
Materiale și instrumente:
- microcontroler Arduino (în acest sens produs home-made aplică Arduino Uno Rev 3);
- Două servos de la Parallax;
- joystick (tot din Parallax);
- placa de circuit) mic);
- conectori pentru conectare;
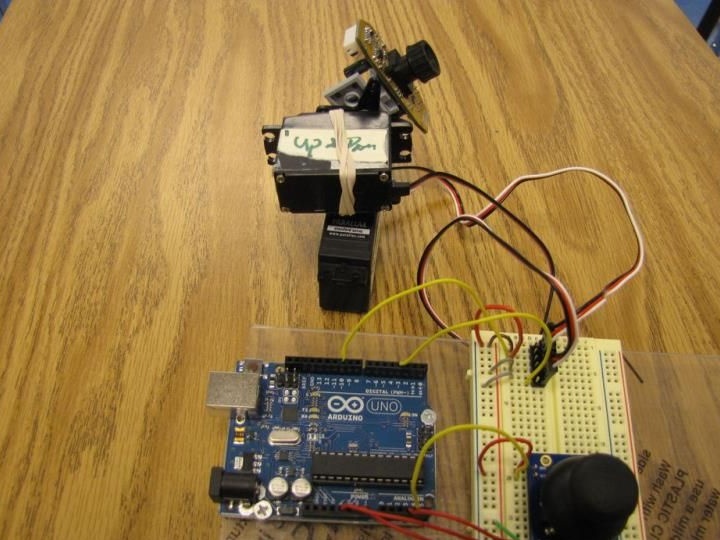
- Un dispozitiv pentru urmărirea mișcării servomotorilor (se utilizează o cameră web spartă și cuburi lego).
Proces de asamblare de casă:
Primul pas. Conectăm servomotorii
Procesul de asamblare de casă începe prin conectarea servomotorilor. Pentru a asambla un aspect preliminar, se folosește o placă de circuit. Atunci va fi posibil să se facă un scut separat. În figură puteți vedea cum este conectat exact totul.
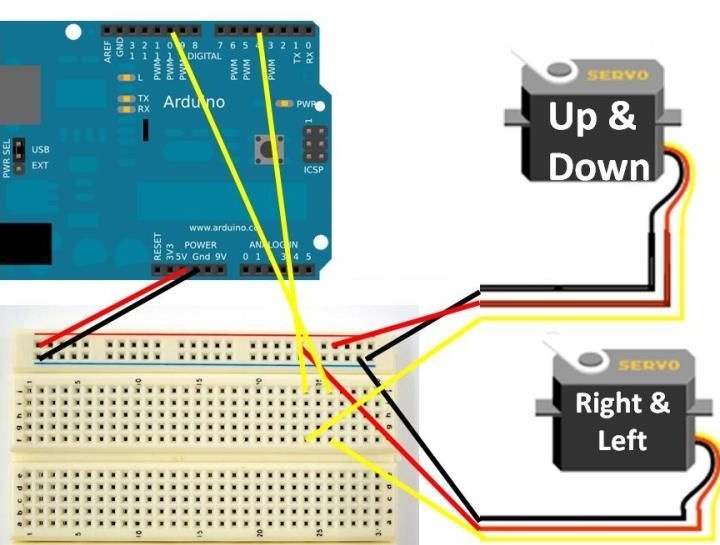
Cablul roșu este puterea, se conectează la pinul 5V de pe controlerul Arduino.
Firul negru este un minus (masă), se conectează la ieșirea Arduino numită GND.
Cablul galben de la servomotorul dreapta și stânga trebuie conectat la pinul 11. La unele modele, acesta poate fi alb.
Un pin similar galben sus și jos trebuie să fie conectat la pinul 4. Poate fi de asemenea alb pe unele modele de motor.
Este important să ne amintim că conectorii de semnal folosiți pentru controlul motorului provin de la ieșirile PWM.
Pasul doi Conectați joystick-ul
Modul de conectare al joystick-ului poate fi văzut în imagine. La început, schema poate părea destul de complicată, dar de fapt nu există nimic complicat aici. Ca și în cazul motoarelor, aici se folosește o placă de cabluri.
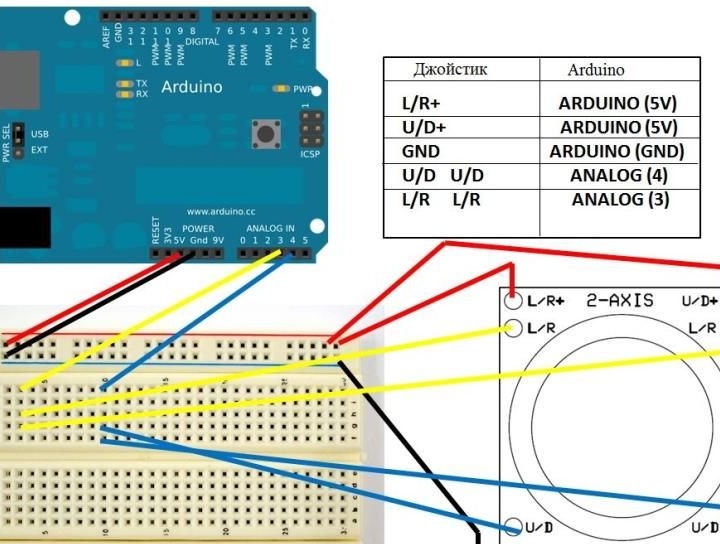
1. Pe modulul joystick, puteți găsi ieșirile U / R + și L / R +. Prin aceste ieșiri, este conectată puterea. În consecință, trebuie să aplicați + 5V tensiune de la pinul corespunzător Arduino.
2. Există, de asemenea, doi conectori sub joystick numiți L / R și doi conectori U / D. Trebuie conectate la ieșirile analogice A3 și A4.
3. În concluzie, pământul de pe joystick trebuie să fie conectat la pământul de pe Arduino.
După asamblare, conexiunea trebuie verificată de două ori. Datorită erorilor de conexiune, în majoritatea cazurilor apar probleme. Acest lucru este valabil mai ales atunci când este utilizată o placă de circuit și există multe conexiuni pe ea.
Pasul treiSchiță pentru Arduino
Codul este foarte simplu și conține comentarii detaliate. Codul de mai sus trebuie doar să fie copiat în IDE Arduino. Odată încărcat codul, motoarele nu trebuie să se miște. Acestea ar trebui să înceapă să se miște numai atunci când este apăsat butonul de pe joystick.
Probleme care pot apărea și cum să le rezolve
1. Dacă motoarele nu se aprind, verificați de două ori conexiunea. Ieșirile PWM sunt utilizate pentru conectarea motoarelor, iar ieșirile analogice sunt utilizate pentru conectarea joystick-urilor.
2. Se întâmplă ca imediat după încărcarea codului, motoarele să înceapă să vibreze. Acest lucru se întâmplă dacă conectați incorect pinii U / D + L / R +. Conexiunea trebuie verificată cu atenție. Pentru a nu arde placa în timpul testului, aceasta trebuie deconectată de la computer.
3. Dacă totul este verificat, dar motoarele încă nu vor să funcționeze, puteți încerca să reconectați joystick-ul. Trebuie scoasă de pe placa de circuit, apoi instalată din nou cu ceva efort. Conectorii joystick ar trebui să intre bine în aspect.
Dacă totul s-a dovedit, acum puteți începe să creați orice obiecte de casă cu control prin intermediul joystick-ului. De exemplu, puteți face un robot care poate fi controlat cu un joystick și multe altele.