

Crearea proiectului a început în februarie 2015. în primul rând robotul linia „Antei” era „Domovenok” - o perie de robot. Mai târziu a apărut „Antei 1”.
Platforma Anteya este o carcasă echipată cu un controler Arduino Uno, senzori și instrumente pentru diverse funcții. Antei poate deveni, de asemenea, aspirator, combinat gospodăresc, robot de pază etc.
Dar caracteristica principală a lui Antey este detașarea „furnicilor” care îl mișcă pe Antey.
Principiul de funcționare al complexului nostru a fost luat din natura însăși. Fiecare așa-numită furnică se poate mișca independent, dar este, de asemenea, capabilă să efectueze o muncă colectivă. În același timp, ei sunt capabili nu numai să ridice o încărcătură mult mai grea decât greutatea lor, dar știu să se deplaseze împreună pentru sarcini incredibil de mari pentru ei.
Fiecare dintre furnica noastră este echipată cu un motor cu vibrații. Aceasta este o formă de propulsie destul de neexplorată. Avantajele sale sunt evidente. În primul rând, acest tip de propulsie este mai economic în consumul de energie. În al doilea rând, este compact spre deosebire de alte tipuri de motoare, dar oferă performanțe decente.
Am aflat că fiecare „furnică” cu o greutate de 8 grame. poate trage 89g., ceea ce indică faptul că este capabil să poarte greutate de 11 ori.
De la crearea Antei, a existat o întrebare cu privire la numărul de motoare cu vibrații, cum sunt amplasate acestea pe platforma robotului și din ce ar trebui făcute picioarele furnicilor (o periuță de dinți sau picioarele de cauciuc). Au fost încercate multe opțiuni.
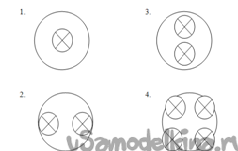
Dar s-a decis stabilirea 2 rânduri de 3-4 furnici pe picioarele de cauciuc pe fiecare parte a platformei, în timp ce acestea trebuie să fie într-un cuplaj rigid între ele.
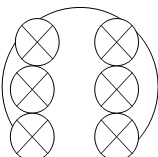
În acest exemplu de realizare, se realizează o mișcare încrezătoare în față și, atunci când anumite motoare sunt oprite, se efectuează o rotire în lateral.


Anteul nostru
