







Conceptul principal al acestui proiect este că, cu ajutorul diferitelor unde cerebrale, utilizatorul va putea controla robotul, cursorul de pe computerul său sau poate aprinde / opri luminile din casa sa, în timp ce microcontrolerul (Particul Photon) creează o analiză online a undelor cerebrale ale utilizatorului. Deci da, cu acest dispozitiv puteți utiliza cu adevărat Puterea Gândirii
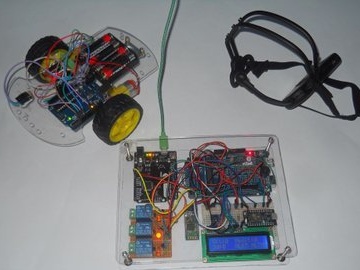
 ... Acest dispozitiv nu este destinat doar leneșilor sau fanilor, ci a fost creat pentru a le oferi oamenilor oportunitatea. care se luptă în fiecare zi cu handicapul lor. Robotuldezvoltat de autor funcționează la fel ca un sistem de scaune cu rotile acasă automatizarea va ajuta utilizatorul să controleze lumina sau televizorul, chiar dacă nu se poate mișca. Modul controler PC poate fi util chiar și pentru cei care sunt complet sănătoși.
... Acest dispozitiv nu este destinat doar leneșilor sau fanilor, ci a fost creat pentru a le oferi oamenilor oportunitatea. care se luptă în fiecare zi cu handicapul lor. Robotuldezvoltat de autor funcționează la fel ca un sistem de scaune cu rotile acasă automatizarea va ajuta utilizatorul să controleze lumina sau televizorul, chiar dacă nu se poate mișca. Modul controler PC poate fi util chiar și pentru cei care sunt complet sănătoși. Cum funcționează?

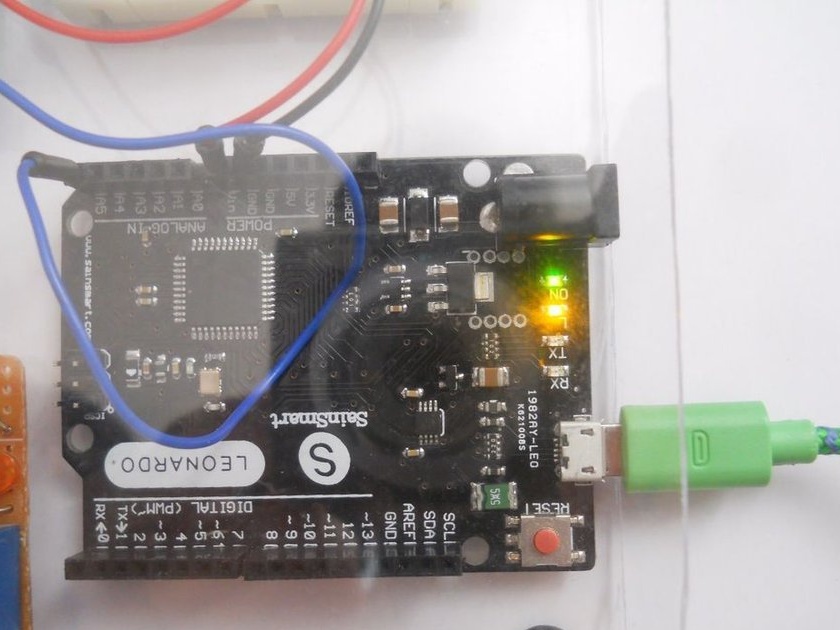
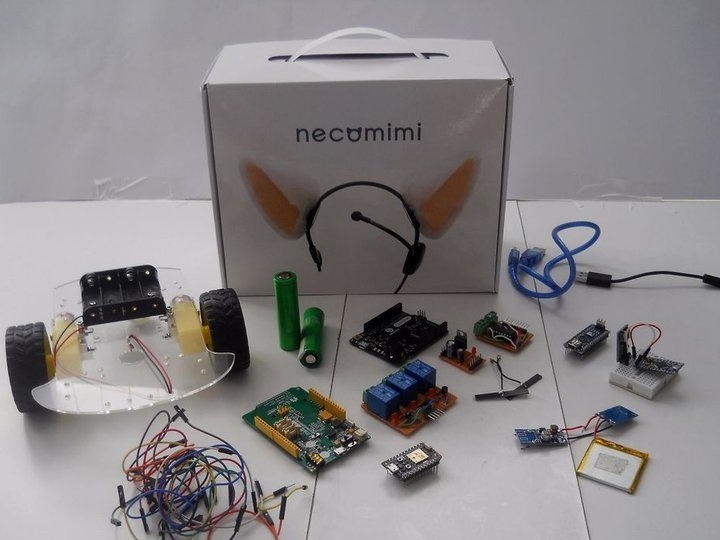
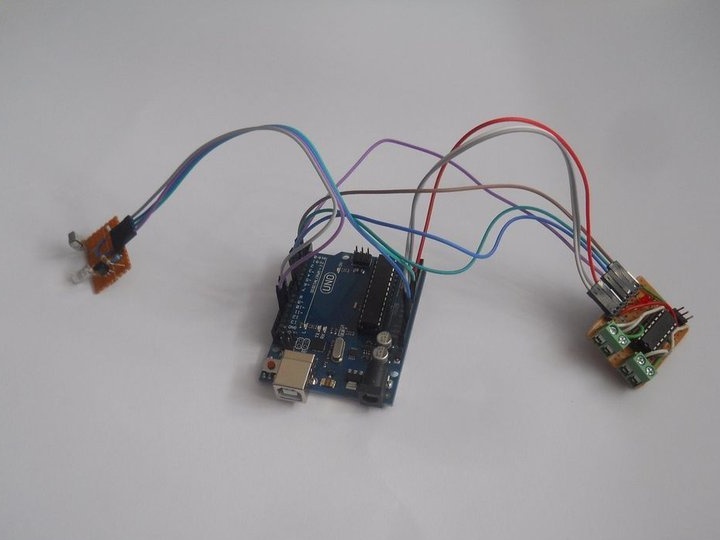
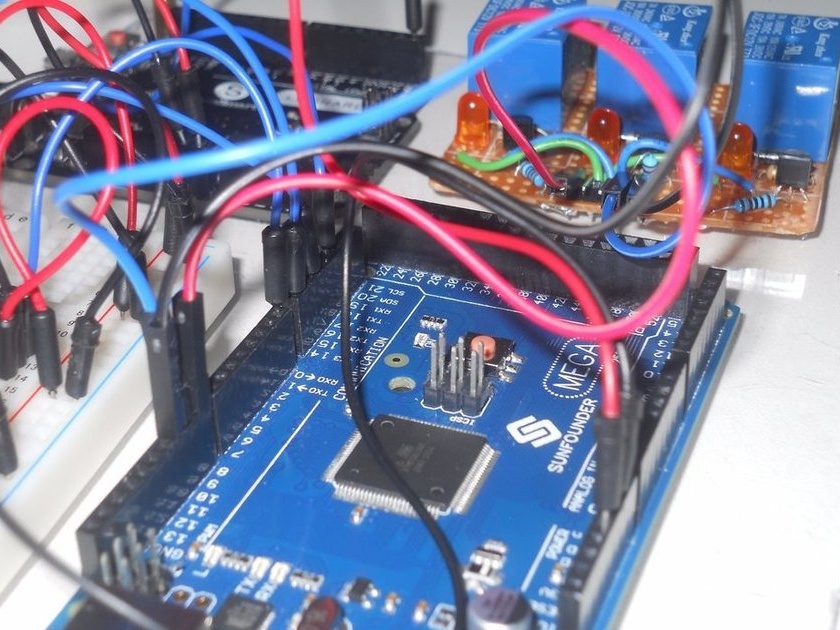
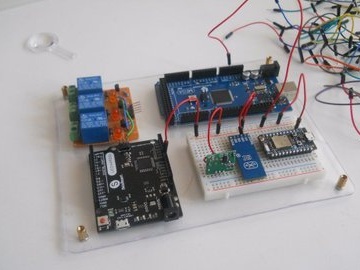
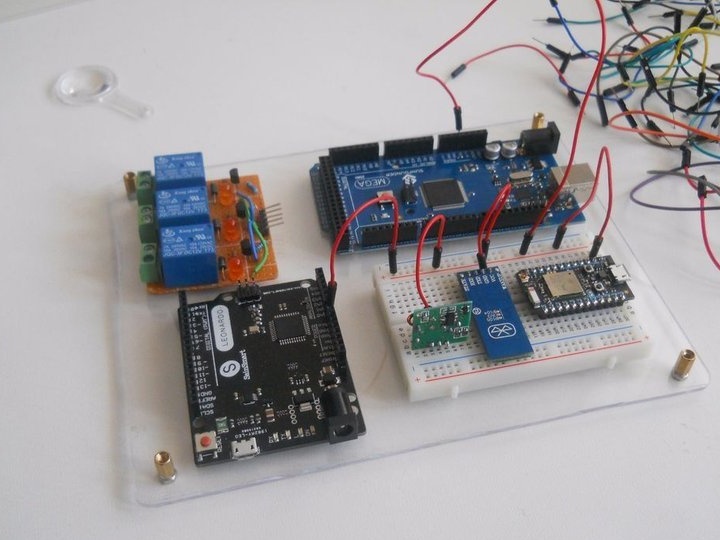
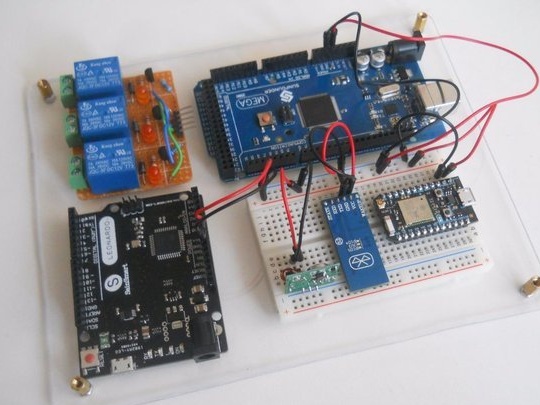
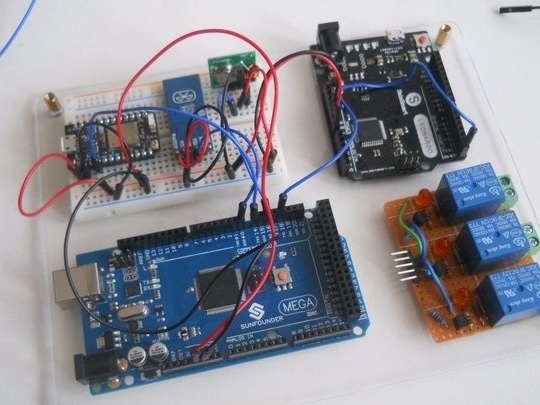
Patru microcontrolere au fost folosite pentru a aduce viața acestui proiect: Arduino Mega, Arduino Leonardo, UNO și Particul Photon. Mega este creierul proiectului, care primește semnale de la căști, analizează și trimite comenzi către alte dispozitive. Transmite toate datele către Particule Photon, care creează un server web. Leonardo controlează mouse-ul pe un computer, iar Uno este folosit pentru a primi IR (semnale infraroșii) și pentru a controla robotul. Un dispozitiv este capabil să controleze trei dispozitive diferite (sau mai multe dacă doriți să programați altceva). Mai departe, aceste trei dispozitive diferite vor fi numite canale. Dispozitivul comută între aceste canale dacă închideți ochii:
Închideți ochii timp de 1-2 secunde: treceți la funcția de automatizare a locuinței
Închideți ochii timp de 2-4 secunde: treceți la modul controler robot
Închideți ochii timp de 1-6 secunde: treceți la modul de control al mouse-ului
Pentru a face funcția de automatizare la domiciliu, la care puteți conecta orice: un televizor, becuri, prize, orice doriți, relee au fost utilizate
Pentru percepția undelor cerebrale - Necomimi, care vă poate mișca urechile în funcție de undele creierului dvs. (atenție, meditație). În interiorul unui cip mic care citește undele creierului, filtrează zgomotul și dă un semnal foarte bun. Funcționează cu interfața UART (Serial), deci cu unele hacking-uri putem folosi Arduino pentru a citi undele creierului.Rolul acestui set de căști este acela de a transmite wireless undele creierului către un server central.
Dacă sunteți deja familiarizați cu proiect anterioratunci puteți săriți faza de demontare și remodelare Necomimi.
Coborâți pentru a vedea cum să dezasamblați și să faceți o cască Bluetooth fără fir din el.
Sistem de control al automatizării la domiciliu
Dacă treceți la modul automatizare acasă, creșteți nivelul de atenție peste 70 pentru a porni primul releu, creșteți meditația peste 70 pentru a porni al doilea releu și creșteți ambele valori peste 70 pentru a porni al treilea releu. Este puțin dificil, dar nu imposibil după o anumită pregătire a minții. Dacă releul este deja pornit, folosiți aceeași comandă pentru a-l opri (dacă este pornit, ajungeți la 70 pentru a-l opri). Când sistemul este gata, orice dispozitiv de înaltă tensiune (lumină, TV, computer, ventilator, orice) poate fi conectat la modulul releului.
Controlul mouse-ului
Cursorul este controlat de emoții. Dacă nivelul de atenție este mai mic de 25, se deplasează spre stânga, dacă între 25 și 50 se deplasează spre dreapta, dacă între 50 și 75 urcă și dacă între 75 și 100 coboară. Puteți emite un clic pe butonul mouse-ului prin creșterea nivelului de meditație. Desigur, trebuie să te antrenezi pentru asta.
Controlul robotului
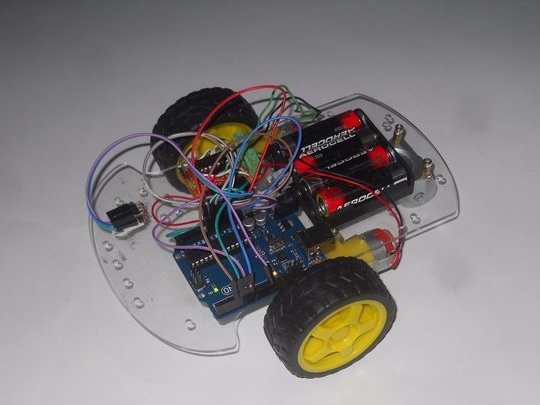
Robotul are doar trei echipe diferite: opriți-vă, virați la stânga și avansați. De ce doar două opțiuni de mișcare? Deoarece aceste două direcții sunt suficiente pentru a muta robotul oriunde. Folosiți-vă nivelul de meditație pentru a roti cu robotul, iar după ce ați ajuns în direcția în care doriți să vă deplasați, opriți robotul, apoi avansați cu nivelul de atenție. Acesta este cel mai bun mod de a controla robotul și chiar și începătorii care nu își pot controla valorile atenției / meditației atât de bine se pot juca cu acest robot.
Căștile transmite semnale BT (Bluetooth) către Arduino Mega, care analizează octeții primiți și, în funcție de gândurile utilizatorului, controlează diverse funcții. La început, autorul a dorit să utilizeze Particle Photon ca transmițător de date, dar acest mic modul a avut un rol în crearea unui server web. A fost cea mai mare modificare din întregul proiect. A folosit și module Arduino de casă, dar puteți cumpăra aceste module online.
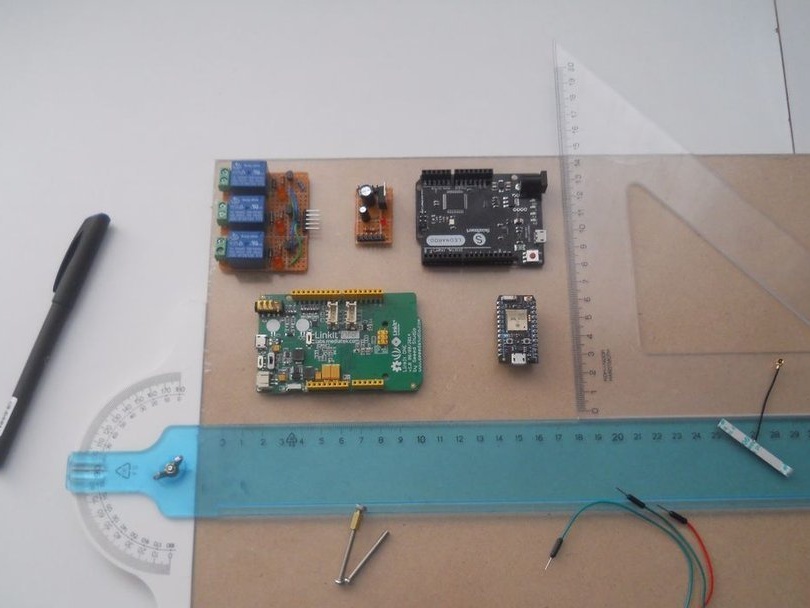
Toate piesele sunt de la GearBest.com. Acesta este un magazin online, la fel ca eBay, dar piesele de schimb sunt livrate mult mai rapid (poate că toate acestea sunt pe aliexpress). Prin urmare, dacă doriți să vă creați propriul regulator de joc, controler robot sau Force Detecto r, începeți prin a cumpăra piese.






Instrumente necesare:
fier de lipit
suda
pistol de lipici
bandă autoadezivă / bandă dublă
stripper de sârmă
freze de sârmă
Echipament:
/ Arduino Nano
Software-ul:
Hacking Necomimi







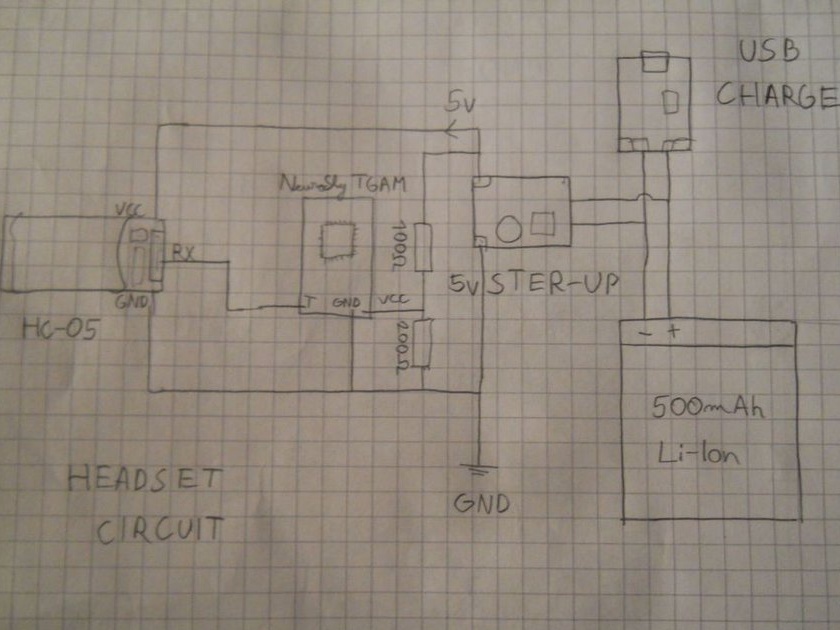
Vrem să modificăm această jucărie EEG pentru transfer de date prin Bluetooth, așa că mai întâi vom dezasambla carcasa. Șuruburile sunt sub autocolant. Scoateți autocolantul și partea din spate a dispozitivului și veți găsi plăci mici în interior. Cel de sub placa principală este cipul Neurosky TGAM. 4 fire din placa principală a microcontrolerului sunt lipite de acesta, așa că luați un fier de lipit și îndepărtați cu atenție acest circuit. Acum lipiți cele trei fire la pinul GND, la pinul VCC și la pinul T. Un pin T este o ieșire a transmițătorului cu o viteză de 57600 baud, care trimite pachete de date la microcontrolerul nostru. După ce ați sudat cele trei fire de mai sus, puteți construi în propria sursă de alimentare reîncărcabilă. Autorul folosește o baterie de ion litiu de 500 mAh, un circuit de încărcător USB, un circuit de impulsuri de 5 V și două rezistențe (100 ohmi și 200 ohmi) pentru a oferi o sursă de alimentare separată de 3,4 V pentru cip și modulul Bluetooth. În fotografie, diagrama conexiunii.
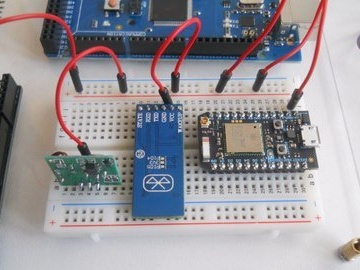
Dacă circuitul este gata, configurați modulul Bluetooth.
Urmați instrucțiunile și cifrele de mai jos și creați-vă propria cască wireless EEG.
Partea cea mai importantă este conectarea pinului „T” la „RX” din modulul Bluetooth.



HC-06: Încărcați mai întâi schița numită „HC_06_Bluetooth” în Arduino UNO, apoi conectați modulul Bluetooth așa cum se arată în diagrama.
// HC-06-Bluetooth
void setup () {
// Porniți seria hardware.
Serial.begin (9600); // rata implicită a transferului HC-06
întârziere (1000);
Serial.print ("AT");
întârziere (1000);
Serial.print ("AT + VERSIE");
întârziere (1000);
Serial.print ("AT + PIN"); // pentru a elimina parola
întârziere (1000);
Serial.print ("AT + BAUD7"); // Setați baudrate la 576000 - de exemplu, Necomimi dafault
întârziere (1000);
Serial.begin (57600); //
întârziere (1000);
}
void loop () {
}Deschideți Serial Monitor în Arduino IDE și așteptați ca Arduino să configureze modulul BT. Modulul dvs. Bluetooth este acum setat la 57600 baud. Puteți încerca multe aplicații BCI (Brain Computer Interface), deoarece această jucărie Necomimi hacked va fi compatibilă cu orice aplicații Neurosky.
Puteți utiliza aceste aplicații pentru a afla cum să vă controlați undele creierului.
HC-05: Apoi folosiți „HC_05_Bluetooth” și încărcați-vă Arduino la fel ca înainte.
// HC-06-Bluetooth
void setup () {
// Porniți seria hardware.
Serial.begin (9600); // rata implicită a baudelor HC-05
întârziere (1000);
Serial.print ("AT");
întârziere (1000);
Serial.print ("AT + VERSIE");
întârziere (1000);
Serial.println ("AT + ROLE = 1"); // setați HC-05 la modul master
întârziere (1000);
Serial.println ("AT + LINK =" Introduceți adresa dvs. aici "); // acum modulul trebuie să se conecteze automat
întârziere (1000);
Serial.print ("AT + UART = 57600,1,0"); // Setați baudrate la 576000
Serial.begin (57600); //
întârziere (1000);
}
void loop () {}
Conectați pinul „EN” al HC-05 la Arduino 3v3. Trebuie să scrieți adresa modulului HC-06 în cod. Verificați adresa modulului BT de pe smartphone-ul dvs. Android. Înlocuiți „:„ (puncte duble) cu „,” virgule din cod.
Și trebuie să schimbați adresa în cod: 20: 15: 09: 15: 17: 82 = 2015.09.151782 Astfel, modulul HC-05 poate recunoaște adresa.
Telecomanda
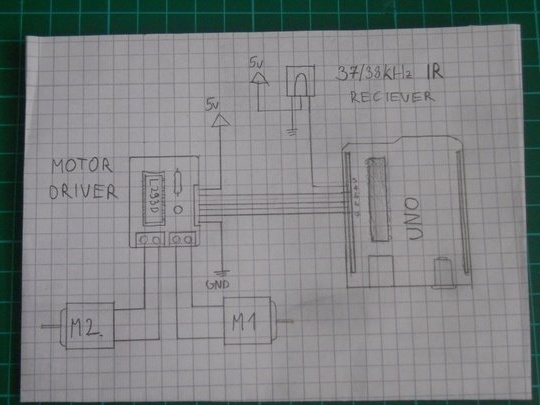
Pentru a crea acest robot ieftin, a fost utilizat un senzor cu infraroșu de 38 kHz, care este utilizat în telecomenzile televizate.
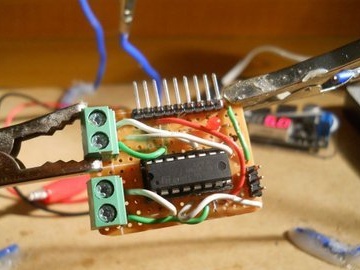
Sofer motor
Schema de acționare a motorului - Veți avea nevoie de următoarele detalii:
2 borne cu șurub
L293D IC3
Pinul antetului (90 de grade)
1k rezistor
LED roșu
sârmă
Placa de circuit
Folosind mai multe fire de cupru și, urmând diagrama, conectați pinii microcircuitului la pinii conectorului. Nu contează ce picior al microcircuitului la ce pin al conectorului, amintiți-vă doar unde le-ați conectat. LED-ul este conectat în serie cu rezistența și în paralel cu V VCC de 5 V.
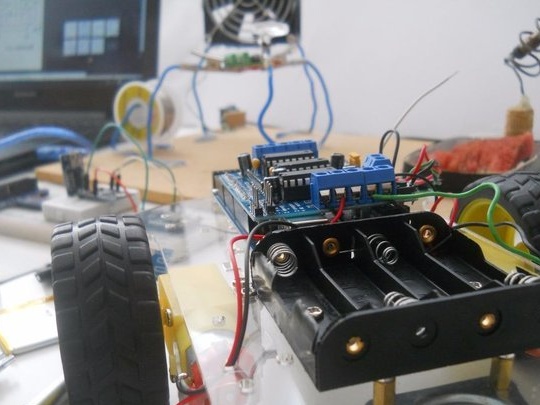
ansamblu șasiu
Ca șofer cu motor electric, este folosit cip L293D, care poate controla două motoare. Priviți diagrama pentru a construi diagrama.
Conectați piesele la Arduino
Pinul Arduino == & gt; sofer motor
4 == & gt; 15
5 == & gt; 10
6 == & gt; 7
7 == & gt; 2
VIN == & gt; 85v == & gt; 1, 9, 16
GND == & gt; 4, 5, 13, 12
Așadar, priviți diagrama circuitului modulului L293D, apoi conectați contactele sale la Arduino UNO, așa cum este descris mai sus. Pinul 5v Arduino trebuie conectat la pinii 1, 9, 16 pentru a activa funcția de control a motorului de cip. Apoi, în sfârșit, utilizați bornele șurubului pentru a porni motoarele.
Biblioteca folosește IRremote, un cod care citește semnale infraroșii de 38 kHz, le decodifică și apoi mută robotul. (Descărcați biblioteca în secțiunea „software”).
Există comentarii în cod, dar linia de jos este că decodează semnalele IR care provin de pe serverul principal, apoi, în funcție de ceea ce dorește utilizatorul, pornește motoarele, după care robotul înaintează sau face stânga. Descărcați codul: „Robot_Code”. Descărcați acest lucru pe Arduino și robotul dvs. va fi gata.
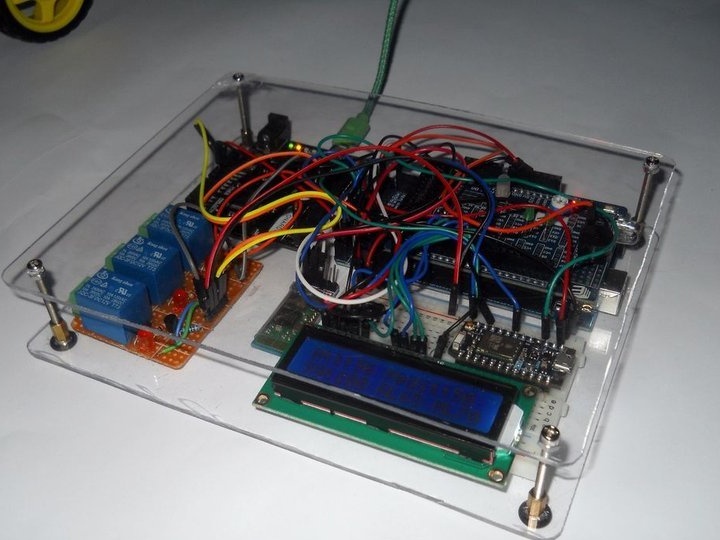
Serverul principal (Arduino Mega, Leonardo, Photon)




Serverul citește pachetele de date primite din setul cu cască wireless. Vom folosi modulul BT configurat pentru a asigura comunicarea între setul cu cască și server. Arduino Mega este creierul întregului circuit, totul este conectat la acest microcontroller: Bluetooth, LED-ul emițătorului infraroșu, server web și controler mouse. Codul este un pic complicat, dar, de regulă, are comentarii de înțeles.
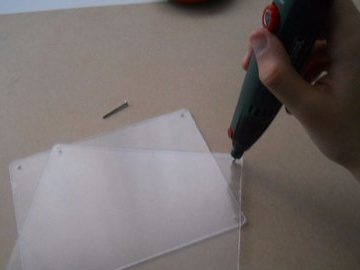
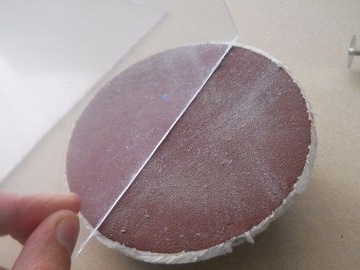
carcasă
Totul este simplu. Două plăci de 18x15 cm din plexiglas, netezesc marginile cu șmirghel. Câteva șuruburi pentru a le conecta între ele.
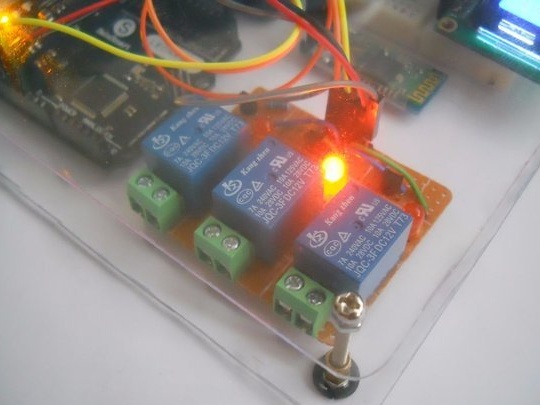
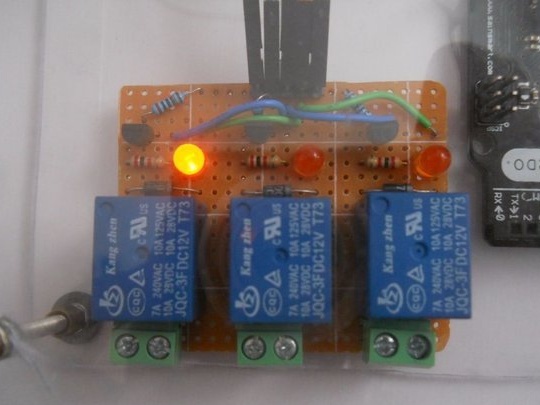
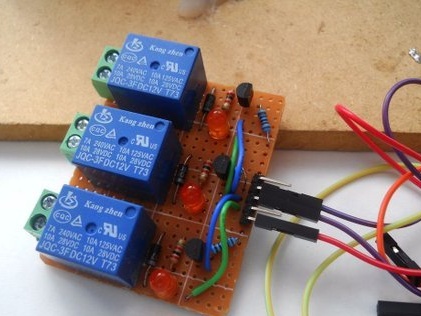
Placa releului
Veți avea nevoie de următoarele detalii:
Tranzistor 2n2222 (3 buc)
diode de germaniu (3 buc)
330 ohmi rezistențe (3 buc.)
1 kOhm rezistențe (3 buc.)
Releu 5 V (3 buc.)
conectori pin
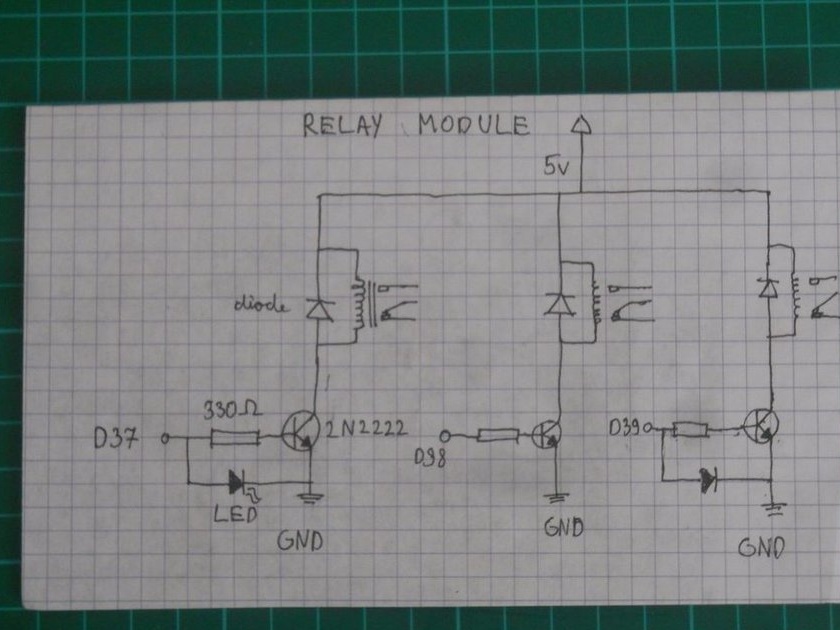
Placa de circuit
O imagine valorează mai mult de o mie de cuvinte, așa că uitați-vă la diagrama modului de conectare a pieselor pe o placă de circuit imprimat.
Dacă ieșirea „Semnal” este de la un Arduino, releul se va porni. Tranzistorul amplifică semnalul pentru a oferi o putere suficientă pentru releu. Vom folosi 37-38-39 contacte pentru a controla nivelurile HIGH LOW ale fiecărui releu.
Pentru a instala piese pe o cutie din plexiglas, autorul a folosit bandă dublă. El ține cam detaliile.
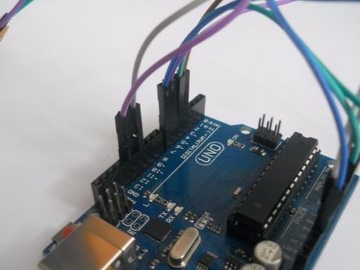
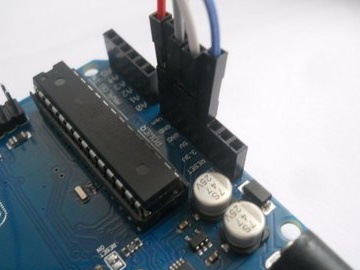
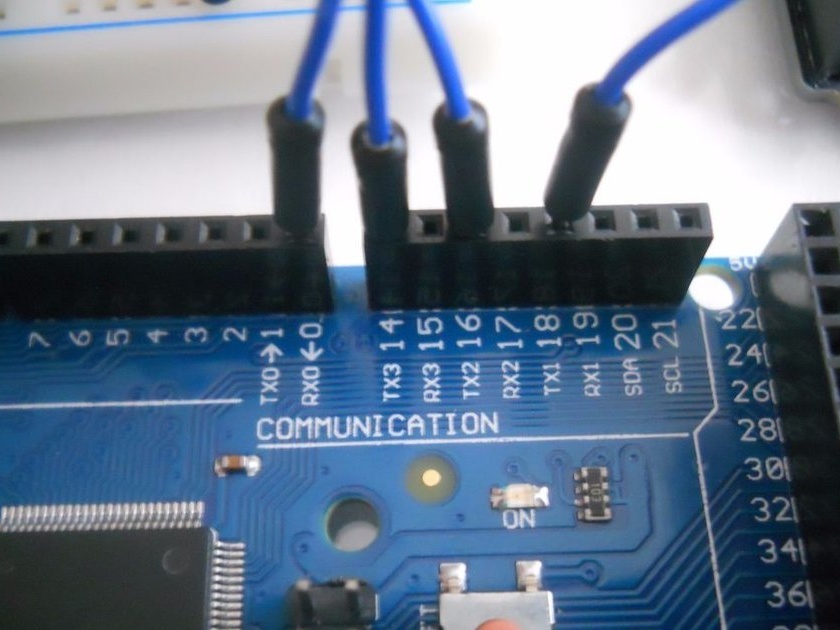
Acesta este un server software, deci crearea unui circuit nu este atât de dificilă. Trebuie doar să porniți microcontrolerele și să stabiliți o conexiune între ele. LED-ul IR este conectat la pinul D3, iar releul este conectat la 37-38-39. D16 Arduino Mega merge la RX Photon și D18 la RX Leonardo.
Conexiune robot
[2.02 Kb] (descărcări: 14)
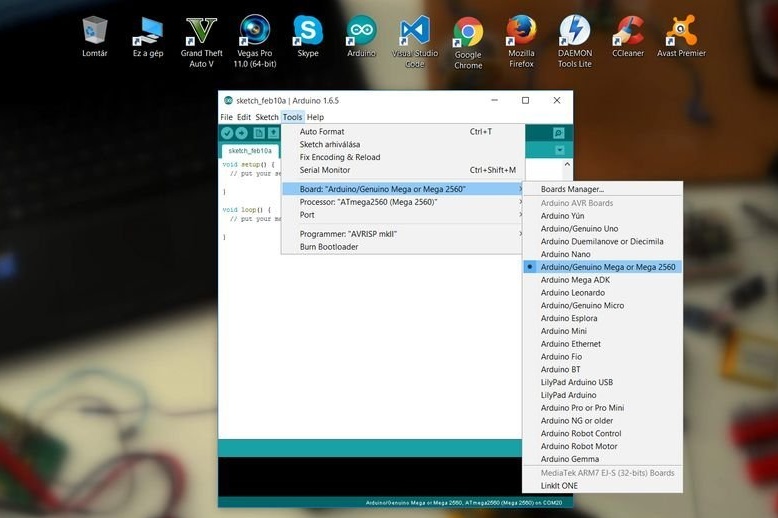
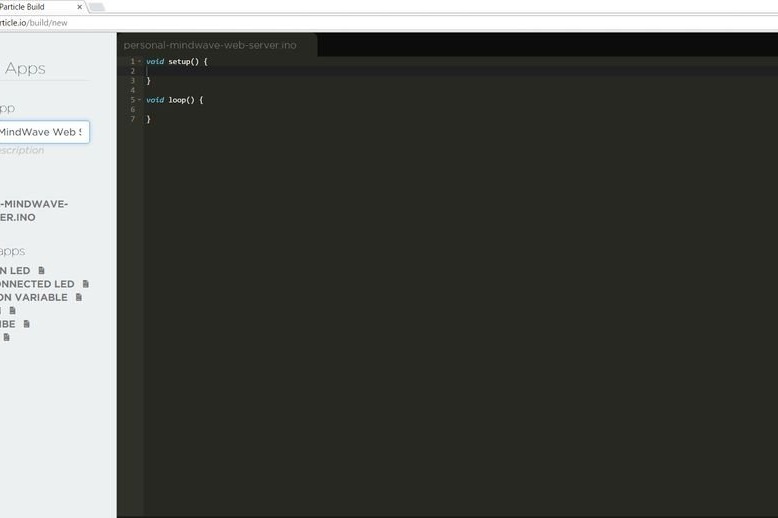
Însă acum codul este gata și funcționează, așa că trebuie doar să descarci microcontrolerele. Descărcați fișierul .ino sau copiați / inserați codul în IDE și folosiți-l. Codul pentru Particul Photon trebuie descărcat prin IDE-ul browserului. Pentru a face acest lucru, înregistrați-vă la. Și conectați laptopul la microcontrolerul dvs. Totul se întâmplă aproape automat, adăugați doar ID-ul dispozitivului.
Înainte de a descărca codurile, asigurați-vă că nu este conectat nimic la pinii RX / TX. Așadar, deconectați modulul Bluetooth de la Mega și deconectați Mega de la Leonardo și Photon.
[489 b] (descărcări: 15)

Server webPentru a adăuga funcția IoT (Internet of Things) la proiectul său, autorul a realizat un înregistrator online de date utilizând Particle Photon. În funcție de ceea ce faci cu dispozitivul, Photon creează un server personal și scrie date în cloud.Acest lucru poate părea intimidant la început, dar imaginați-vă că puteți determina dacă sunteți stresat (nivelul de atenție crește și scade rapid) sau merită să dormi
(meditația este întotdeauna peste 80)
. Acest server web vă poate ajuta să trăiți mai sănătos.
Codificarea browserului
Particle are, de asemenea, un panou online unde puteți publica orice date folosind „Particle.publish ();” sintaxa. Dezvoltatorii de bare de instrumente au economisit mult timp pentru utilizatori.
