

Autorul a bazat acest proiect pe o versiune mai simplă. de casă bărcile și l-au perfecționat. Senzorii sunt amplasați în barcă pentru a evita obstacolele și pentru a se deplasa în lumină. Modul de utilizare a regulatorului din barcă Arduino, un senzor cu ultrasunete este instalat în față, iar senzorii de lumină sunt amplasați pe laterale. Această barcă simplă nu se prăbușește în pereți și este controlată de o lanternă.
Materiale și instrumente:
- Banda izolatoare / bandă adezivă
- Termogliu cu lipici fierbinte
- Motoare cu curent continuu 2 buc
- Sticle de plastic 2 buc
- fire
- Elice mici 2 buc
- Arduino, computer și cablu USB
- Cutie de plastic
- Baterie și conector 9V
- Diode de putere (tip 1N4004)
- Rezistoare
- MOSFET tranzistor sau TIP 120
- Două fotocelule și două butoane
- foarfece
- Lustruire cu fier de lipit

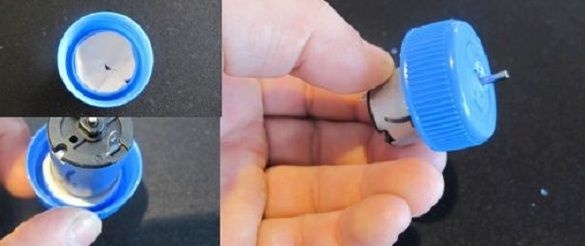
Pasul 1. Instalarea motoarelor.
Capacele sunt scoase din sticle și se face o gaură în fiecare dintre ele. În interiorul capacului, autorul stoarce lipici fierbinte, fără a închide găurile. A așezat arborele motorului în gaură și l-a așezat pe lipici. După ce lipiciul se usucă, axul se rotește liber. Aceeași procedură are loc și cu cel de-al doilea capac.
Pasul 2. Atașarea sticlelor.
Sticlele au fost fixate împreună prin principiul unei plute cu ajutorul a trei benzi de bandă adezivă.

Pasul 3. Lipirea la motoare.
Deoarece motoarele montate în mufe nu aveau fire, era necesar să le lipim, lungimea firelor era de aproximativ 25-30 cm.

Pasul 4. Tăierea în sticle.
Pentru ca firele să cadă în coca bărcii, din partea superioară a acestora se face un mic slot.

Pasul 5. Asigurarea motoarelor.
Mai departe, autorul răsucește capacele pe sticle, deoarece acestea nu s-au răsucit bine, a trebuit să folosesc lipici fierbinte. Firele sunt împinse prin găurile pregătite de pe sticle.

Etapa 6. Caz.
O cutie de plastic se lipește de două sticle. În această capacitate pentru electronică, puteți face găuri pentru fire sau puteți ține firele prin partea din spate a cutiei. Găurile pentru firele din sticle sunt izolate cu adeziv topit la cald.

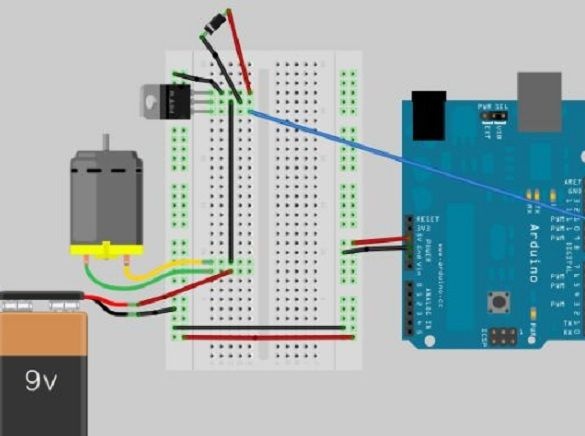
Pasul 7. Schema de cablare.
Circuitul folosește un tranzistor TIP 120 ca un comutator (puteți utiliza tranzistoare similare MOSFET sau Darlington). Este folosit pentru a comuta sarcina atunci când consumi o cantitate mare de curent, deoarece Arduino nu are suficientă putere pentru motoare. Acest circuit este asamblat pentru primul și apoi pentru al doilea motor (nu este necesară o altă baterie pentru al doilea motor).
Pasul 8. Senzori.
Senzorul cu ultrasunete este excelent pentru partea din față a bărcii, avertizează asupra obstacolelor din drum. Fotocelule acționează ca antene și sunt folosite pentru a face barca să plutească în lumină.Butoanele din laterale sunt utilizate ca senzori de obstacole. Puteți modifica codul și puteți utiliza alți senzori, precum infraroșu.

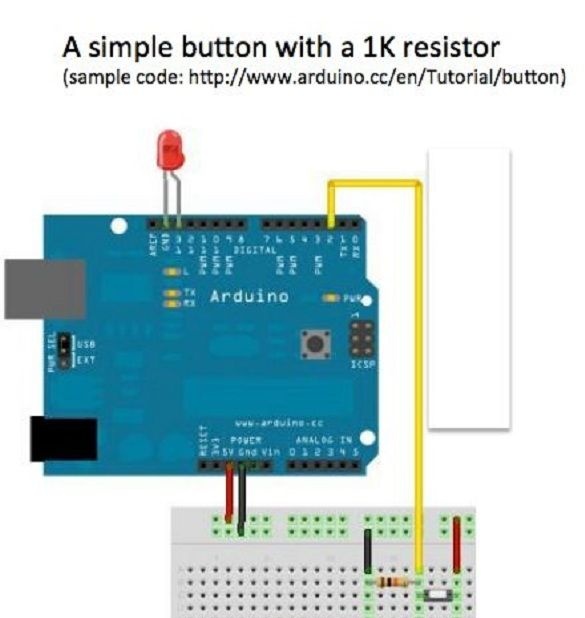
Pasul 9. Scheme pentru senzori.
Diagrama prezintă conexiunea unui buton simplu și a unui rezistor de 1K. Schema pentru ambele butoane este repetată, butoanele sunt așezate pe ambele părți ale bărcii. Aceștia vor fi responsabili de schimbarea mișcării bărcii în coliziune.
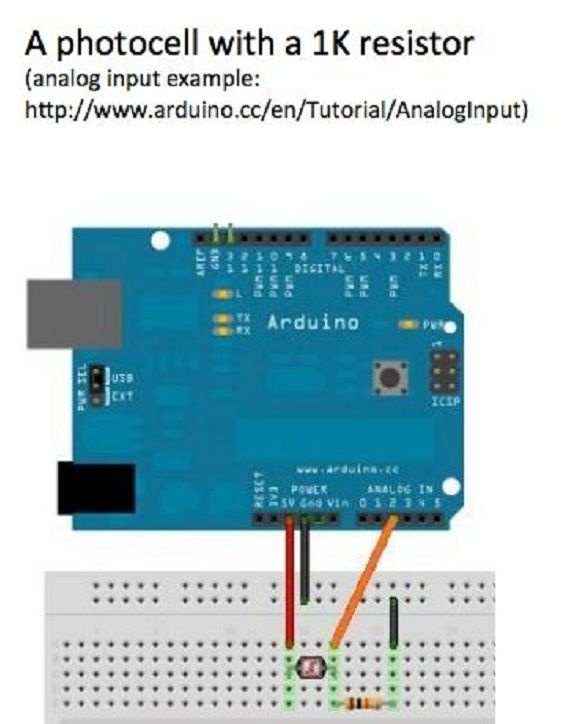
Următoarea figură arată un circuit cu un rezistor și o fotocelă de 1K. Autorul a executat-o de 2 ori și a așezat fotocelele pe părțile opuse ale bărcii.
Pasul 10. Codul programului.
Autorul a oferit posibilitatea de a descărca codul său pentru utilizare, oferind astfel funcționalități de bază pentru cei care vor monta o astfel de barcă. Codul include suport pentru fotocelule, telemetru și butoane. Barca va încerca să evite obstacolele din fața ei și se va întoarce în direcția opusă atunci când întâlnește obstacole din lateral. Dacă nu există dorința de a utiliza întregul set de senzori, dar doar unii dintre ei au un cod pentru fiecare separat. Puteți descărca toate codurile din articol.
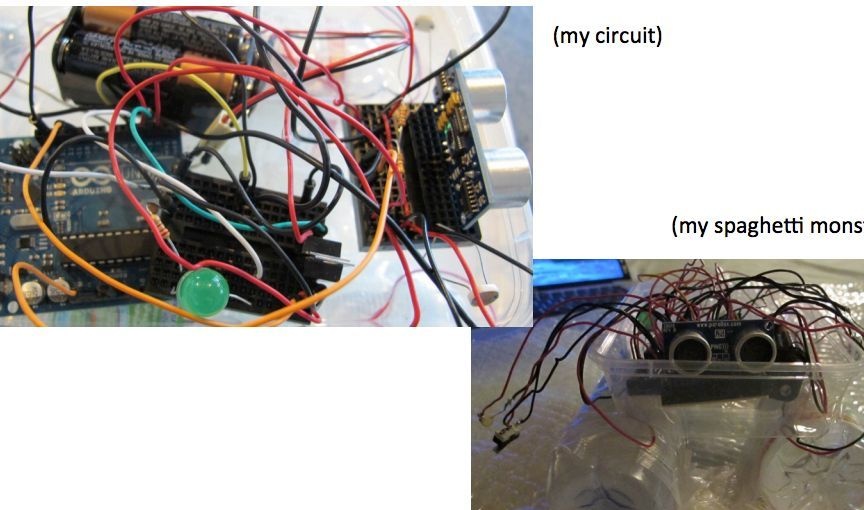
Pasul 11. Asamblarea barcii.
Circuitul asamblat, Arduino și bateriile sunt box.
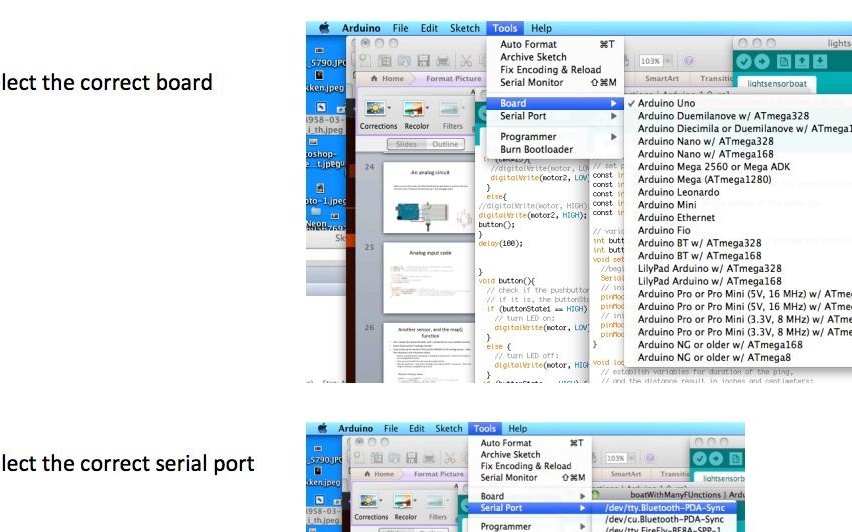
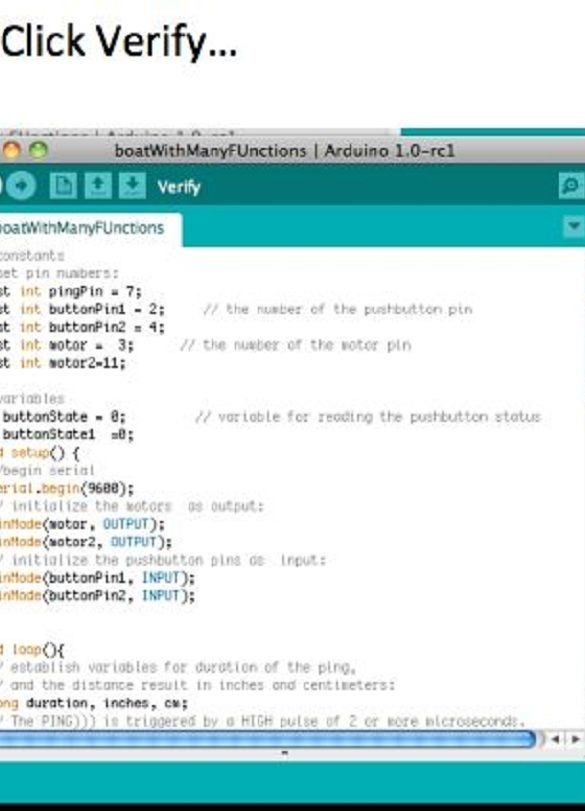
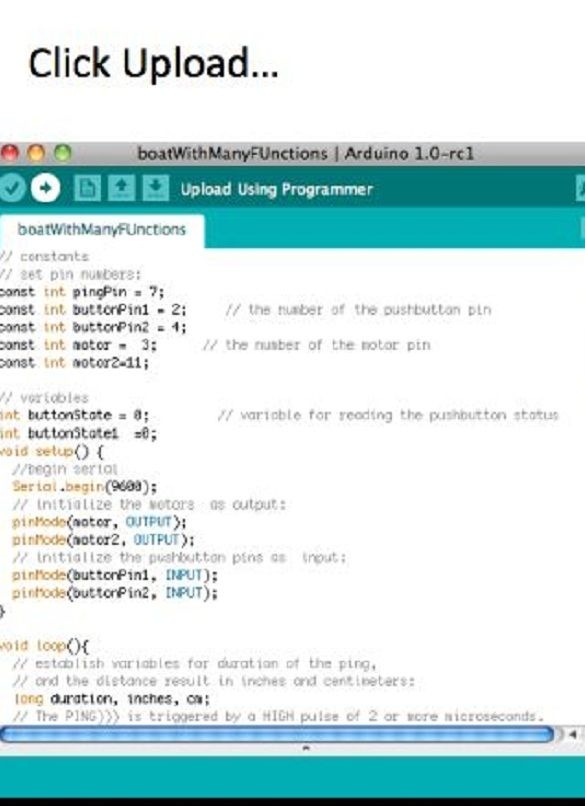
Pasul 12. Descarcă schița.
Apoi, se deschide Arduino IDE, alegând fișierul și portul potrivit, după care autorul a compilat și încărcat codul către controler.
Etapa 13. Rezistență la apă și testare.
În plus, autorul a izolat toate locurile potențiale de intrare a apei cu lipici fierbinte. De asemenea, izolați toate firele de scurtcircuit. Recipientul cu Arduino este acoperit cu aceeași cutie și sigilat cu bandă electrică. Elice sunt atașate la motoare. Aici barca este gata, acum puteți începe testarea pe apă.



Videoclip cu un test preliminar al navei: