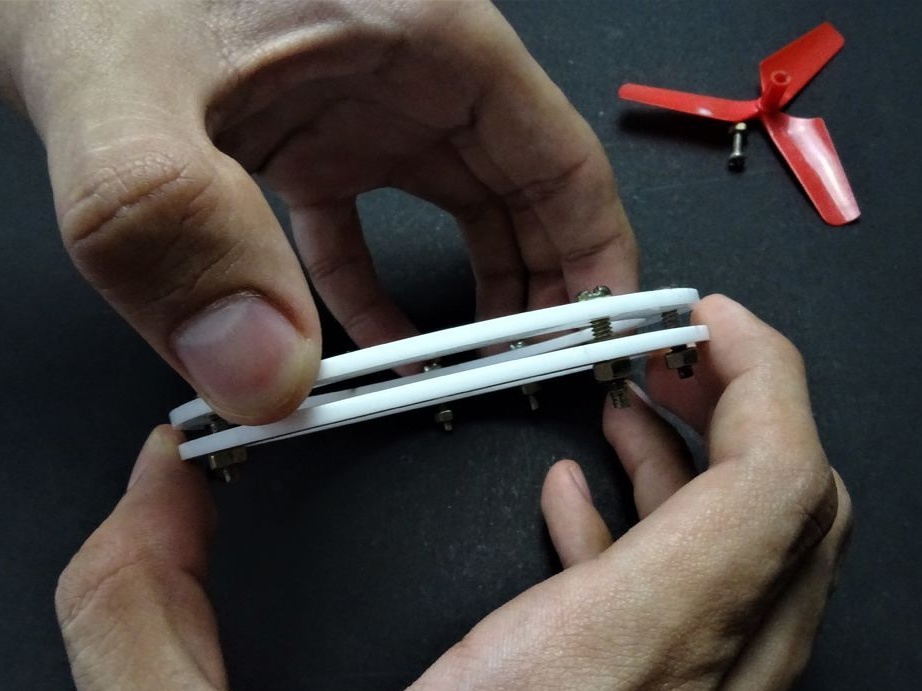
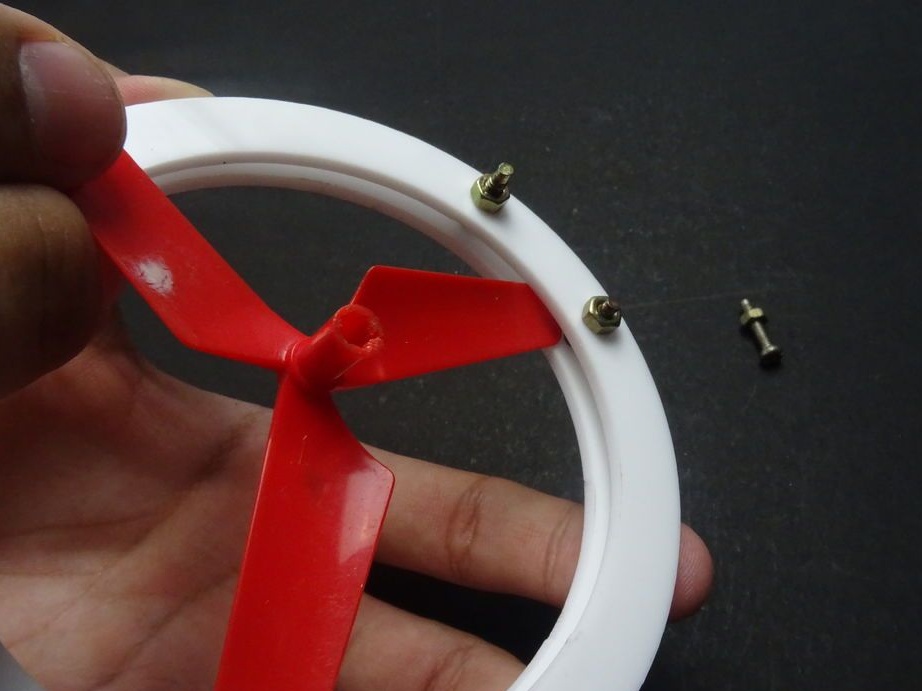
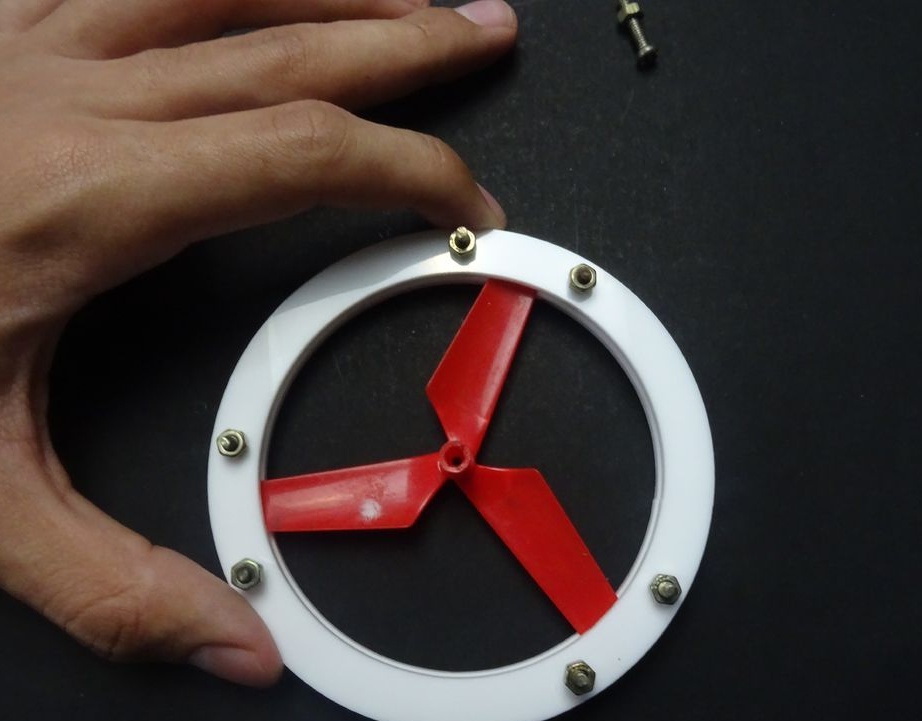

Setează marginea exterioară a roții. Janta trebuie să fie plină cu discul intern.
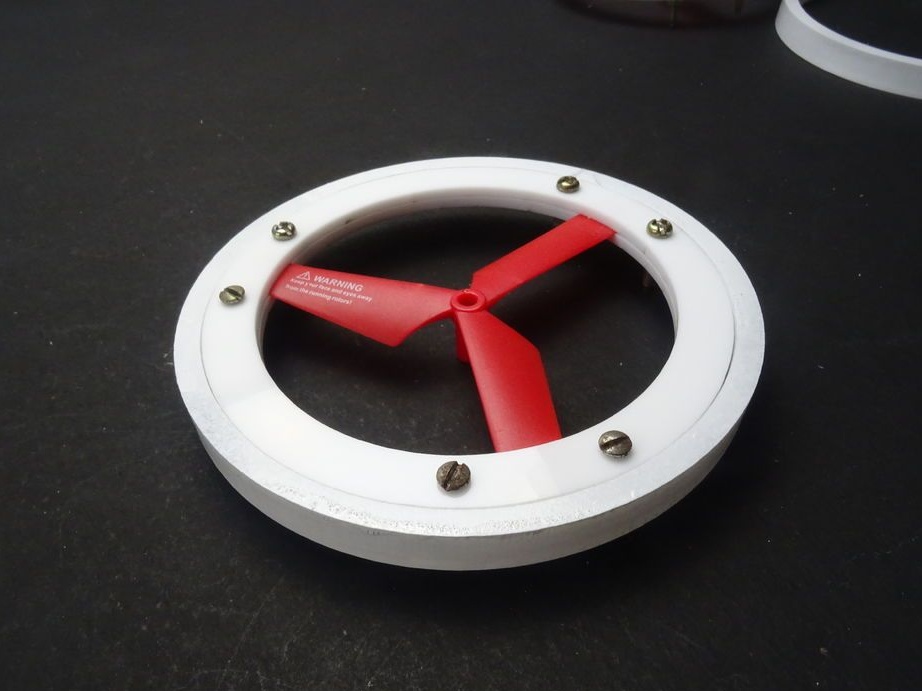

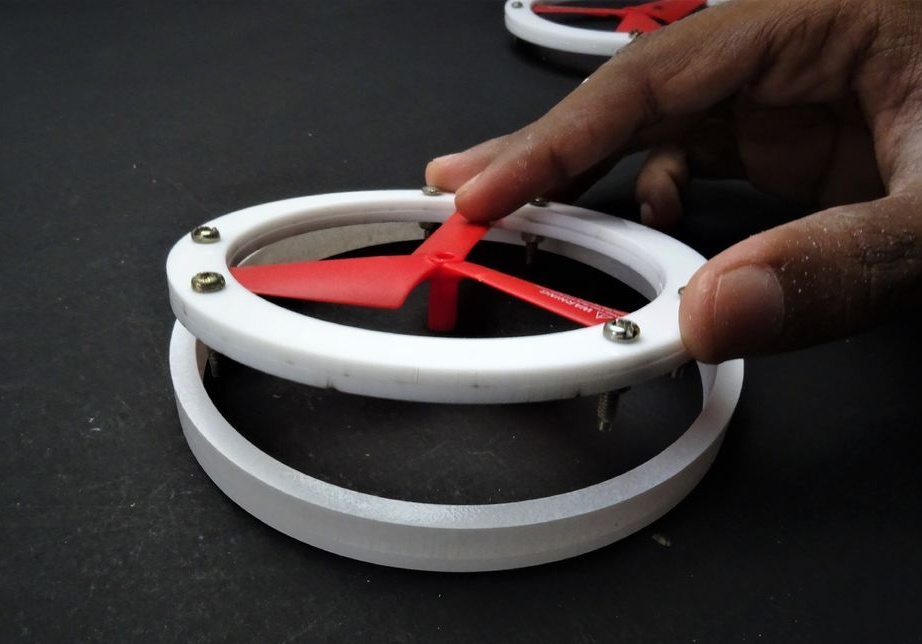
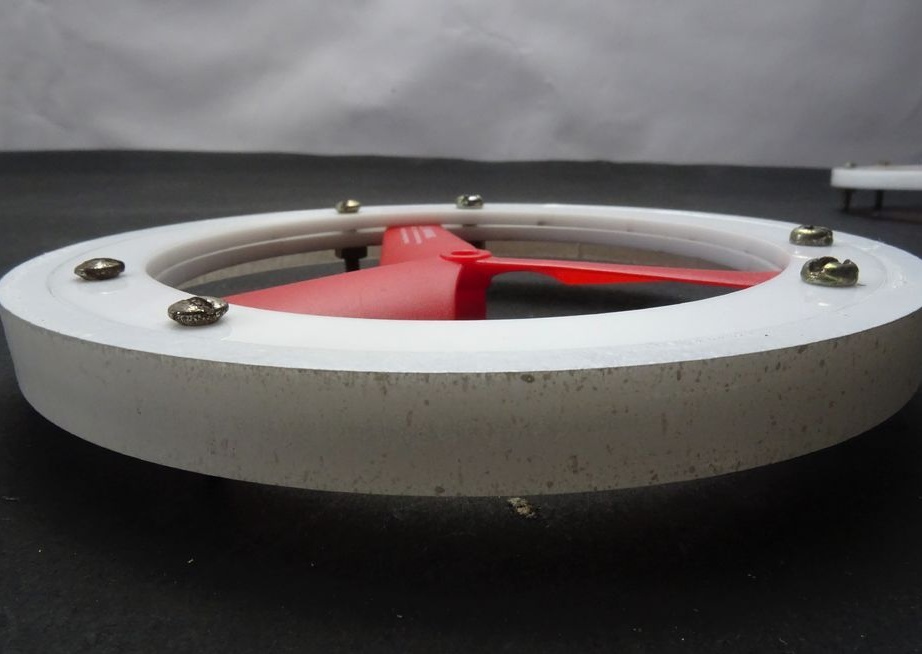

Aplicați lipici fierbinte pe articulație.


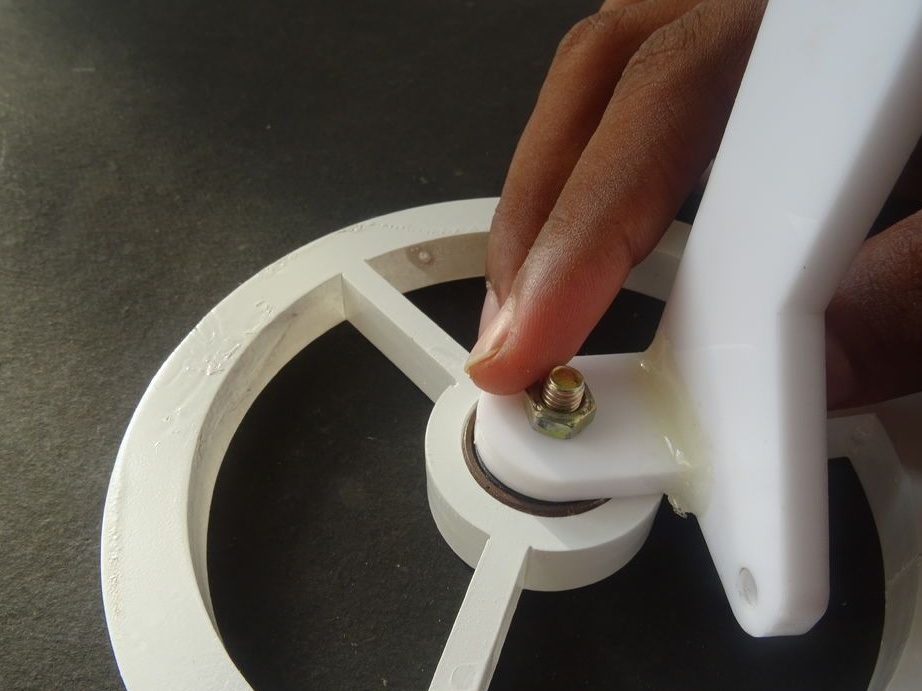
Acum colectează roțile din față.
O piuliță de dimensiuni adecvate se înfundă în cursa interioară a rulmentului. Apasă rulmenții în roțile din față.



Roțile sunt gata.

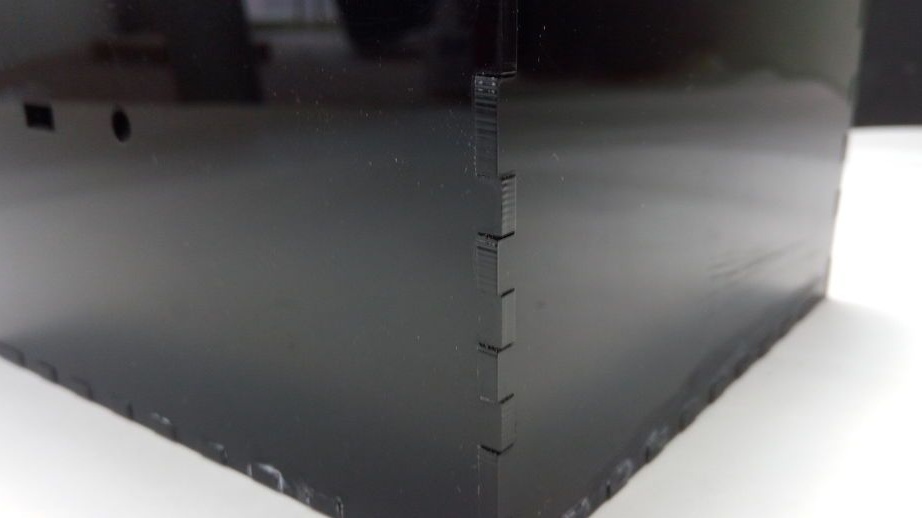
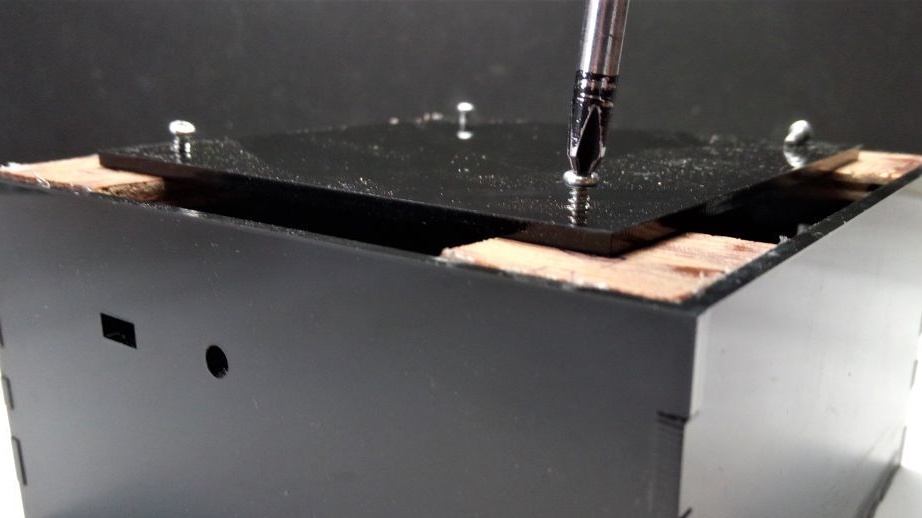
Pasul 12: Carcasă electronică
Lipeste carcasa electronica.
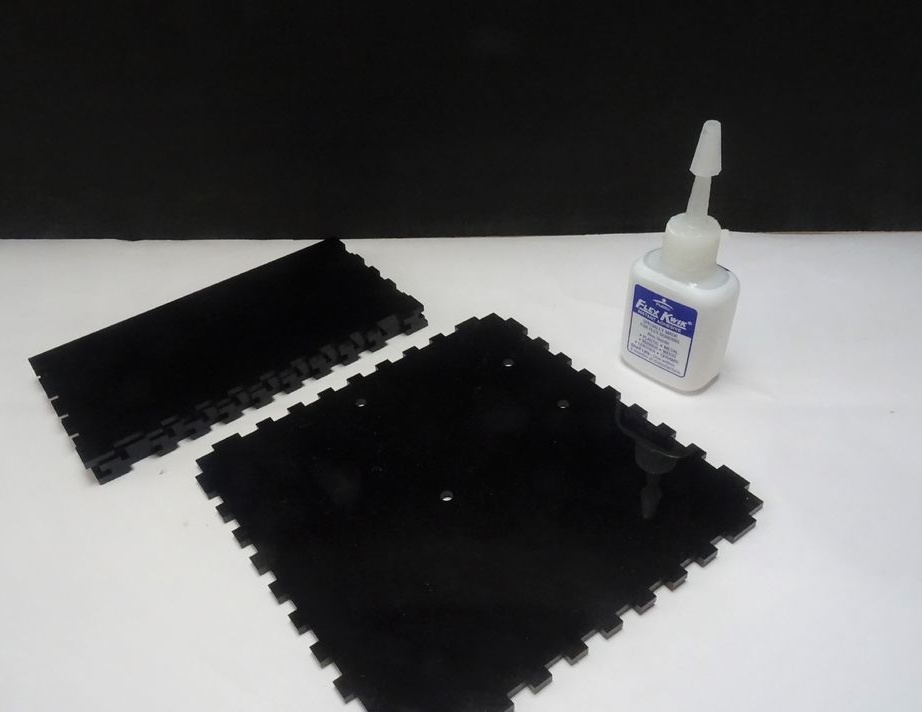
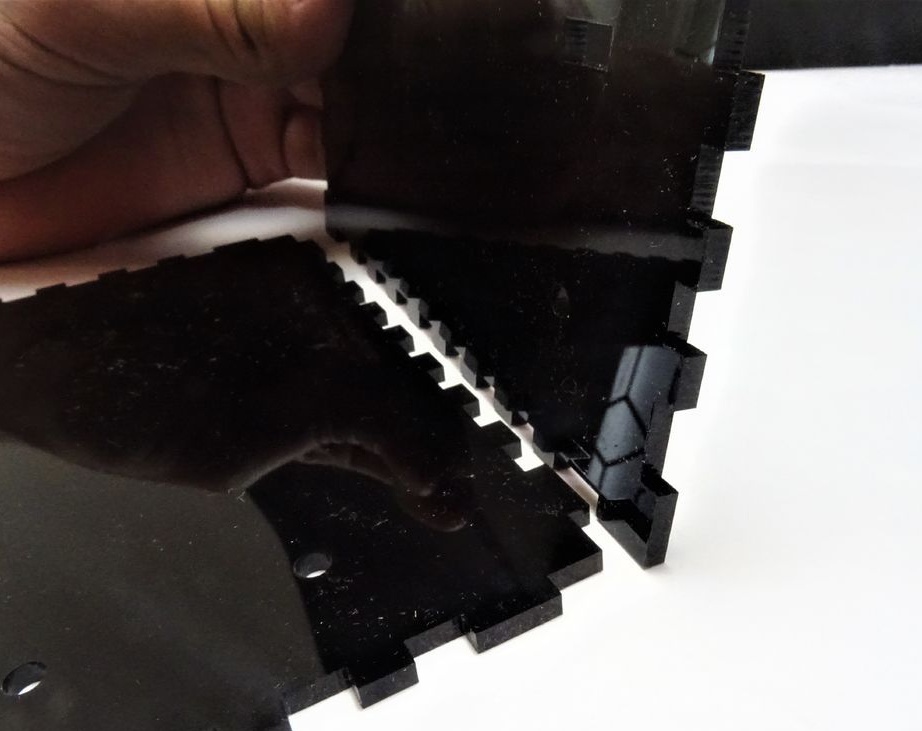

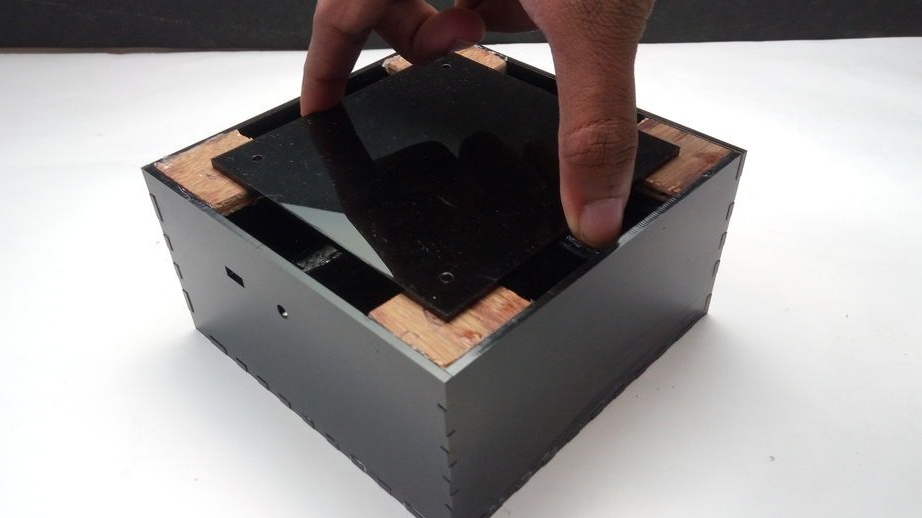
Această casetă va conține totul electronic componente, ceea ce înseamnă că trebuie să fie impermeabilizată cât mai bine.


Patru pătrate sunt tăiate și lipite de scândură în colțurile cutiei. Capacul cutiei va fi atașat de ele.



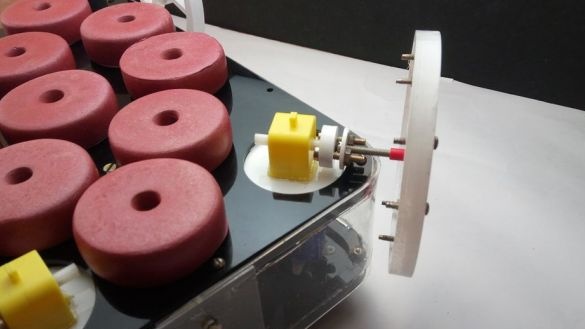
Pasul treisprezece: montura pe roți
Acum trebuie să conectați roțile și angrenajul cu un ambreiaj.





Înșurubați roțile din față pentru a trage.


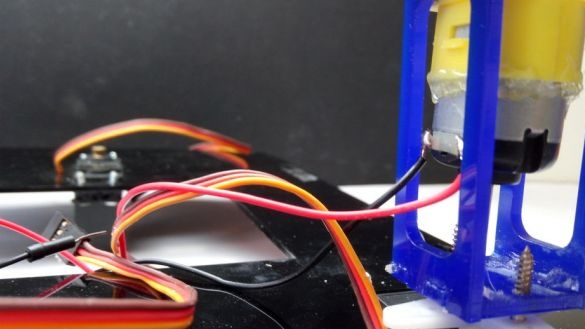
Pasul al patrulea: conectați electronica
Conform schemei, instalează piese electrice.
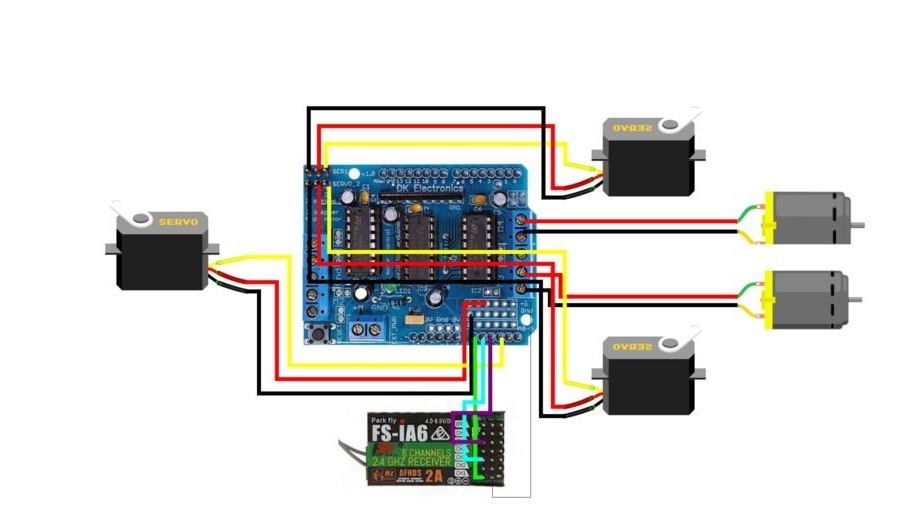

Firurile motorului din stânga la M1, dreapta la M2. Conectează un driver de motor. Conectează servos-uri. Instala receptorul: gnd al receptorului pentru gnd Arduino; +5 V receptor la +5 V Arduino; pinul 3 până la A0; pinul 1 până la A1; pinul 5 până la A2. Conectează bateria.
Pasul cincisprezece: descărcați codul
Mai întâi trebuie să descărcați biblioteca.
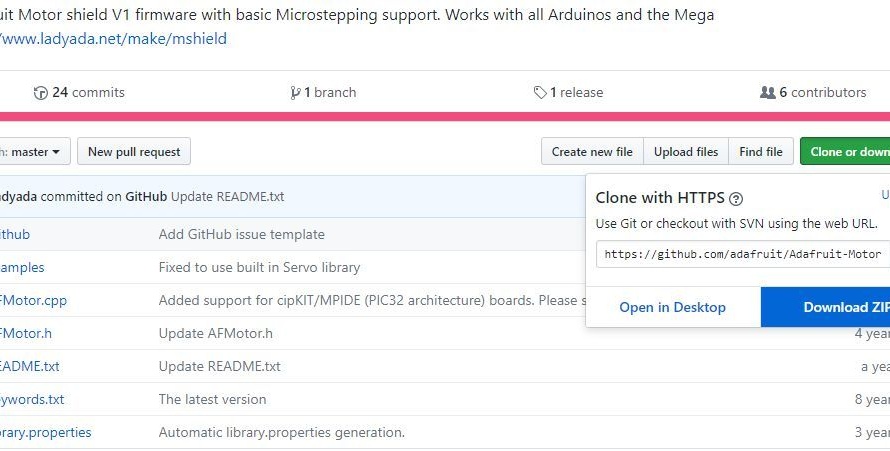
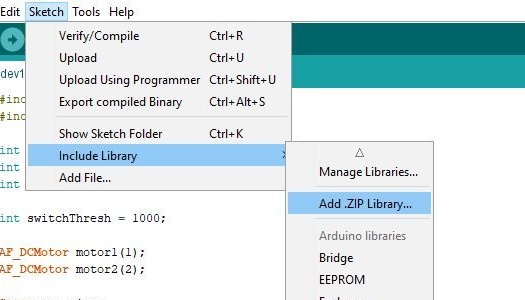
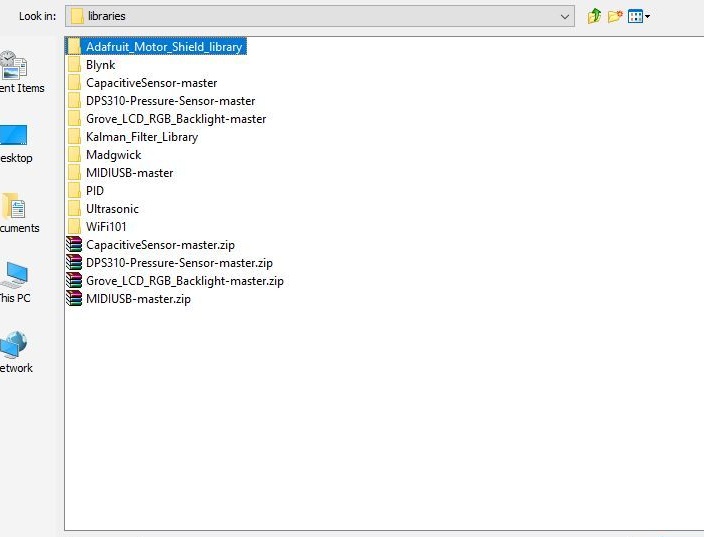
Apoi, descărcați codul. La încărcare, bateria trebuie deconectată.
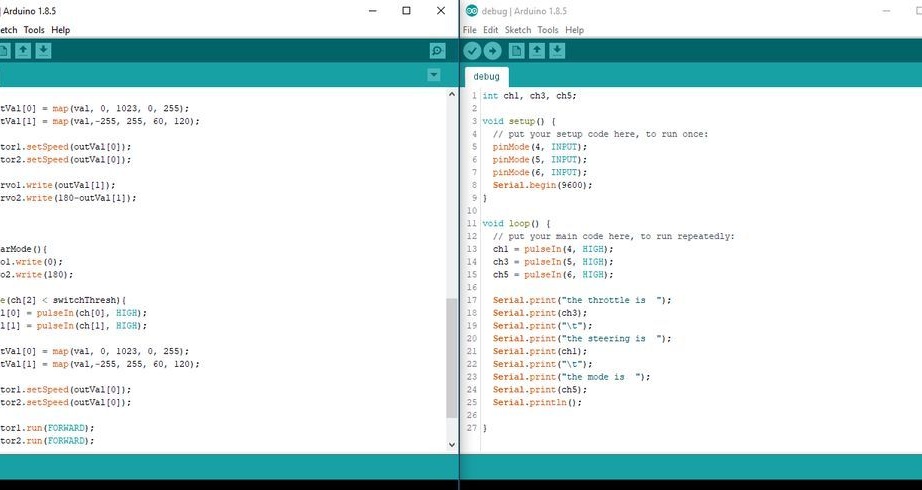
Descărcați codul de mai jos.
amphibious_rover_code.ino
După descărcarea codului, verifică funcționarea motoarelor și a acționărilor.
Pasul șaisprezece: asamblare
Acum este timpul să asamblați vehiculul pe tot terenul.
[centru[/ centru]
Instalează servos-uri. Instalează motoare cu viteze.

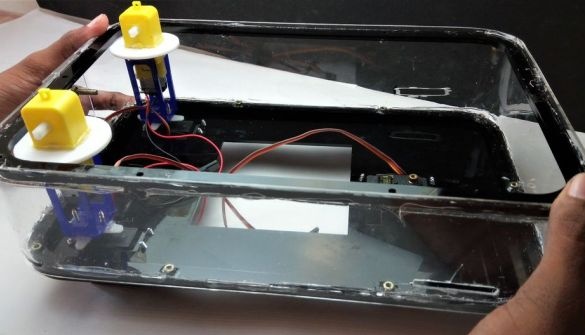
Fixează roțile. Răsfoiește ambele jumătăți ale corpului.






Totul este gata și acum puteți testa.