

Vrei să ai o luptă între roboți păianjen? Apoi studiați cu atenție acest articol, în el Maestrul vă va spune cum să faceți un astfel de păianjen. Și pentru claritatea activității sale, să vedem videoclipul.
Instrumente și materiale:
Pentru păianjen
Servo-controler cu 32 de canale;
-Wemos D1 Mini controller;
- Unități servo MG90S - 18 buc;
-Controller 6A 5V Ubec;
- convertor DC-DC buck;
- Jumpers;
-Akkumulyator;
Pentru turn
-Doua motoare;
-Podul de alimentare;
- Convertor de coborâre;
-Servoprivod;
-Imprimant 3D;
-Pistol de luciu;
-Kley;
- surubelnita;
-Krepezh;
- bandă cu două fețe;
-Kusachki;
-Nozh;
-Nadfili;
-Bile plastice;
-Accesorii de vânzare;






Pasul 1: Imprimarea pieselor
Mai întâi trebuie să imprimați detaliile corpului și picioarelor pe o imprimantă 3D. Puteți descărca fișiere pentru imprimare în acest sens legătura.


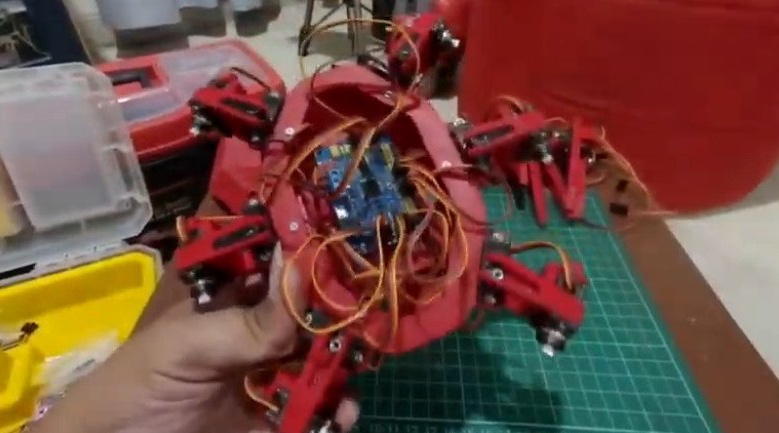
Pasul doi: Construiți
Acum trebuie să colectați robopauk.
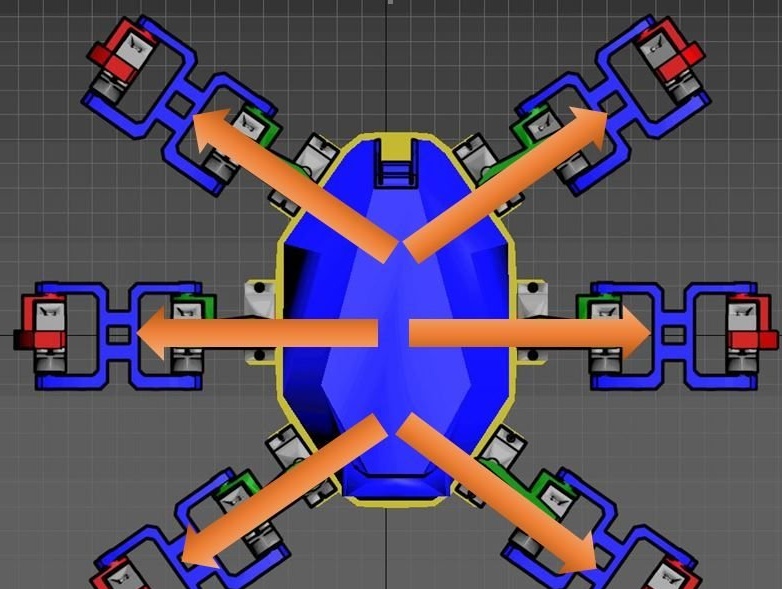
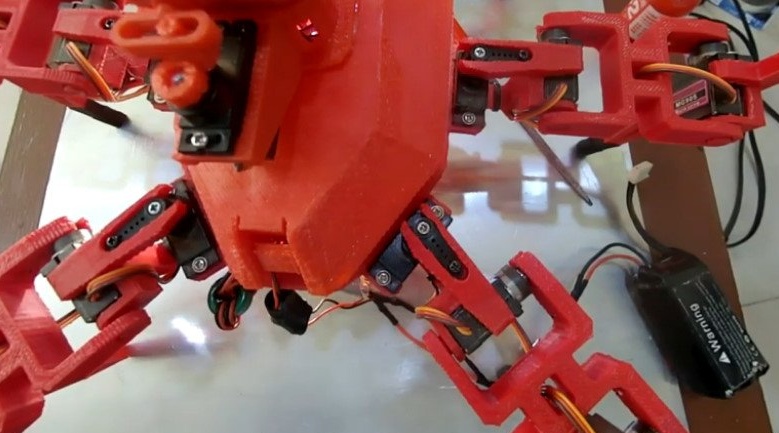
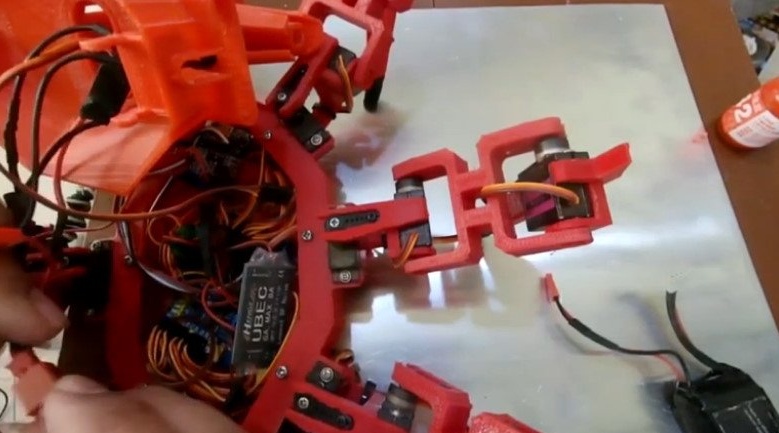
Stăpânul instalează servos pe articulațiile picioarelor păianjenului. În total, robotul are șase picioare și trei servos pe fiecare picior.








Instalează servos pe platforma șasiului.




Fixează primele articulații ale picioarelor la servosurile platformei.




Firurile sunt trase în orificiile tehnologice și conectate la regulator.





Instalează cioturi.


Stabilește a doua articulații a picioarelor. Conectează firele de la servos la regulator.






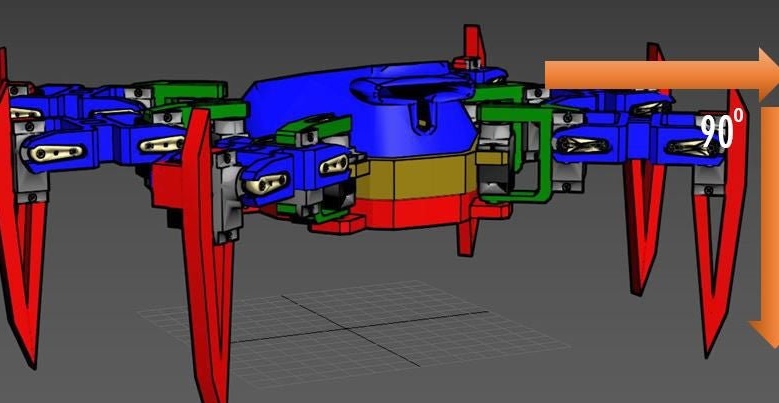
Instalează a treia articulație. Cu această articulație, păianjenul va opri suprafața la mișcare.


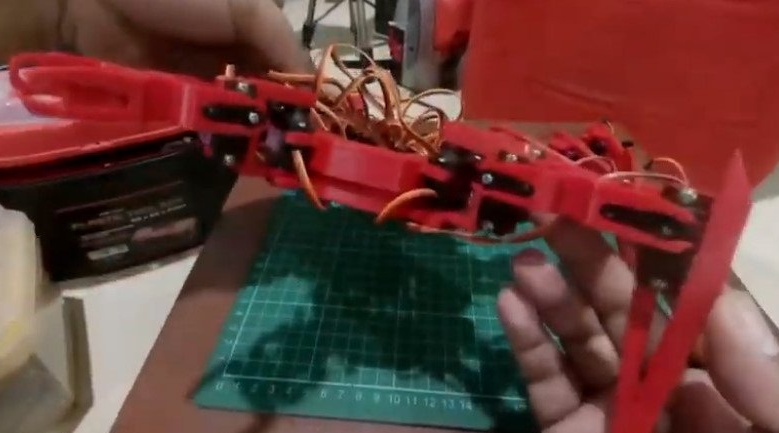

Conectează și verifică funcționarea fiecărui servomotor.



Dacă totul fixează în mod normal firele cu legături, instalează bateria și închide capacul.



Procesul de compilare poate fi văzut în videoclip.
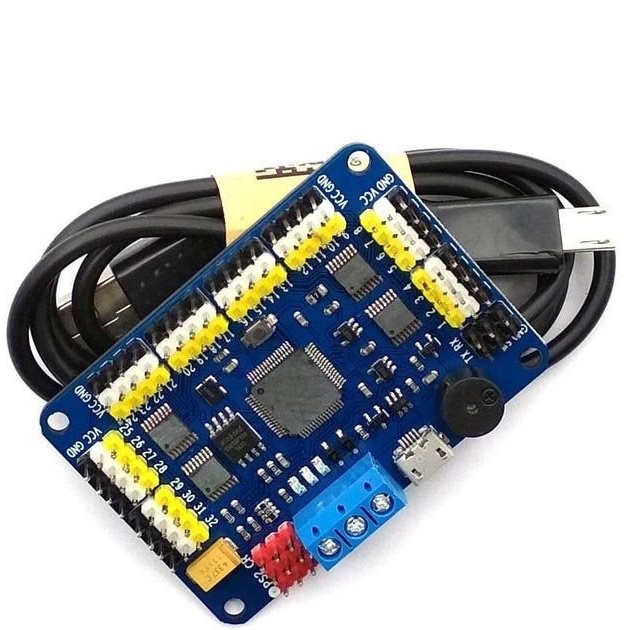
Pasul trei: Despre electronică
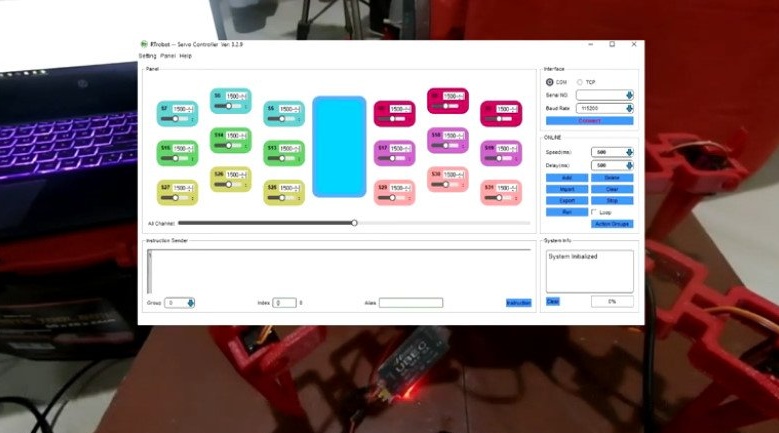
Expertul a folosit servo-controlerul RTrobot pentru a controla mișcările. Programul de management poate fi descărcat aici sau aici.
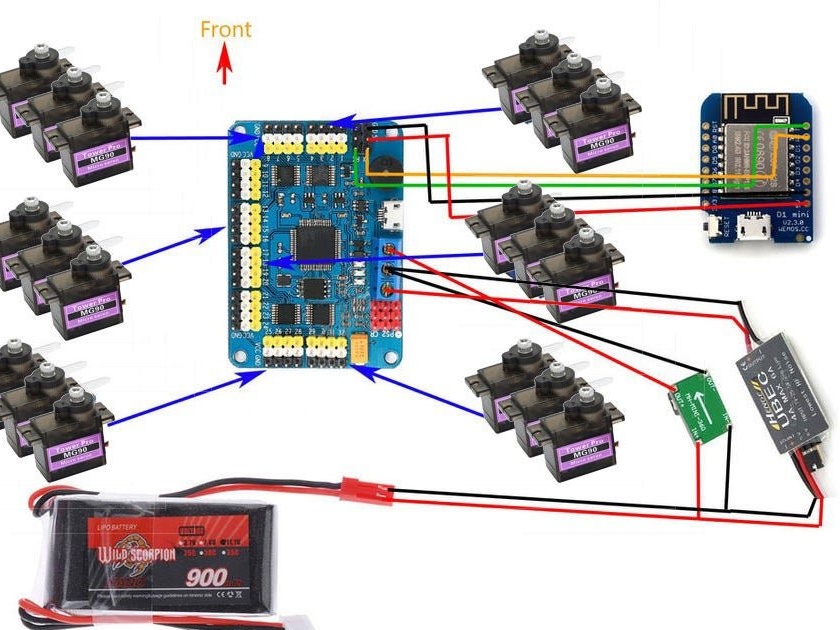
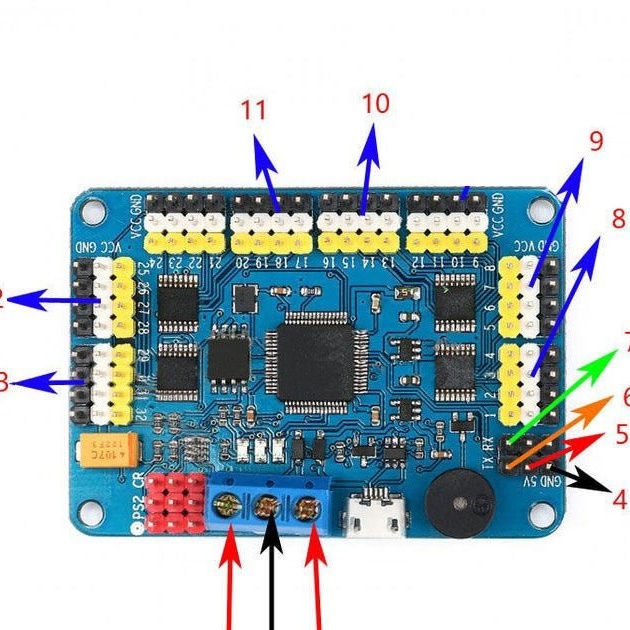
Totul este conectat după cum urmează:
1. 5V (+) ieșire UBEC
2. Pământ de la UBEC și convertor buck
3. Alimentare de 5 V (+) de la convertor
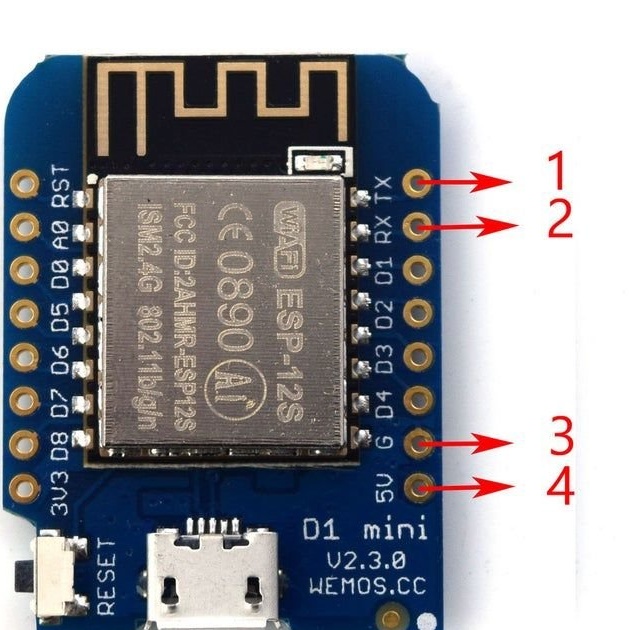
4.de pinul Wemos D1 mini G
5. la Wemos 5v
6. la Wemos D1 RX
7. Wemos TX
Servomotoarele sunt conectate la pinii 8 până la 13.
Instalați codul pe NodeMCU. Îl poți descărca aici.
WeMos D1 mini este cardul Wi-Fi ESP8266 minim.
Folosind wemos D1 mini ca punct de acces WIFI, puteți trimite o comandă serială servo-controlerului. Tot ce este necesar este doar să clipești placa nodeMCU cu cod și poți conecta smartphone-ul la AP-ul nodeMCU. Apoi, folosind un browser web, accesați http://192.168.4.1.
Este important.
când porniți servo, toate servosurile se vor muta în poziția inițială / standard
instalați serverele cât mai exact posibil, așa cum se arată în figura de mai sus sau în videoclip
reglați poziția îmbinărilor, opriți dispozitivul și porniți din nou pentru a vă asigura că toate picioarele sunt în poziția corectă
dacă articulațiile se agață, freacă, reglați poziția.
Pasul patru: Turnul
Acum apelăm la ansamblul turnului.
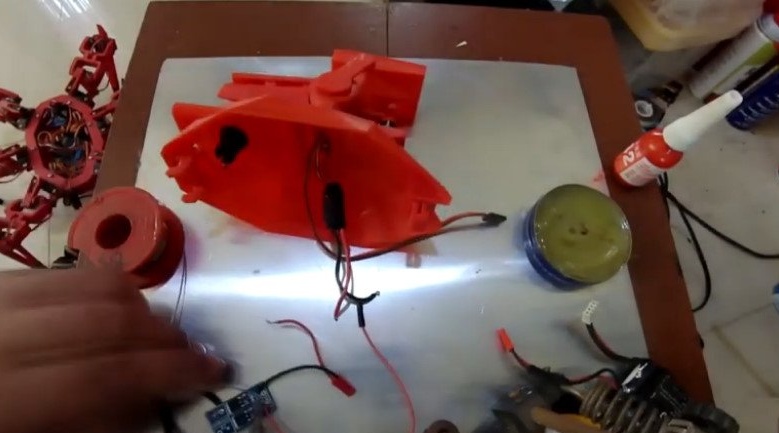
În primul rând, detaliile turnului trebuie tipărite. Puteți descărca fișiere în acest sens legătura.
Apoi stăpânul continuă să asambleze turnul. Circuitul pentru rotirea turnului și conectarea pieselor electrice este mai jos.
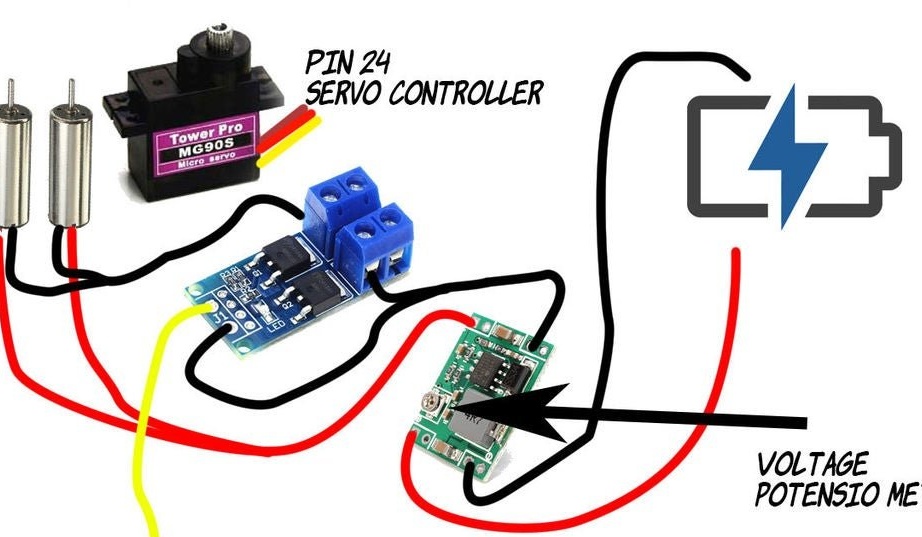
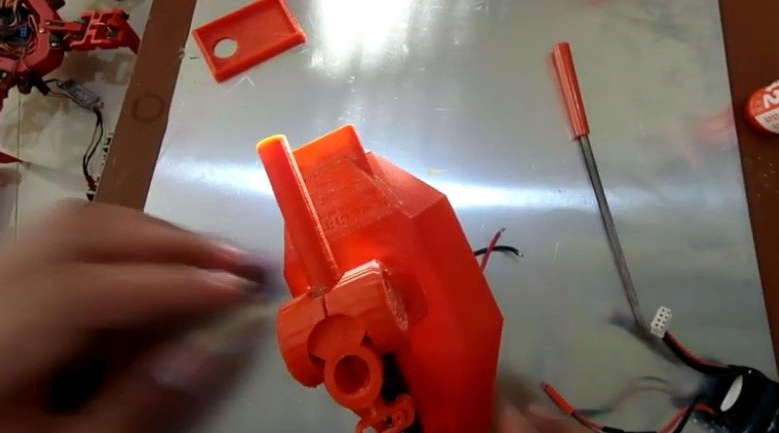
Instalează un servo pe turn.







Banda dublu față se lipește de role.


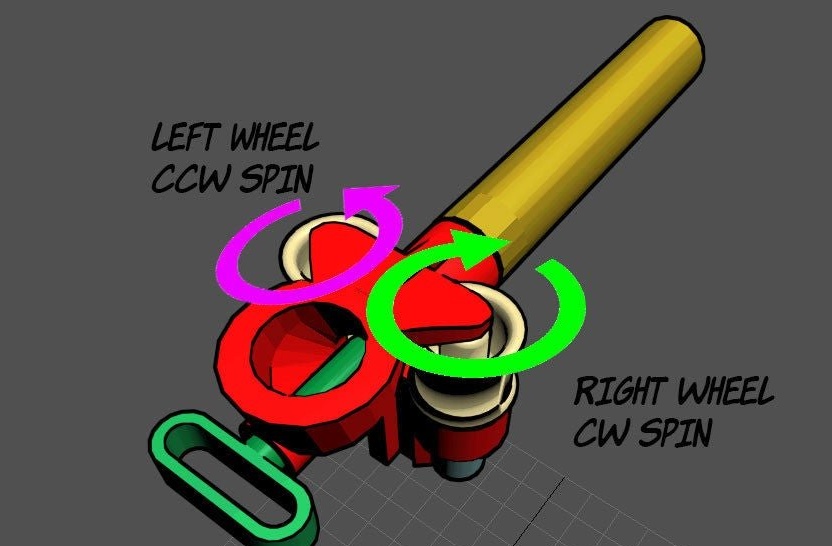
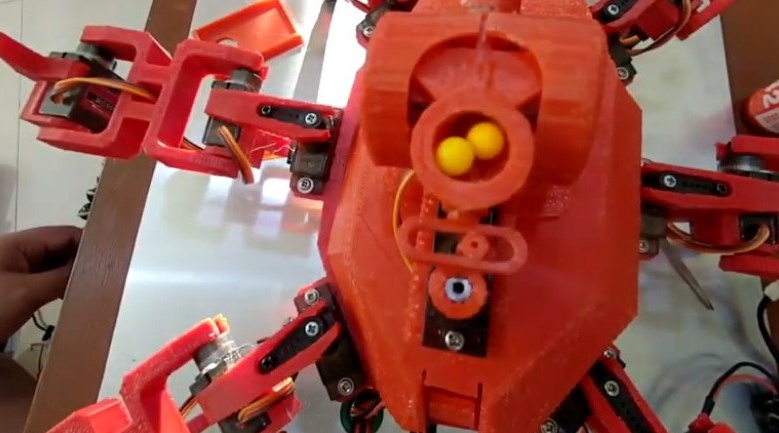
Colectează o armă. Instala motoarele într-un suport. Instala rolele pe arborele motorului.







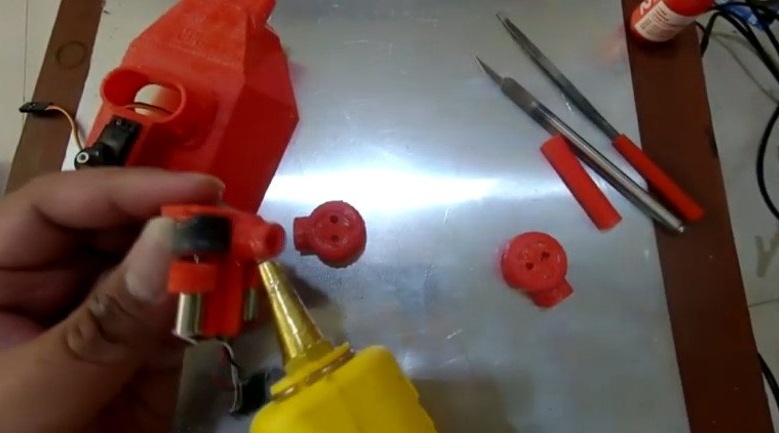
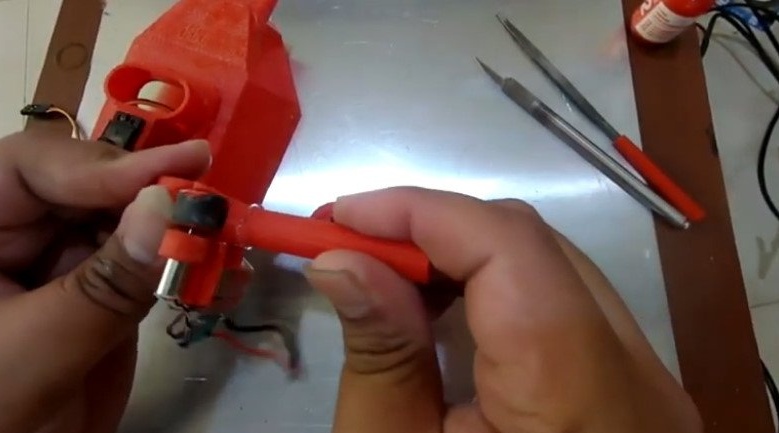

Conectează firele și colectează turnul.




Încarcă cochilii și verifică funcționarea armei. Mecanismul poate fi reglat prin mutarea suportului pe arborele servo.


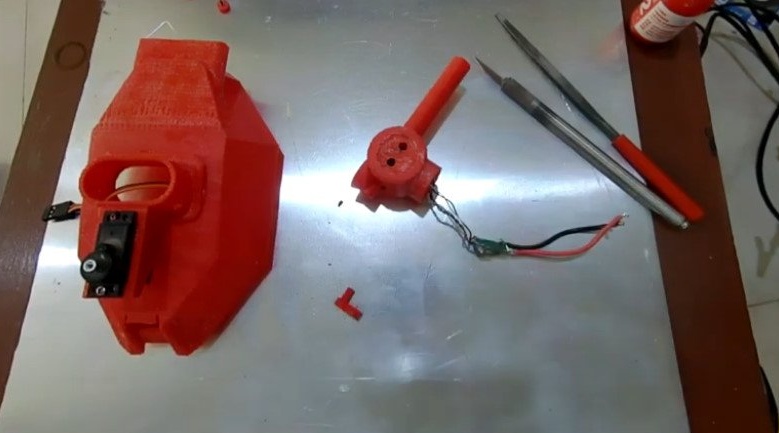
Face conexiunea, asamblarea și inspecția finală.




Videoclipul cu ansamblul turnului poate fi văzut mai jos.
Totul este gata. Adună încă un astfel de robopauk și poți aranja lupte.
