Mersul lui este foarte asemănător cu un gandaci adevărat. Când mergeți, se balansează un pas cu încredere înainte. Gandaciul are un minim de piese complexe și este foarte ușor de fabricat.
1. Test video
Videoclipul prezintă un gandaci mecanic din diferite unghiuri în timpul funcționării și mișcării sale.
2. Caracteristici și caracteristici.
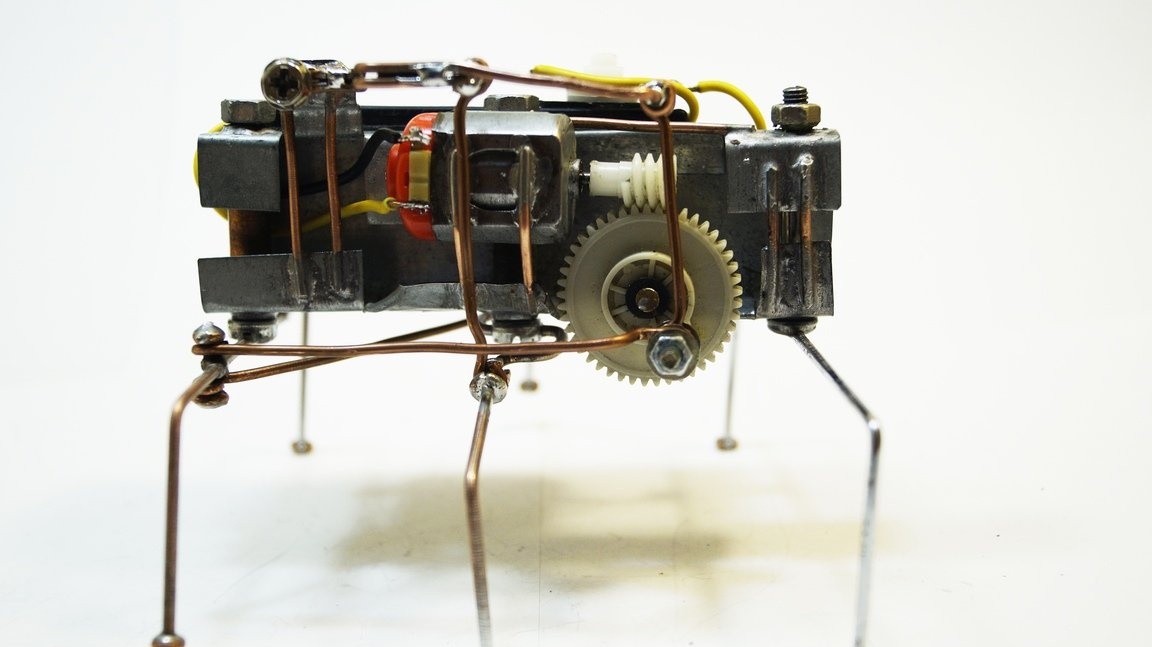
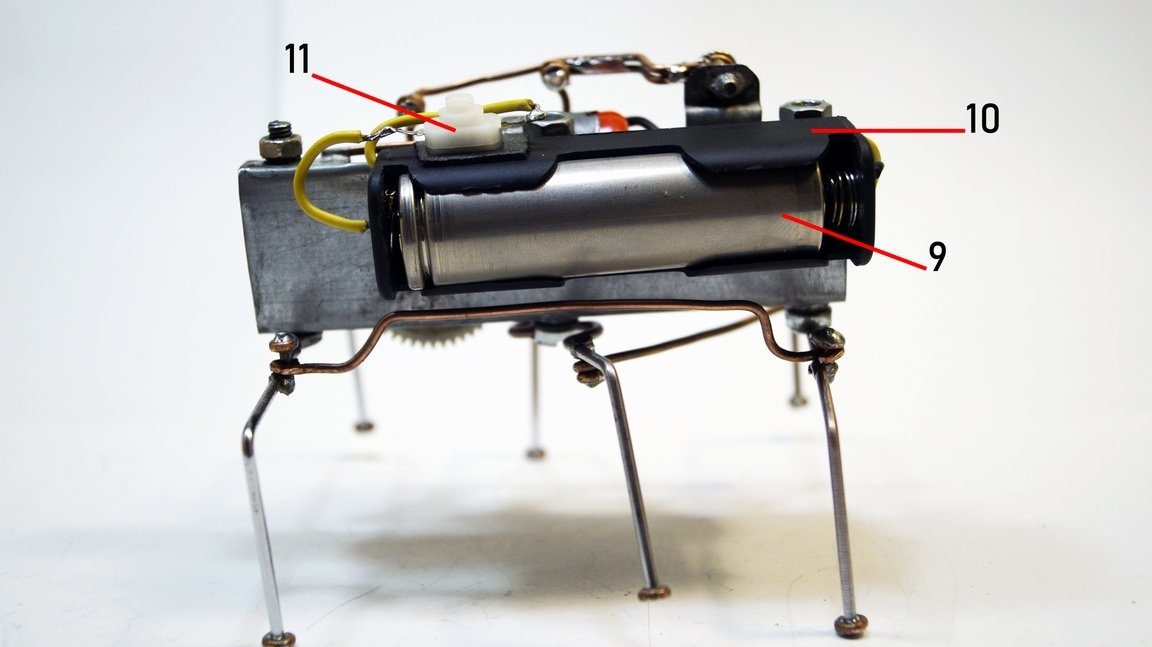
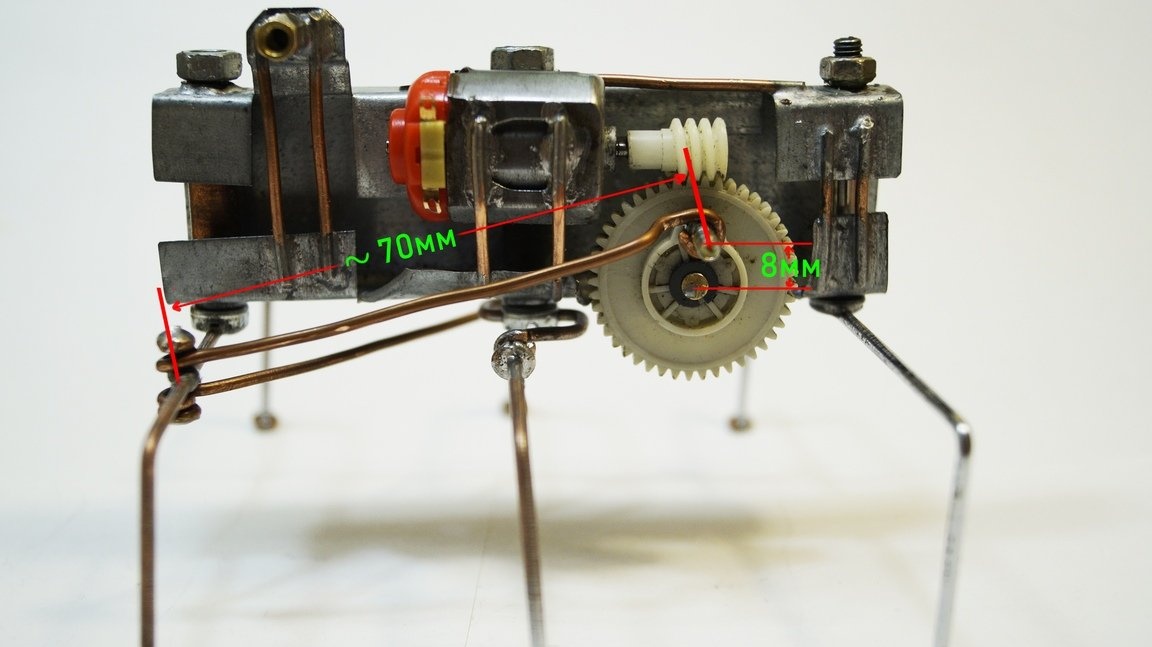
Pe o fotografie 1. S-a afișat gandașa mecanică, vedere laterală. Pe o fotografie 2. Este afișată imaginea de sus.
Foto 1.
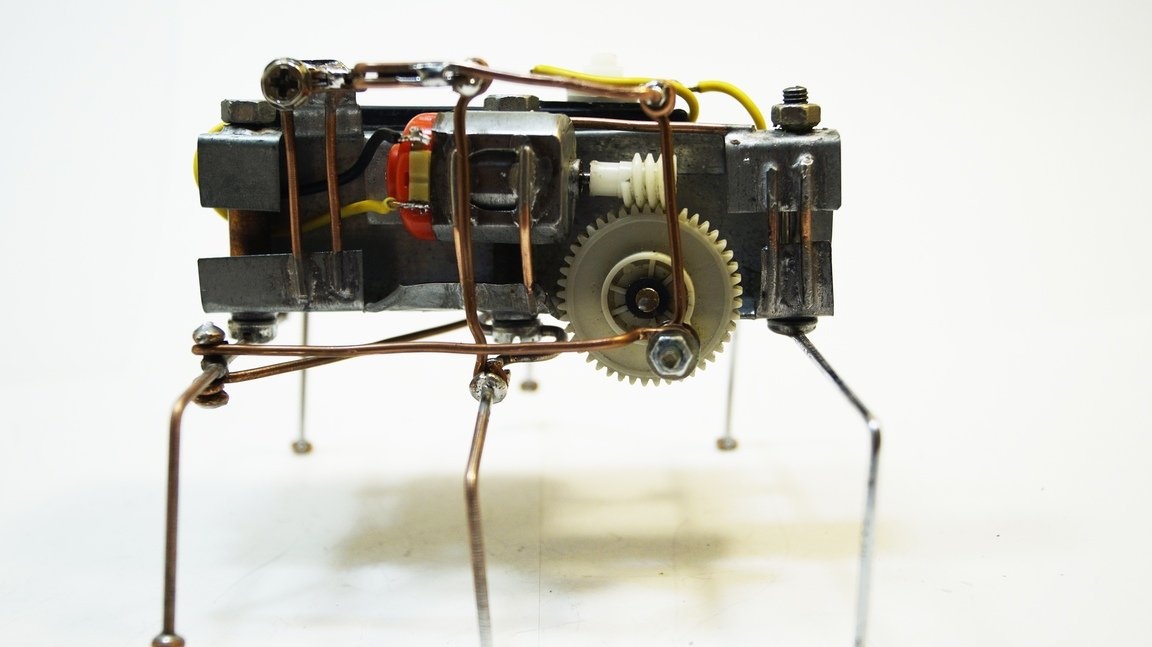
Foto 2.
CONSTRUCȚIE. Ca cadru, a fost utilizat profilul ppn-2 30X20. Motorul și alte articulații au fost montate prin lipire. Labele unei gandaci sunt fixate cu șuruburi M6. Butonul de alimentare și compartimentul bateriei sunt lipite pe banda dublu. Ca tracțiune pentru conducerea picioarelor unui gandaci, a fost utilizat un cablu de cupru cu o secțiune de 2,5 mm.
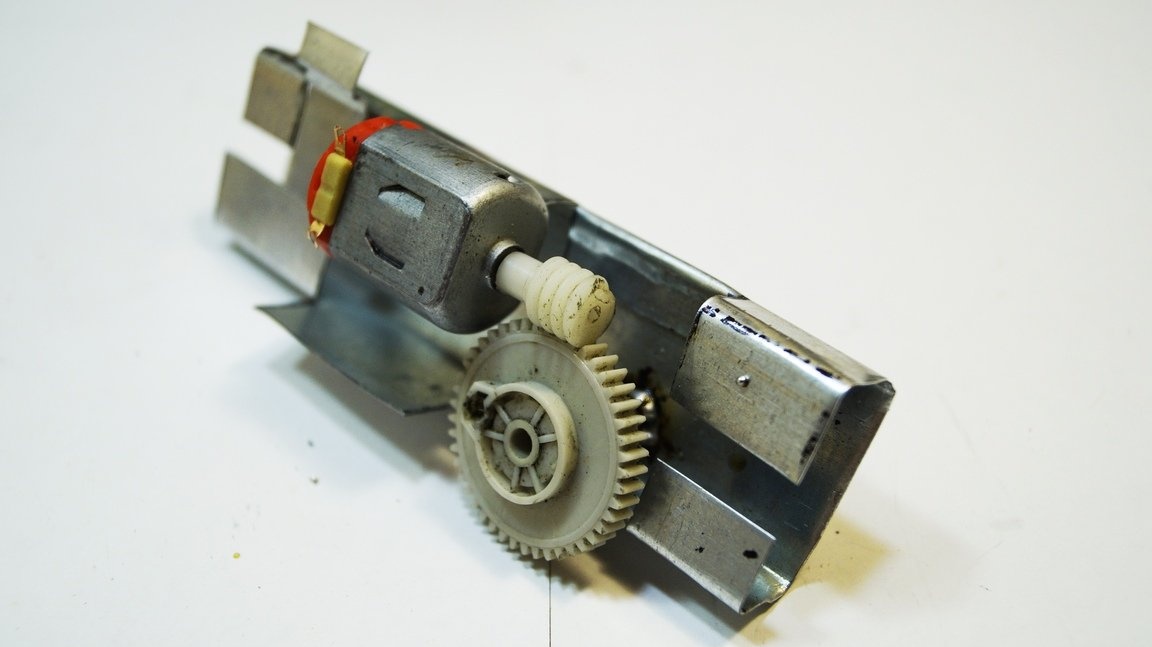
MOTOR ȘI CRĂCIUNI. Motorul și axa manivelei sunt lipite pe cadru pe POS-61, acid de lipit ZnCl (clorură de zinc). Pentru a crește cuplul și a reduce dimensiunea, s-a folosit un angrenaj cu vierme.
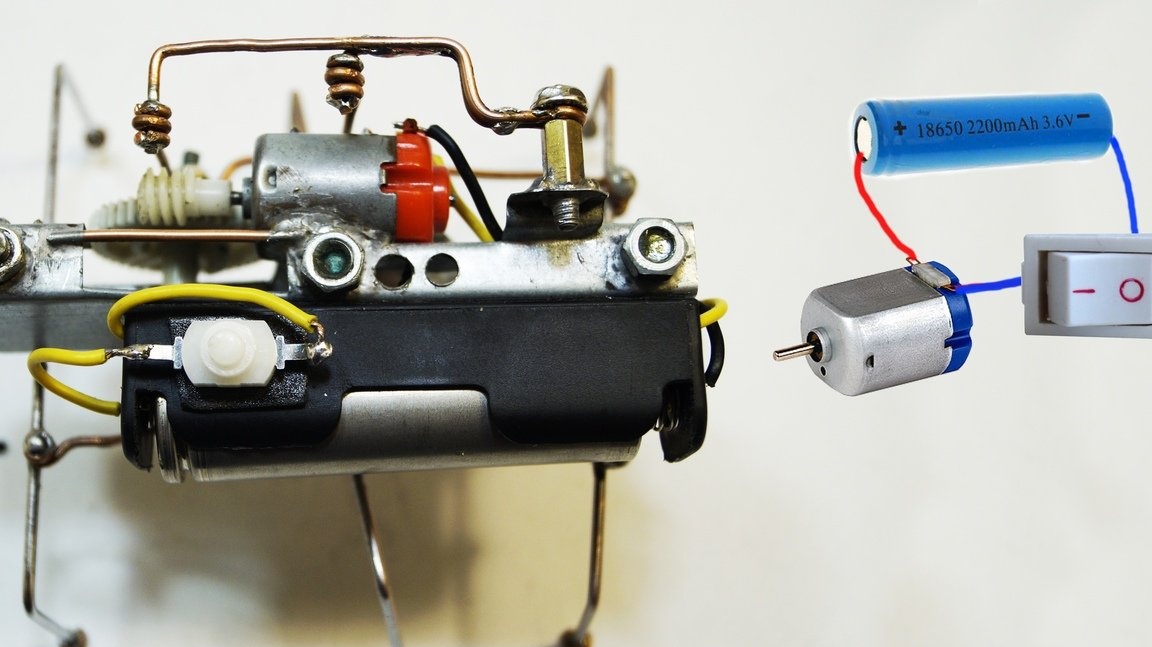
POWER. Ca putere a robotului a fost utilizată o baterie 18650. Sursa de energie este de 3.7V.
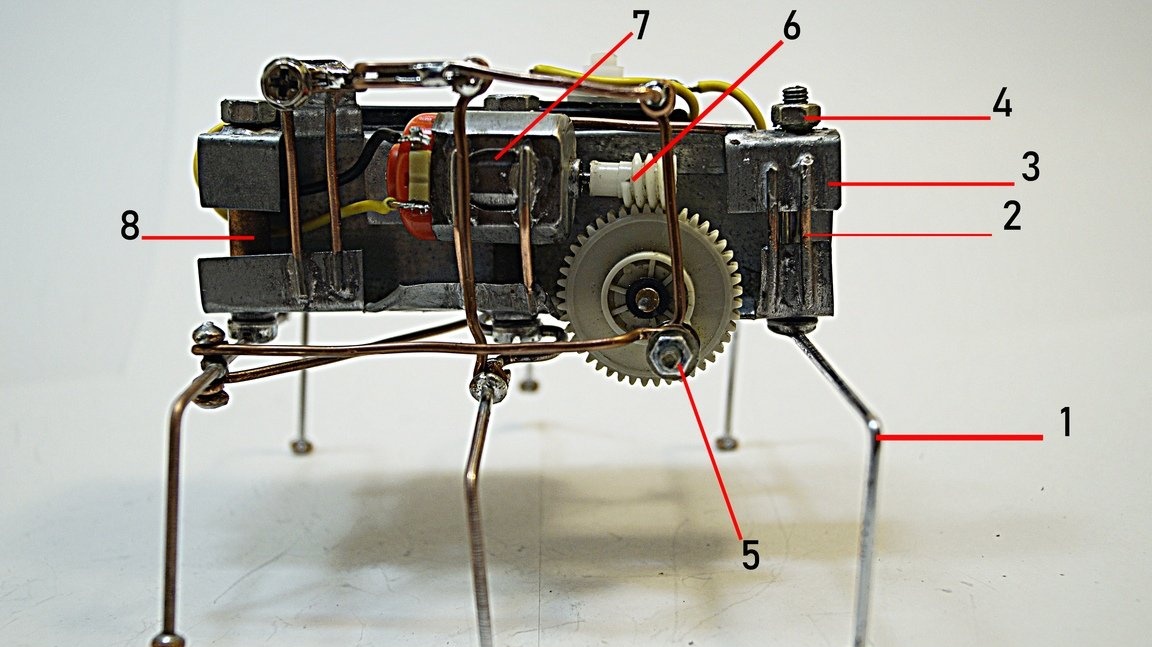
DETALII DE PROIECTARE ROBOT
1. Labele unui gandaci.
2. Ridificatorul.
3. Cadrul.
4. Axa labelor unui gandaci.
5. Mecanismul manivelei.
6. Unitatea de vierme.
7. Motor electric F130 5 V.
8. Axa de mânecă a labei gandacii.
9. Baterie tip 18650, 3,7 V.
10. Compartimentul bateriei.
11. Buton de pornire.
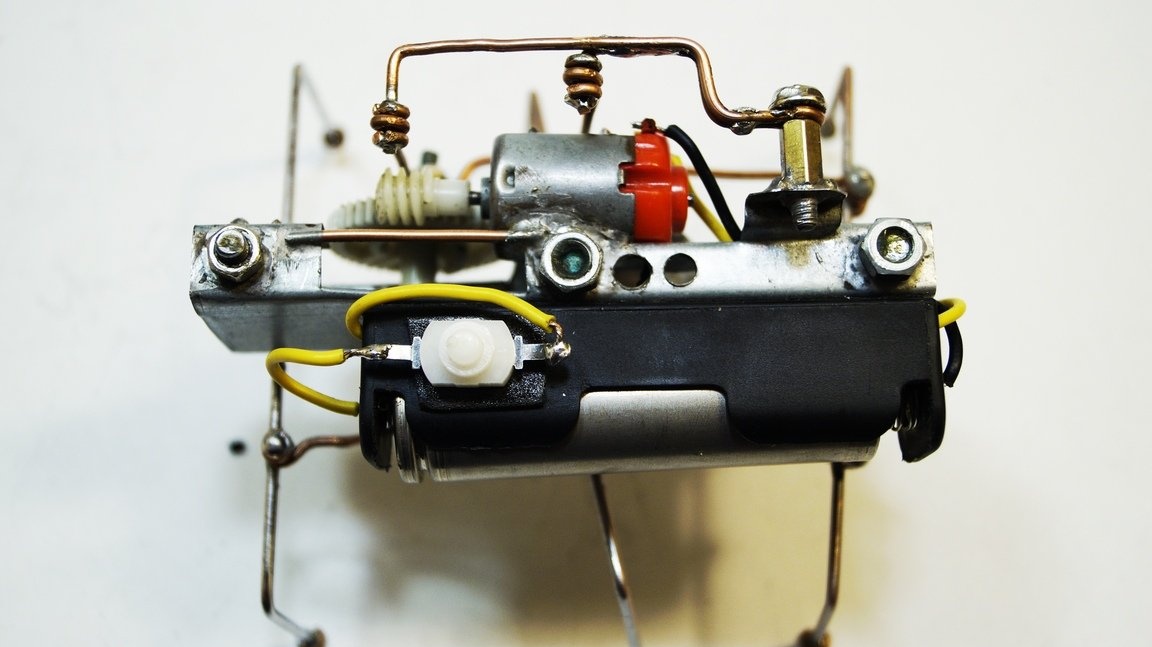
3. Principiul muncii.
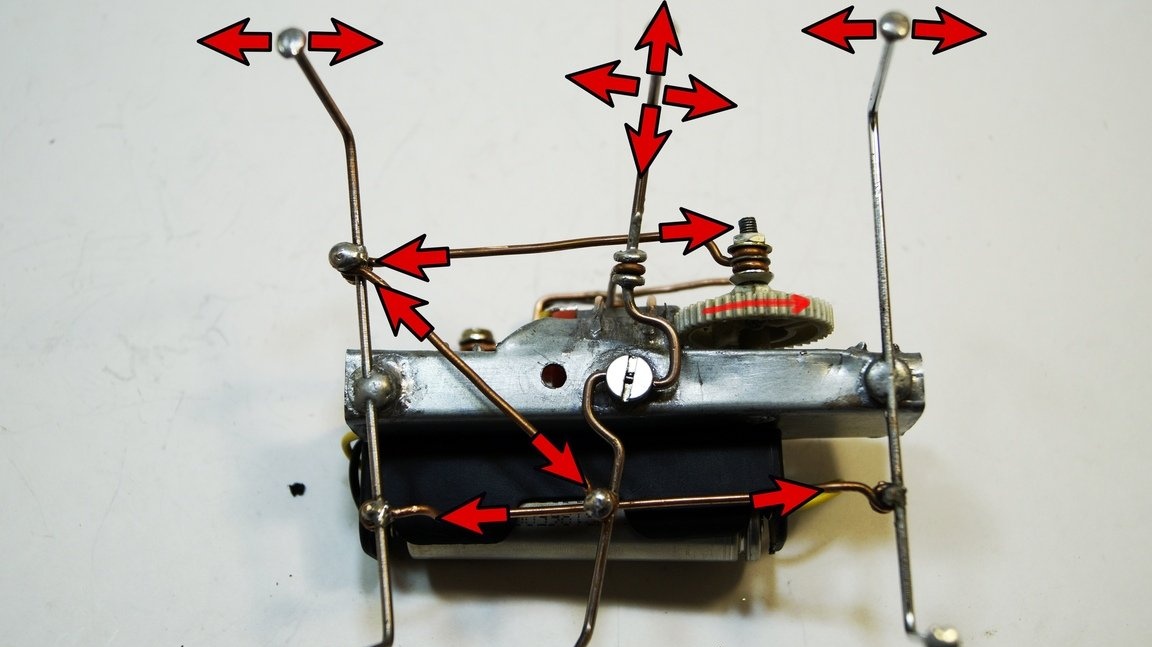
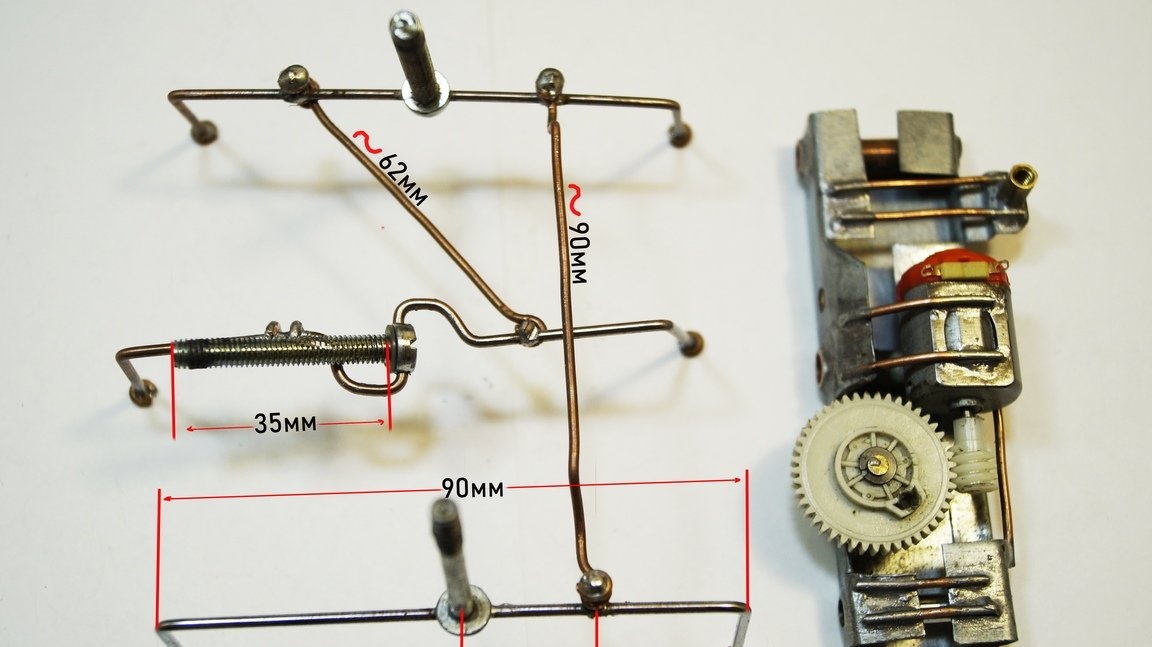
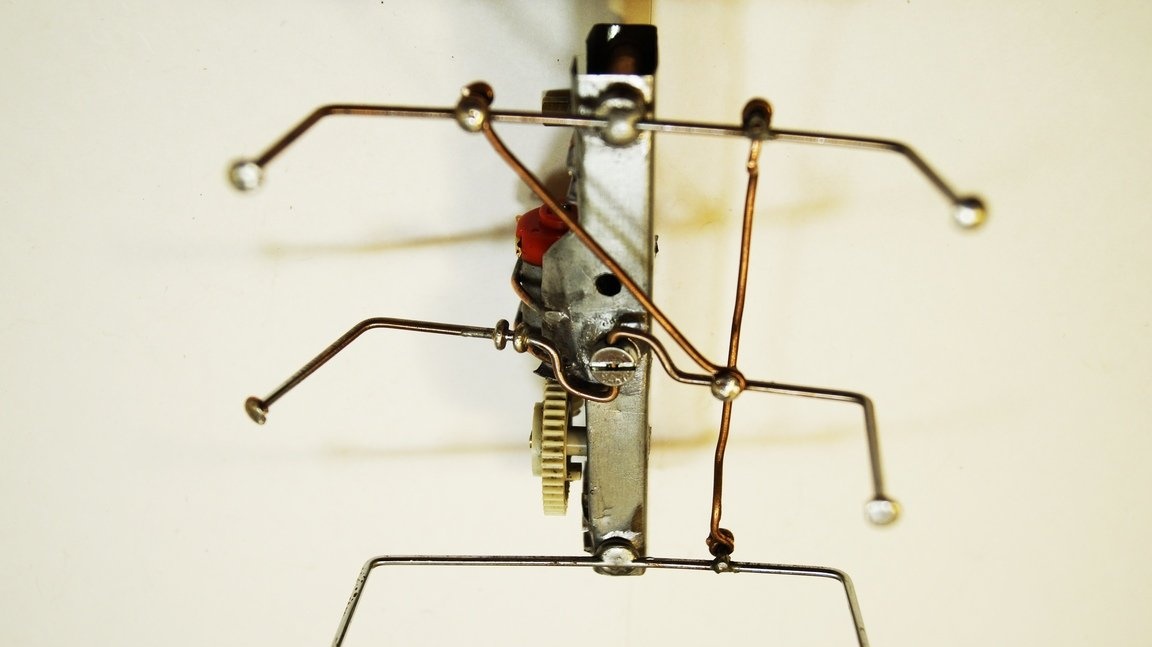
Pe o fotografie 3. 4. Este prezentat principiul de lucru al pieselor mecanice ale unui gandaci. Merită să ne amintim că picioarele din față și din spate ale robotului se mișcă orizontal, iar picioarele din mijloc se mișcă vertical și orizontal.
Puterea electrică este furnizată motorului electric prin cheie, motorul rotind mecanismul manivelei. Manivela conduce laba anterioară prin tracțiune, respectiv, din laba din față, împingerea împinge laba din spate (se mișcă sincron). Perechea mijlocie de labe este conectată la prima pereche, în sens transversal (se mișcă în antifază).
Pentru a muta perechea mijlocie de labe vertical, o levieră este montată deasupra motorului, care se pune în mișcare de la mecanismul manivelei.
Foto.3
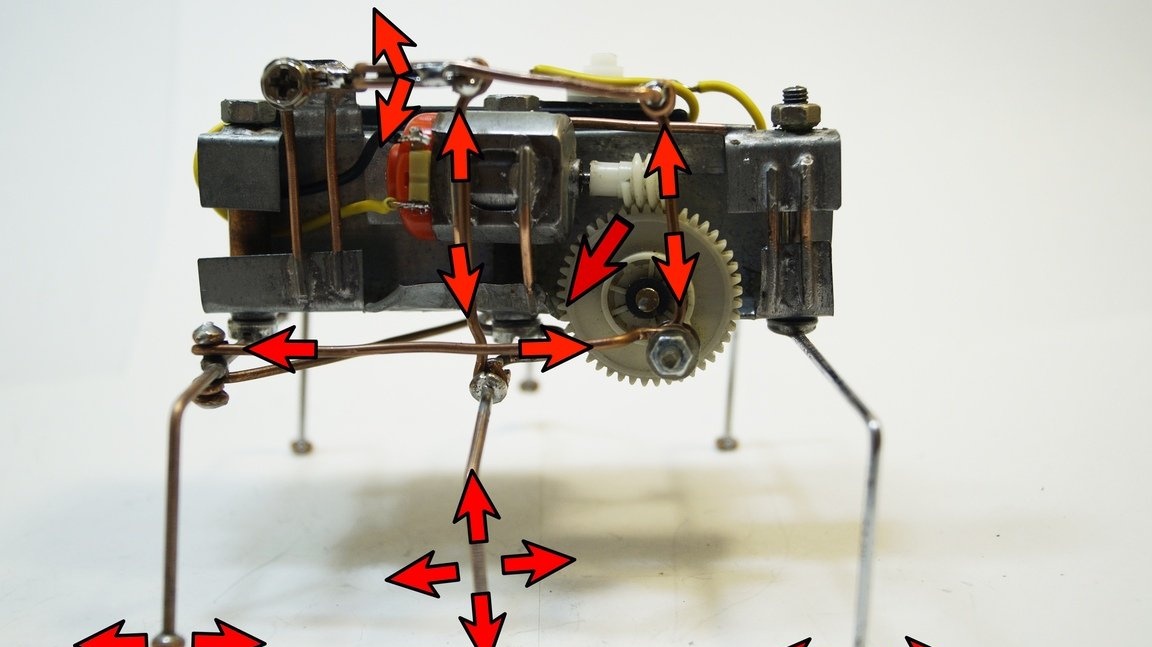
Foto.4
4. Materiale și instrumente.
1. fier de vânzare 50W.
2. Compartimentul bateriei.
3.Prysoy POS-61.
4. Un fir de cupru cu o secțiune de 2,5 mm.
5. Acidul de lipit ZnCl (clorură de zinc)
6. Motor electric F130 5V.
7. Foarfece pentru metal.
8. Unitatea de vierme.
9. Clesti
10. Tub de oțel, diametru 80mm.
11. Baterie reîncărcabilă 18650.
12.Profil PPN-2 30X20.
Și, de asemenea: (buton de alimentare, bandă dublă față, fir de montare)

5. Instrucțiuni de asamblare.
1. Realizarea unui cadru de gandaci.
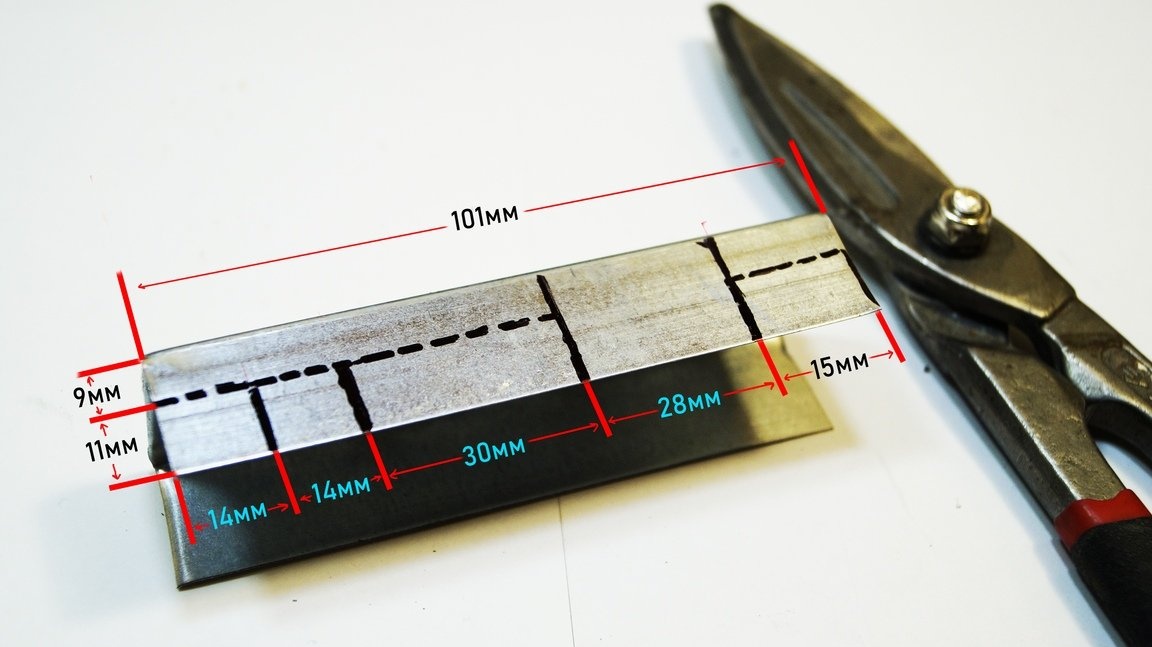
Desenați marcajul pe profil, așa cum este indicat în fotografia 5.
Foto 5.
Folosind foarfece pentru metal, tăiem și îndoim piesa de prelucrat cu un clește așa cum se arată în fotografia 6. Marcați partea inferioară, așa cum este indicat în fotografia 6. Îndoiți profilul cu un clește ca în fotografia 7.
Foto 6.
Foto 7.
2. Motor electric și axul manivelei.
Următorul pas este de a lipa motorul electric pe cadru. Motorul înainte de lipire va trebui demontat. Inundăm carcasa motorului și cadrul cu un fier de lipit Foto 8.
Am sudat carcasa motorului electric și cadrele, încălzind bine piesele cu o fieră de lipit, apăsându-le reciproc Foto 9. FIE ATENȚIAL, DETALII ÎNCĂLZIȚI MULȚI !!!
Foto 9.
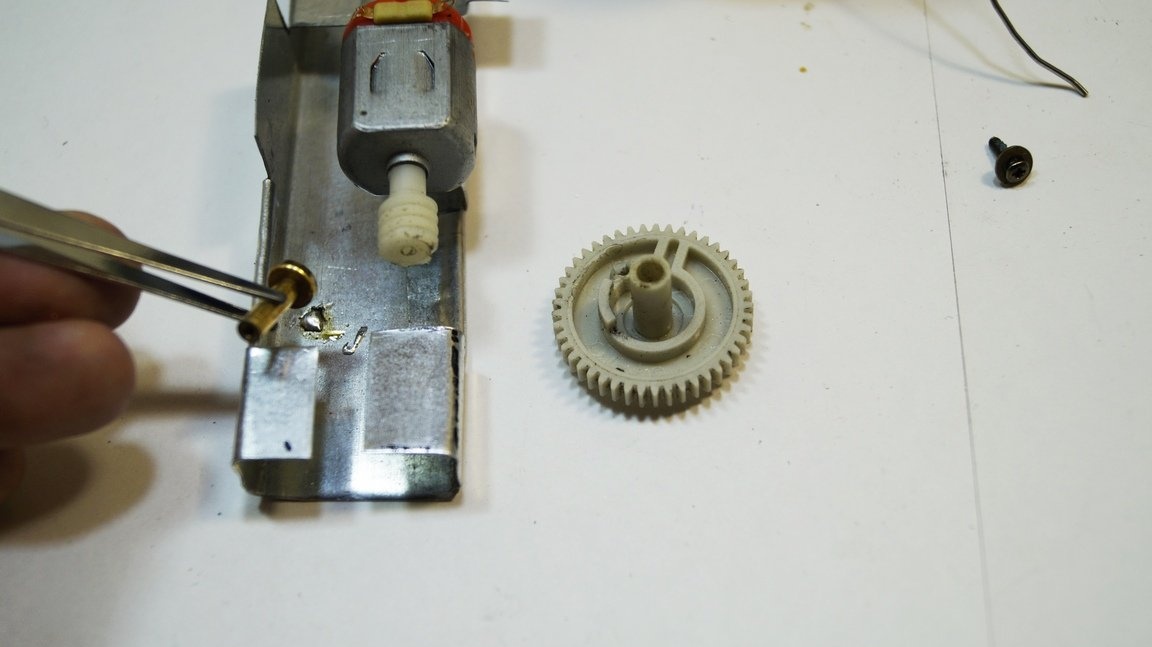
Punerea motorului electric înapoi. Am sudat axa manivelei în loc, aceasta se face experimental. Angrenajele pentru viermi trebuie să fie bine montate între ele, angrenajele nu trebuie să fie înclinate.
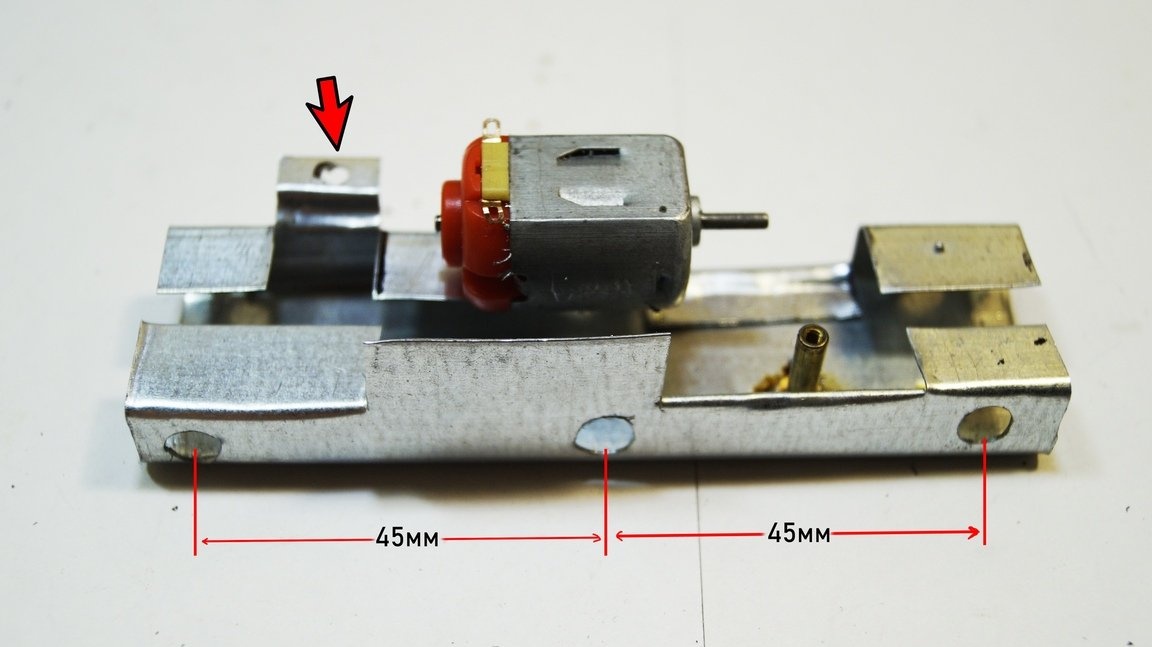
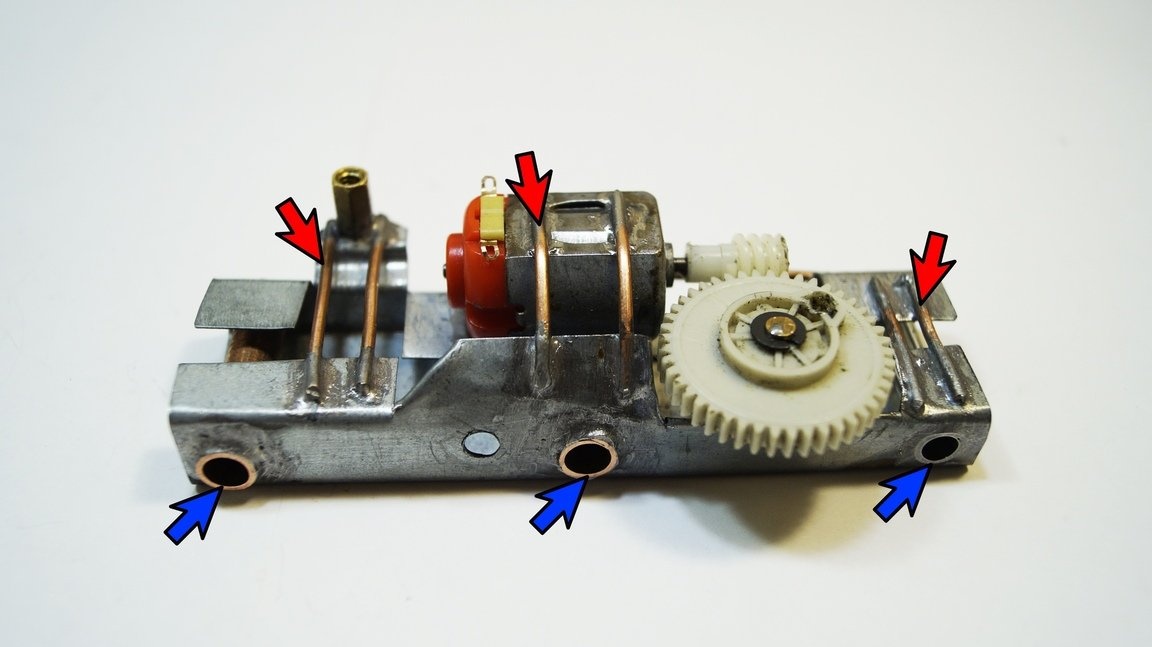
3. Găuri pentru picioarele unui gandaci.
Pentru a fixa labe de gandaci pe cadru, trebuie să găuriți găuri cu un burghiu de 8 mm. Foram o gaură în ureche în spatele motorului electric cu un burghiu de 3,2 mm
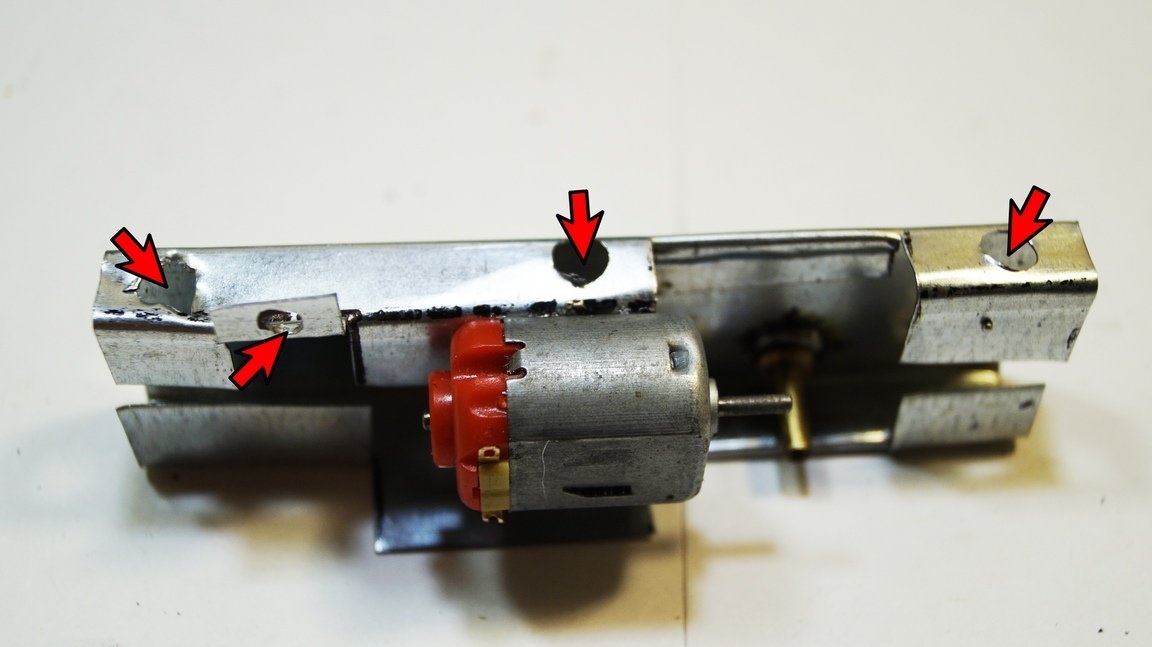
De asemenea, am lipit o piuliță în ureche în spatele motorului electric. Pârghia responsabilă pentru ridicarea labelor de mijloc de-a lungul axei verticale va fi fixată la această piuliță
Pentru a consolida designul cadrului, rigidizoarele au fost lipite cu un fir de cupru de 2,5 mm.
Bucse de 8 mm au fost, de asemenea, lipite la punctele de atașare ale labei gandacii Foto 15.
4. Labe ale unei gandaci.
Sârmă metalică cu diametrul de 3 mm a fost folosită ca labe de gandaci, este lipită pe capul șurubului M6 Foto 16. Perechea mijlocie de labe de gandaci este realizată diferit, o gaură este găurită în capul bolțului de-a lungul diametrului sârmei. Firul se apleacă sub forma literei „S”, ceea ce va permite picioarelor gâtuciului să se miște vertical.
Foto 16.
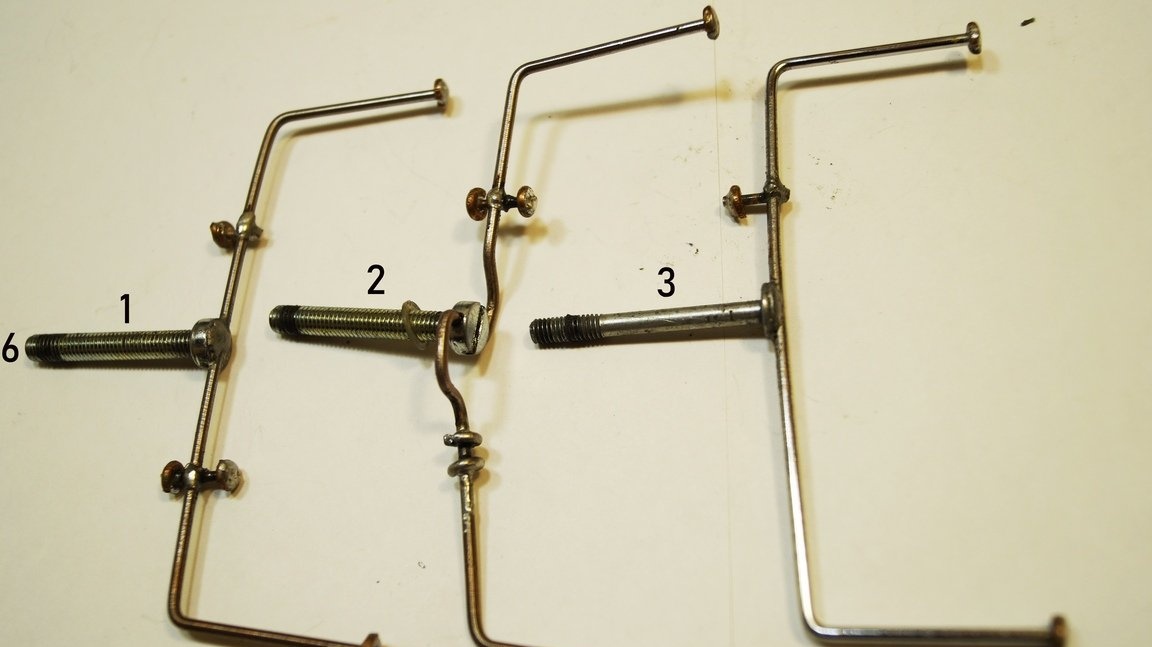
Foto 17.

Pentru a fixa tijele, un fir de cupru cu o secțiune de 2,5 mm lungime de 12 mm este lipit pe labele gâtușii, inelele de cupru sunt lipite la capetele sale. Tijele sunt realizate din sârmă de cupru cu o secțiune transversală de 2,5 mm, dimensiunile sunt aproximative, este recomandat să îndoiți sârma, astfel încât în viitor să existe posibilitatea reglării de-a lungul fotografiei 18.
Fotografia 19 prezintă o vedere de jos, cu labele montate pe cadru.
Stabilim tracțiune de la mecanismul manivelei până la picioarele din față ale gandacii. Facem o tâmplă cu tiv pentru capacitatea de a-l regla. Raza manivelă 8mm Foto 20.
Realizăm o pârghie pentru deplasarea labei din mijloc pe verticală din sârmă de cupru Foto 21.22.
Aceasta completează partea mecanică a gandacii.
Foto 21.

Fotografia 22 arată locația labelor în poziția inferioară a arborelui mecanismului manivelei.
Foto 22.

5. Partea electrică.
Lipiți compartimentul bateriei pe o bandă cu două fețe pe cadrul gâtui. Lipiți butonul de pornire din compartimentul bateriei. Am sudat toate elementele din Foto 23.
Robotul - gandaciul este gata !!!