


Am luat parte din proiectarea mea din instrucțiunile de montaj pentru Lego Technic 42029. Restul este improvizația mea. Deci avem nevoie de:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (mai bun decât Populus, dar puteți avea și o omologă chineză)
- 2 servomotoare SG-90
- Receptor IR
- Cutie de viteze motor 200 rpm
- 2 LED-uri
- 2 rezistențe de 150 ohmi
- condensator 10v 1000uF
- 2 pieptene cu un singur rând PLS-40
- 2 conectori PBS-20
- Inductor 68mkGn
- 6 baterii NI-Mn 1.2v 1000mA
- Conector tată-mamă cu doi pini la cablu
- Homutik
- Firuri de diferite culori
- lipire
- Rosin
- cuțit de papetărie
- fier de lipit
- Șuruburi 3x40 și piulițe și șaiburi pentru ele
- Bolțuri 3x60
- Baterii Ni-Mn 1.2v 1000mA 6buc.
Pasul 1 colectăm spatele suspensiei.
În primul rând, trebuie să asamblați partea din spate a suspensiei conform instrucțiunilor Lego 42029 partea 1, începând de la 3 pagini și 8 inclusiv. În continuare, adăugați câteva detalii, astfel încât să puteți instala motorul și cutia de viteze.

Etapa 2 suspensie frontală.
Asamblăm partea din față a suspensiei conform instrucțiunilor de la Lego 42029 partea 1, de la pagina 21 la 23. Luăm trapezul din partea a doua a instrucțiunilor Lego de la pagina 6 la 11. Asamblăm troliu din partea a doua a paginii 14 - 22. Iar partea de protecție a celei de-a doua este de 34-36 de pagini.
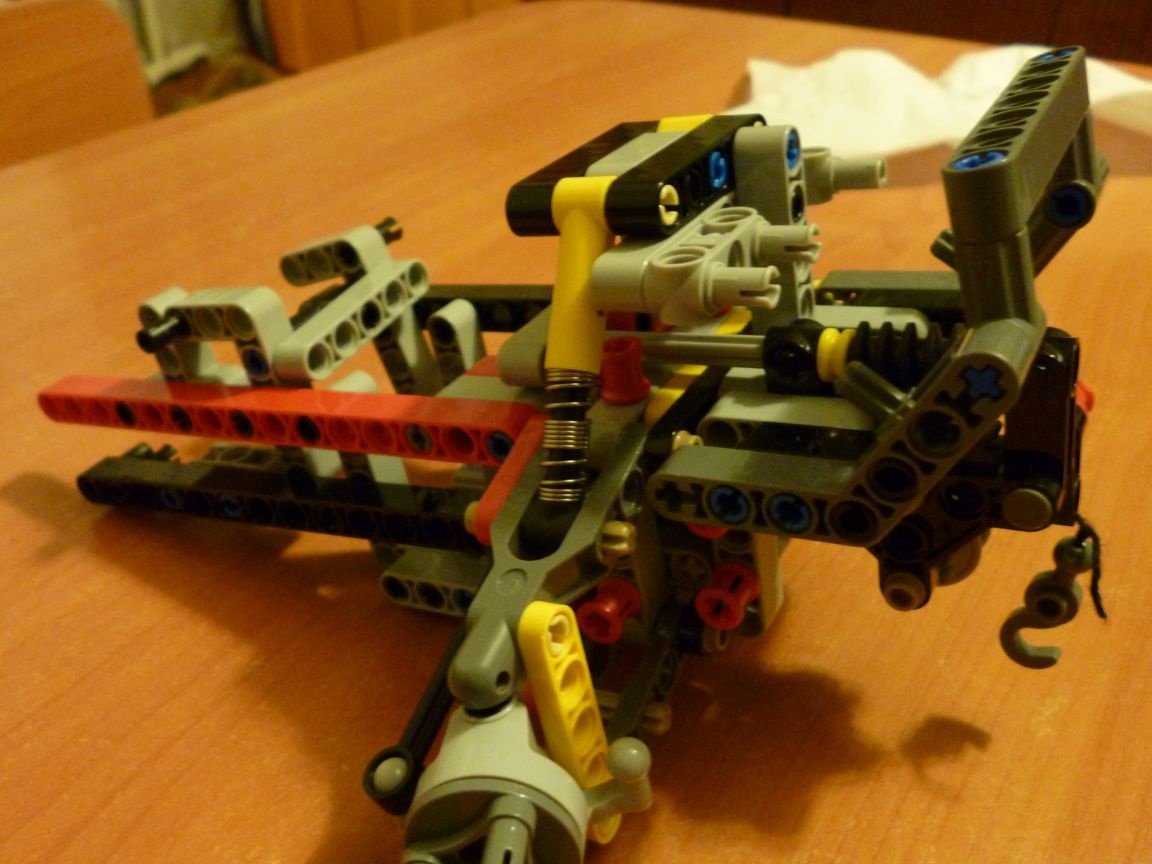

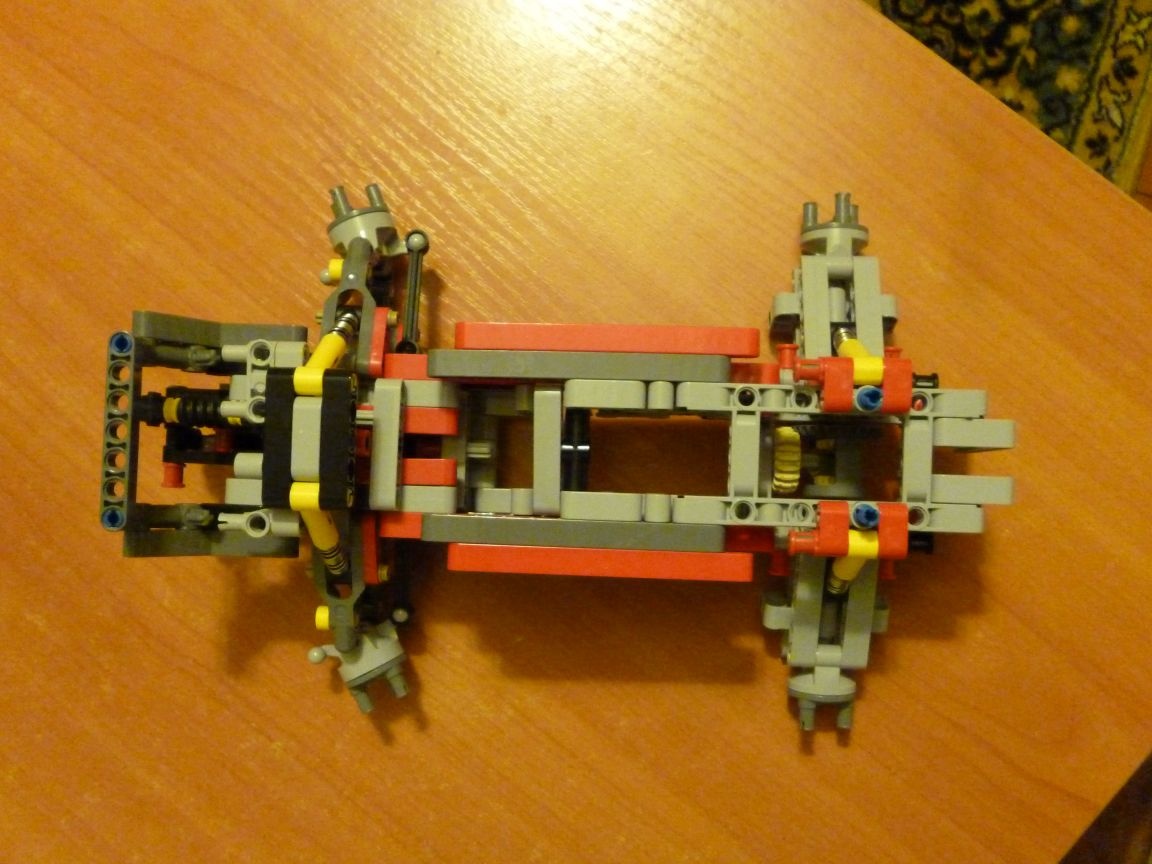
Pasul 3 asamblați șasiul.
Conectăm ambele părți, așa cum se arată în fotografie:

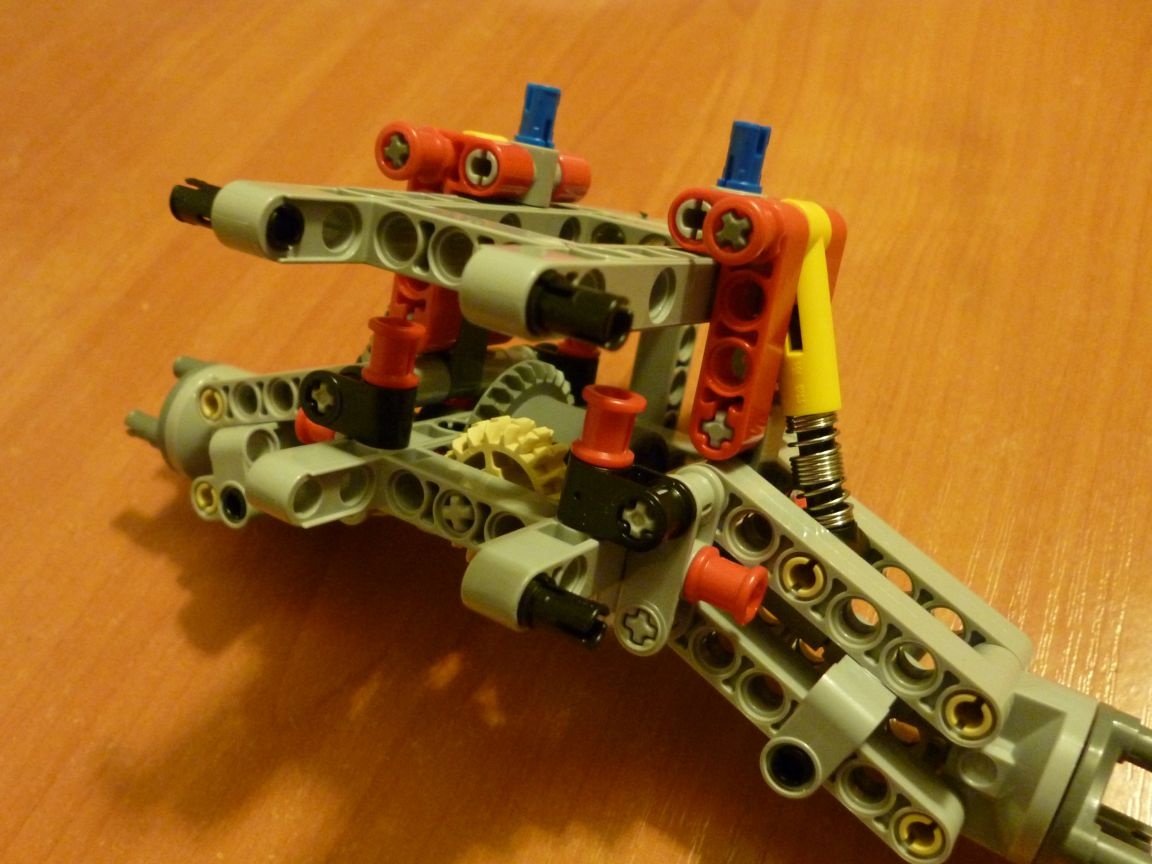
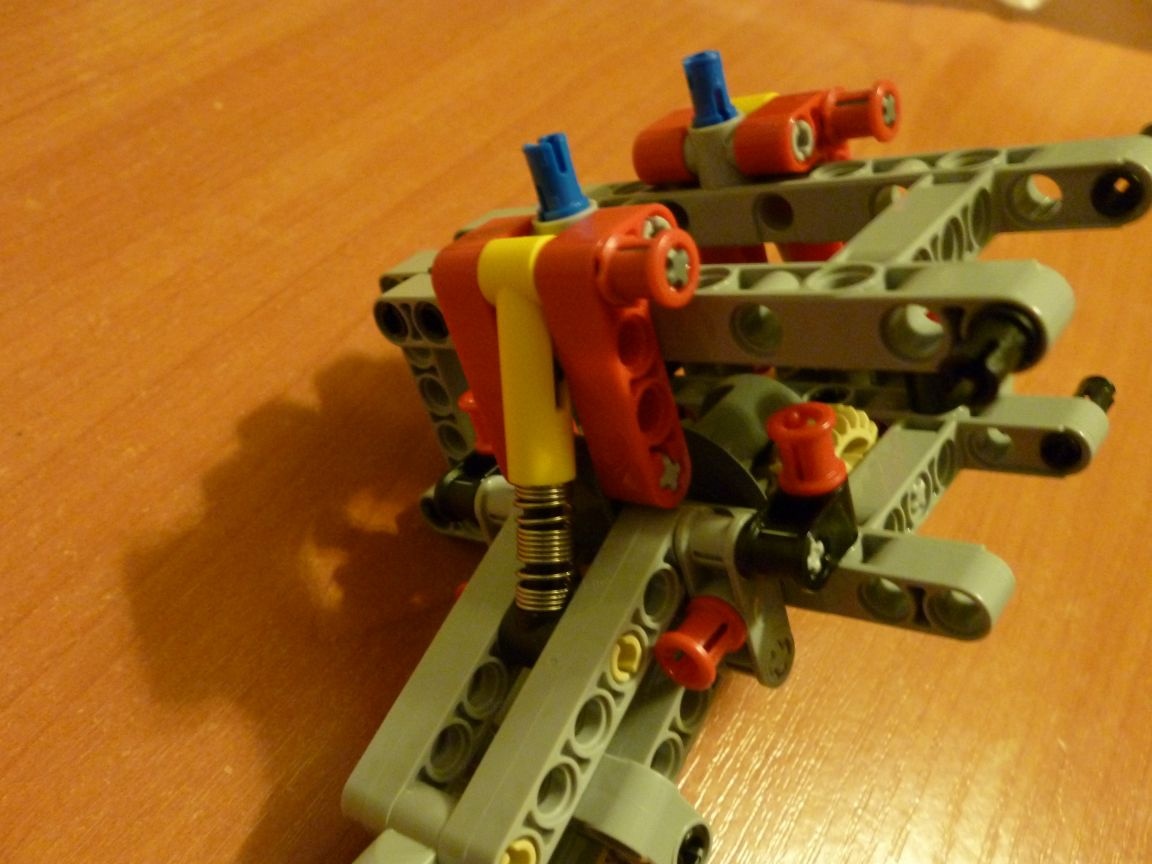
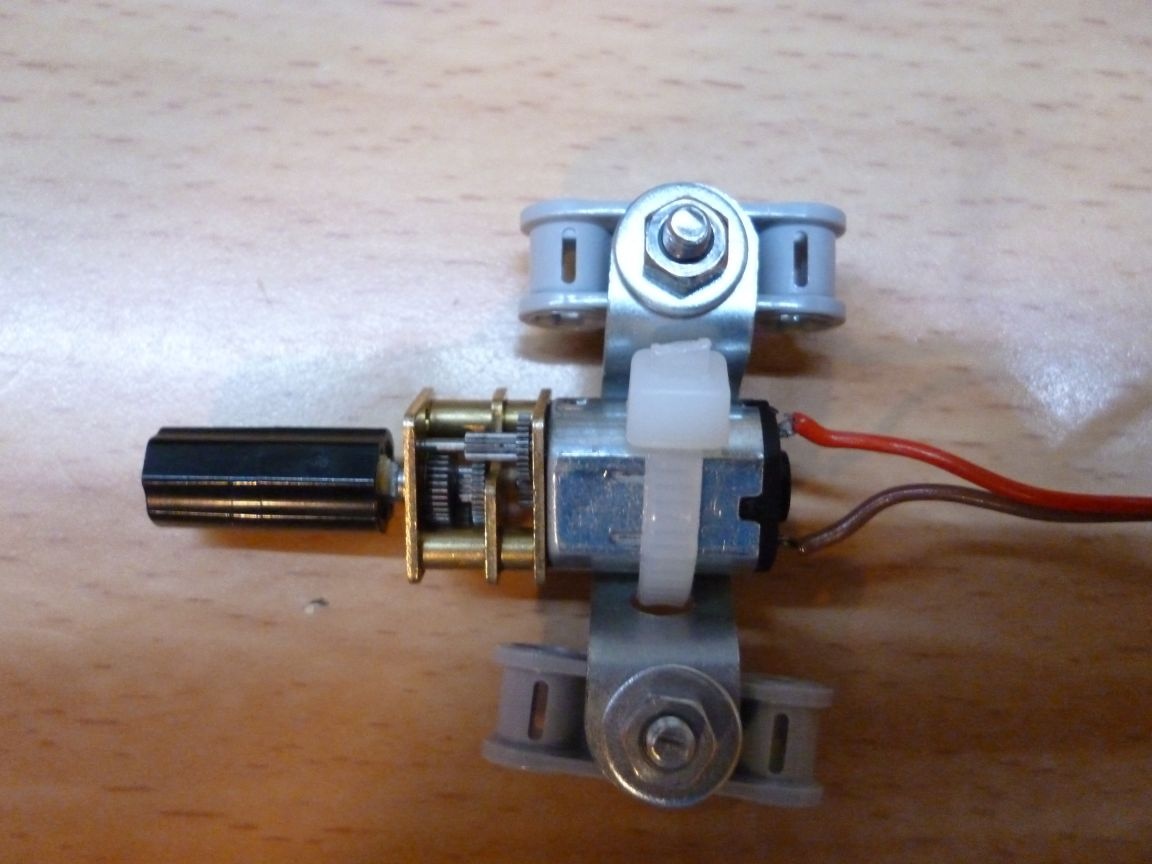
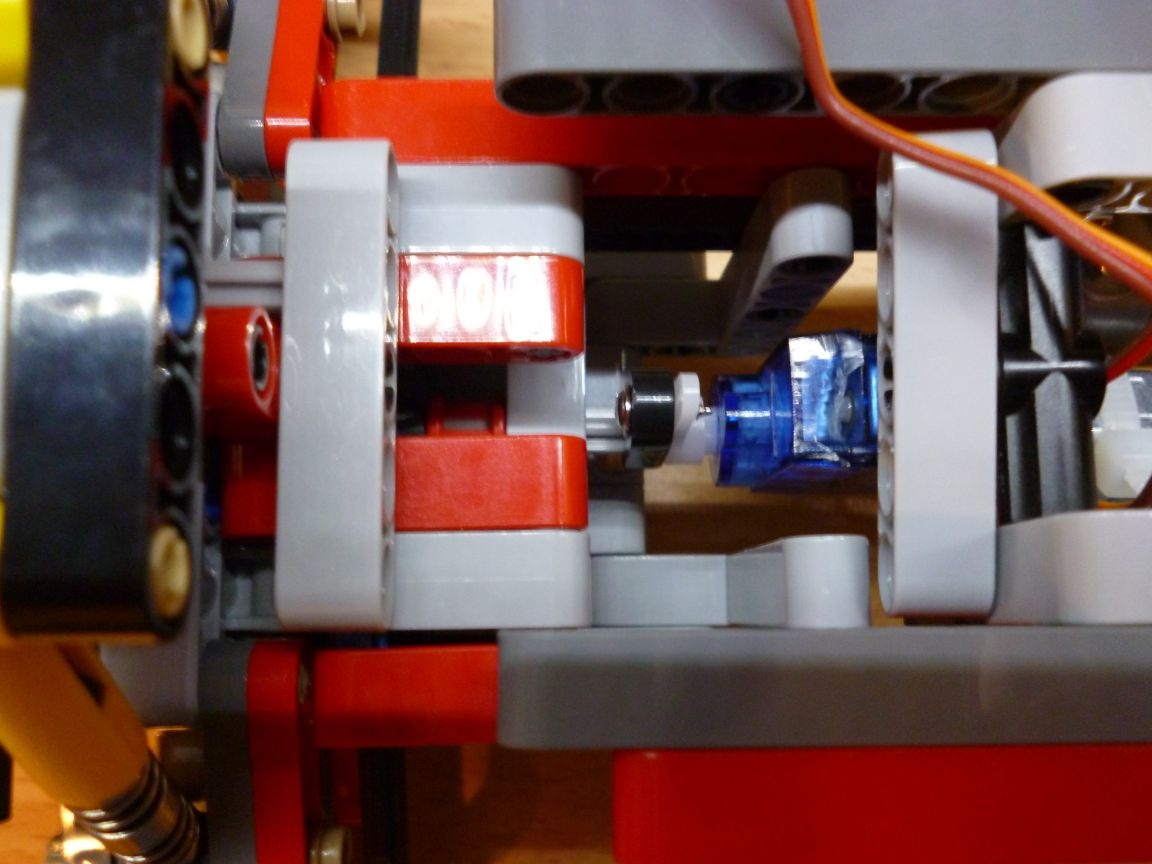
Am rezolvat problema conectării motorului de viteză cu piesele proiectantului după cum urmează: am așezat manșonul de conectare pe axa motorului de viteze și am introdus o bucată de chibrit pentru fixare. Pentru montarea motorului angrenajului plastic metalic folosit de la un proiectant de fier și o clemă.
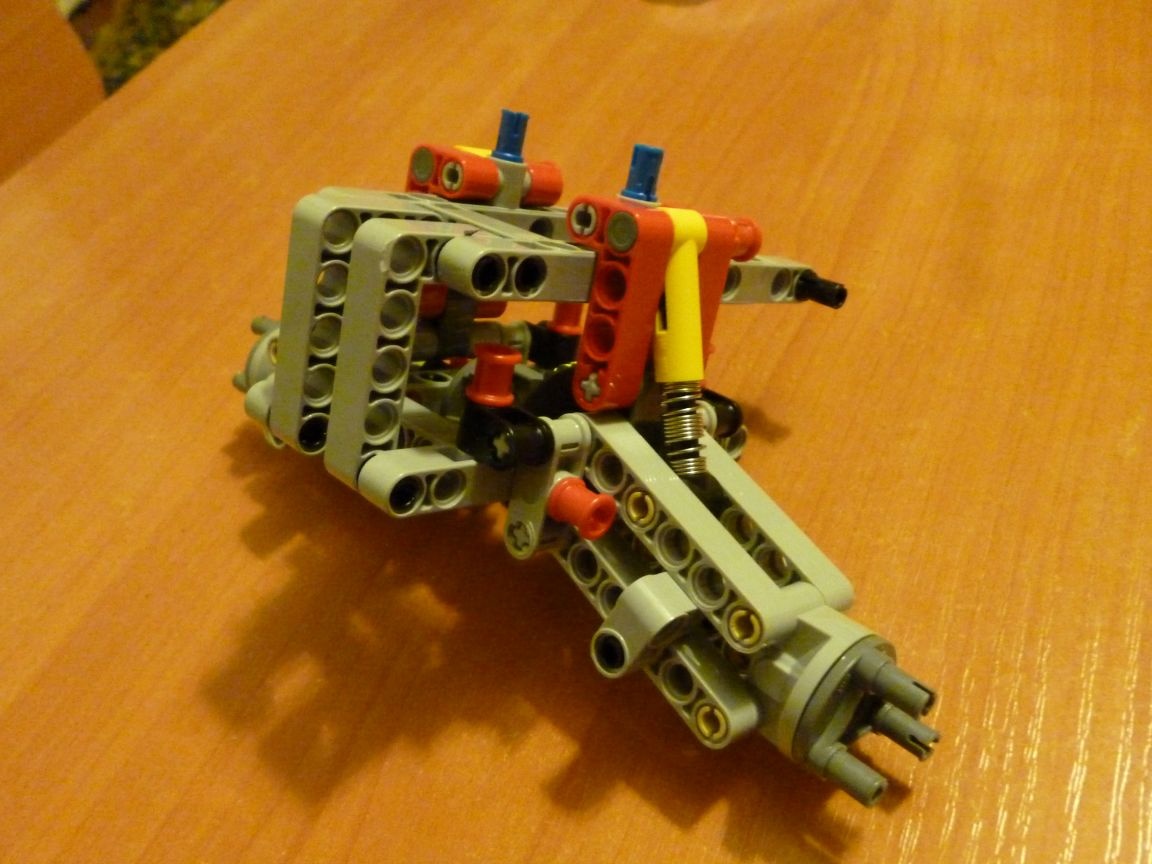
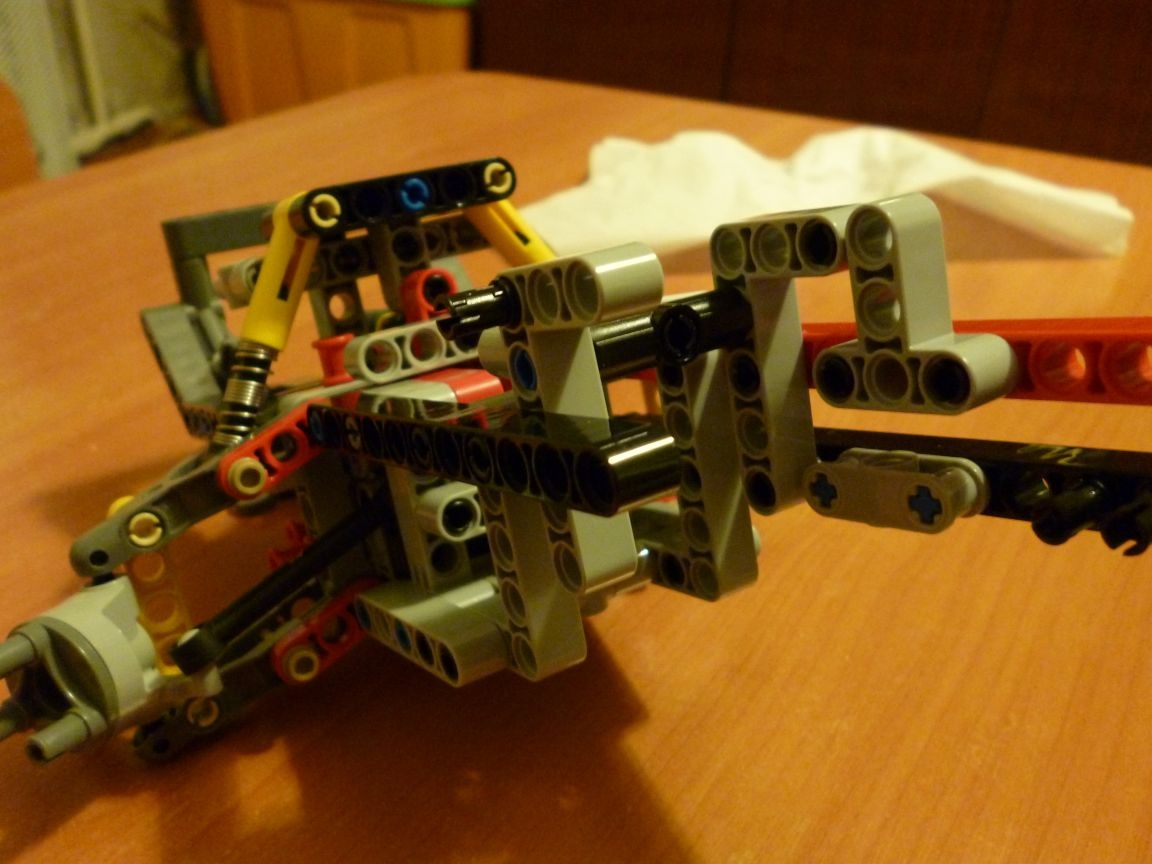
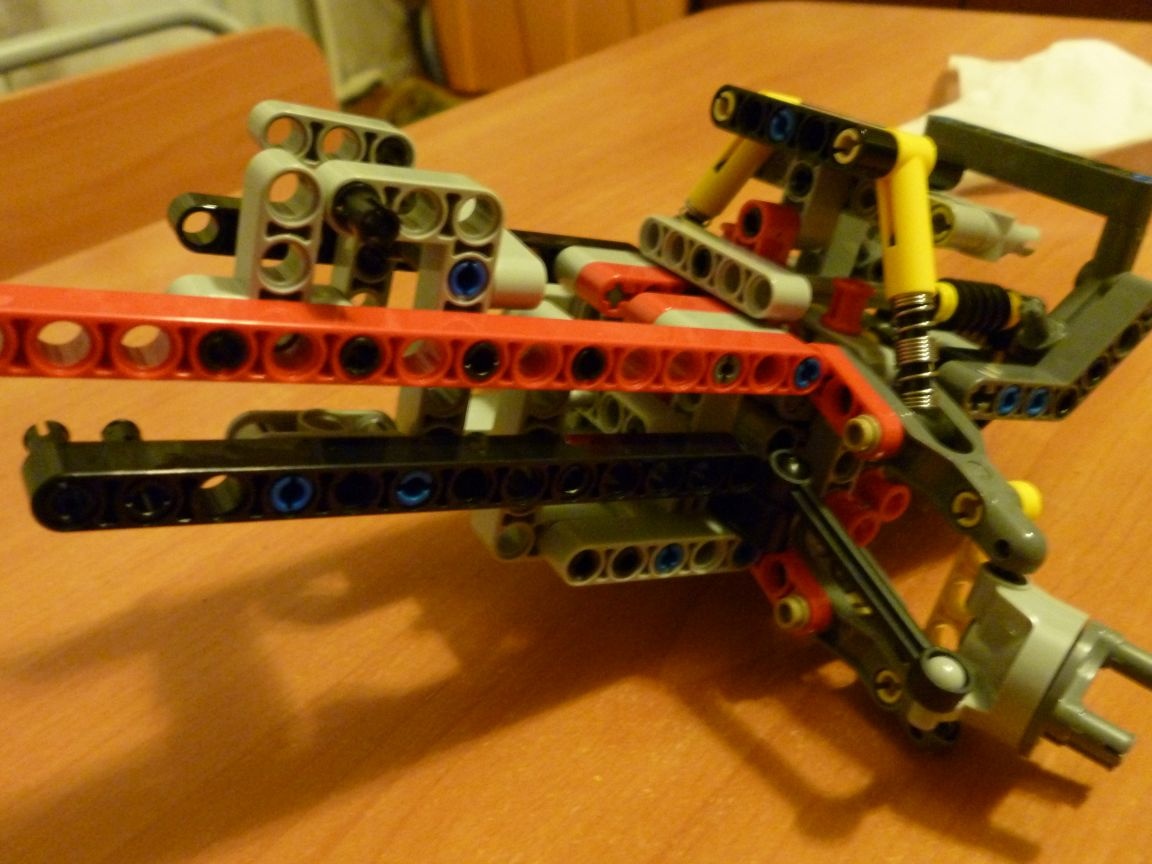
S-a dovedit următoarele:
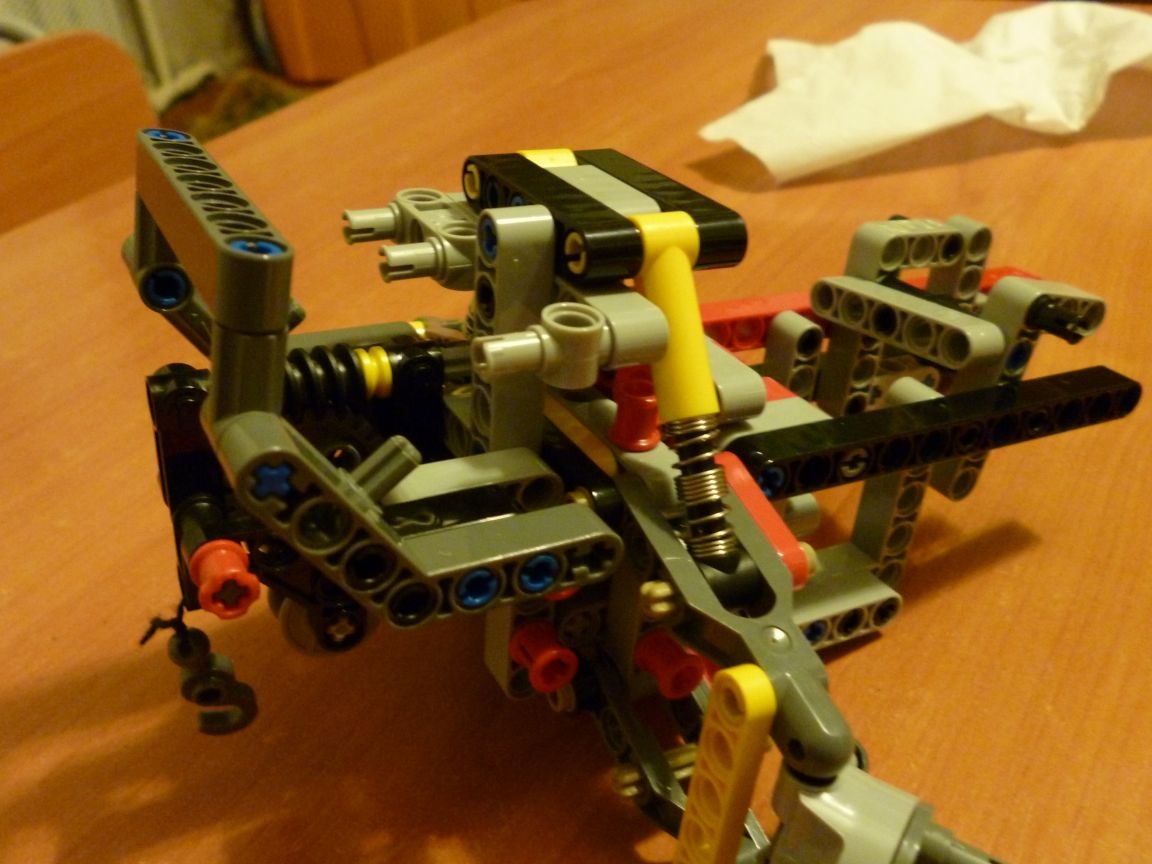
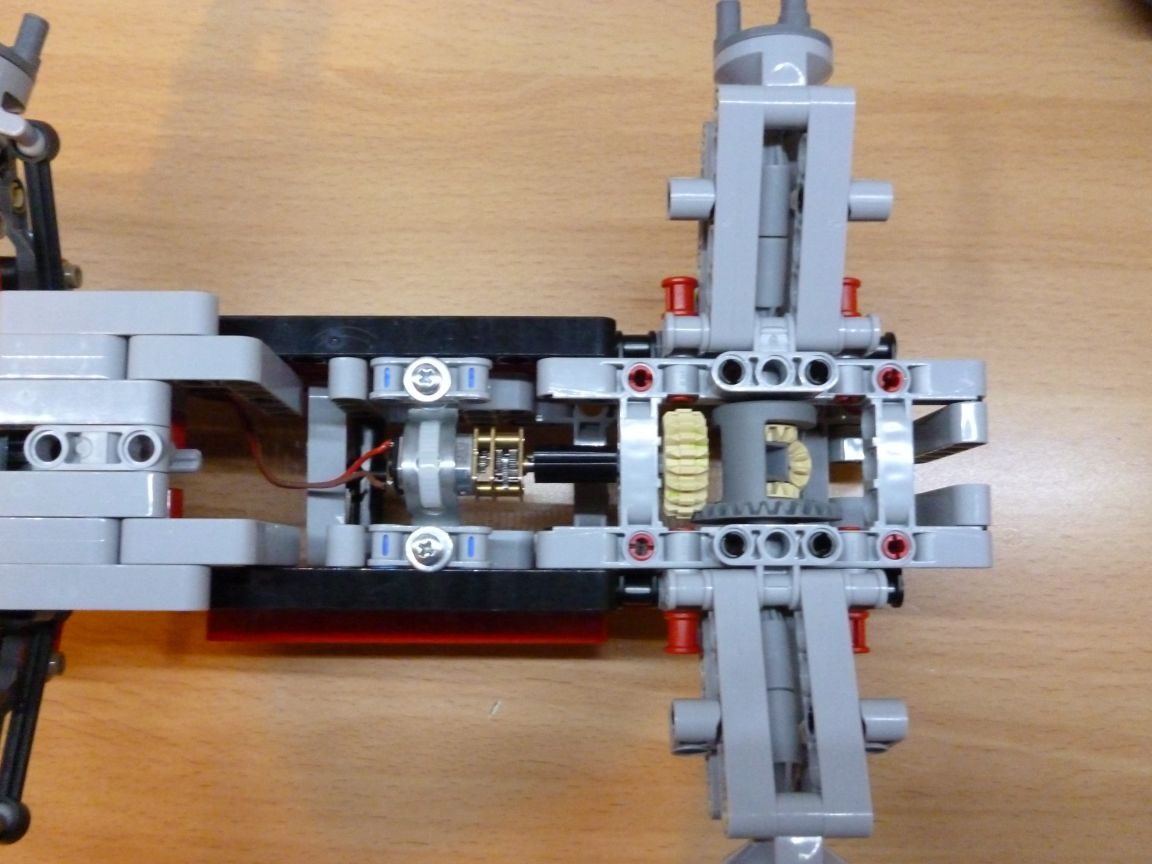
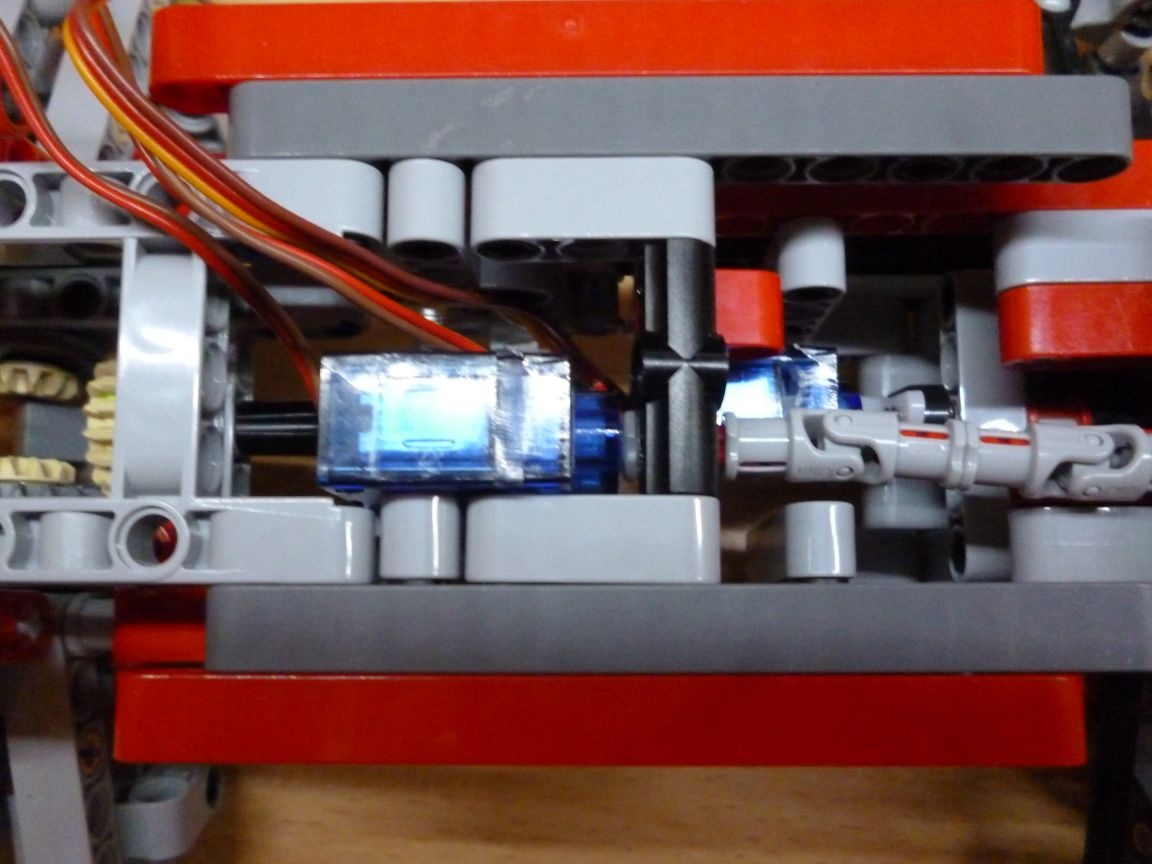
Montare pe șasiu:
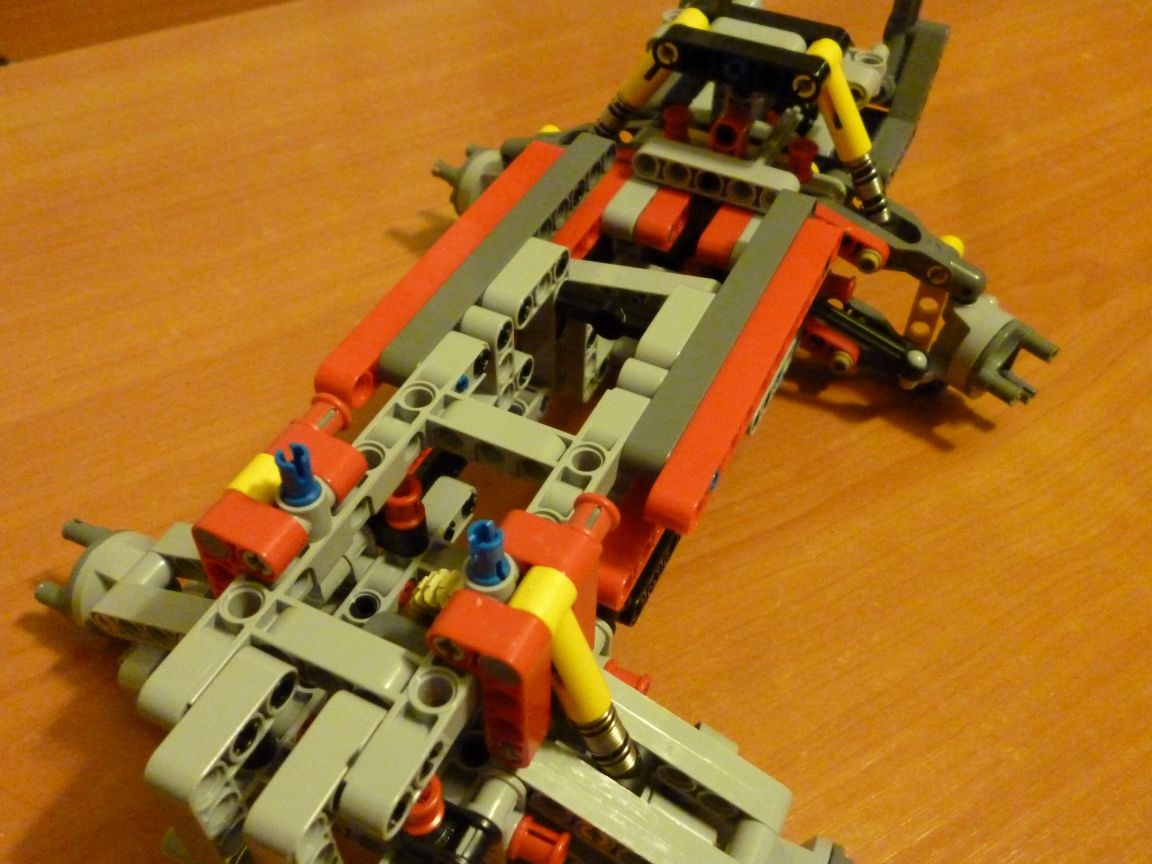
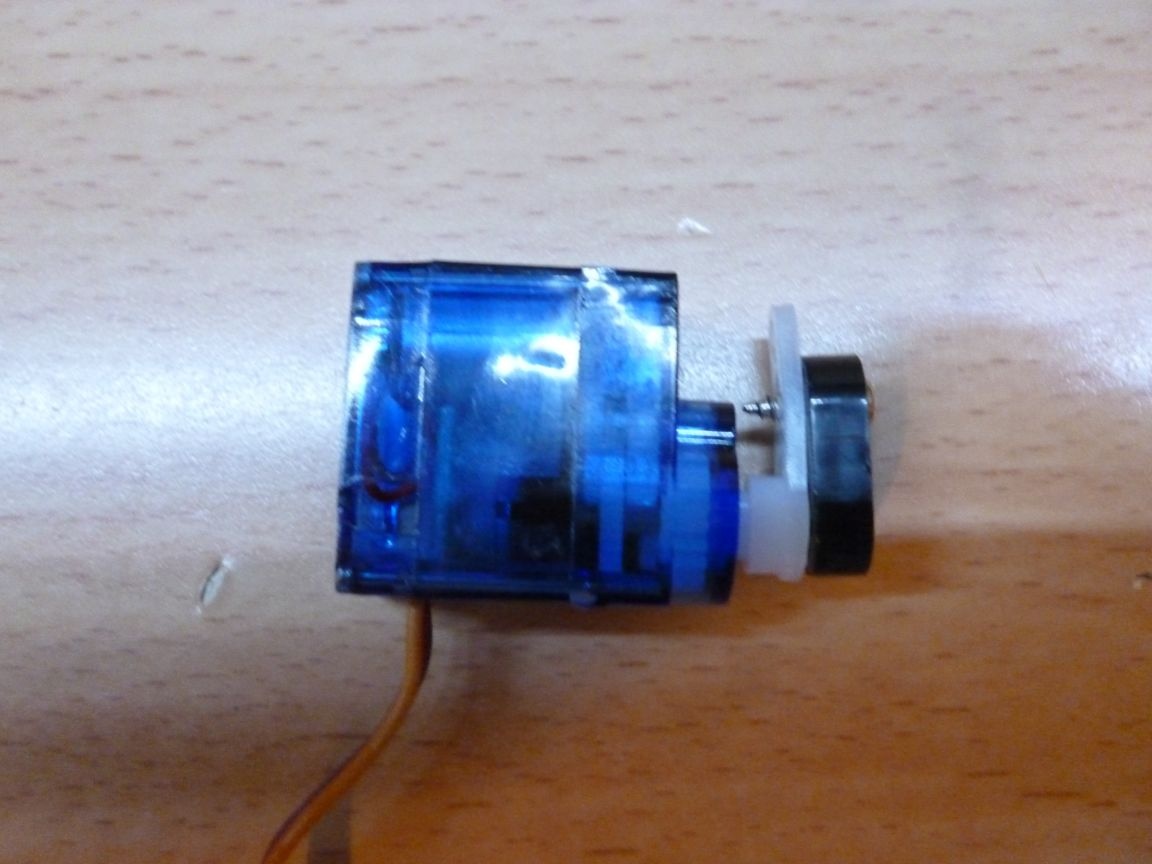
Pentru a efectua rotirea a luat servo SG-90. Este necesar să găuriți cu atenție, pentru a nu atinge părțile interne, o gaură de trecere cu un diametru de 3,2 mm sau doar să tăiați cu un cuțit de papetărie. De asemenea, tăiați părțile proeminente („aripi” pentru fixare). Introducem un șurub în gaura făcută și o fixăm cu piulițe. Pe axul servo am pus o pârghie cu o parte înșurubată din lego:
Set:
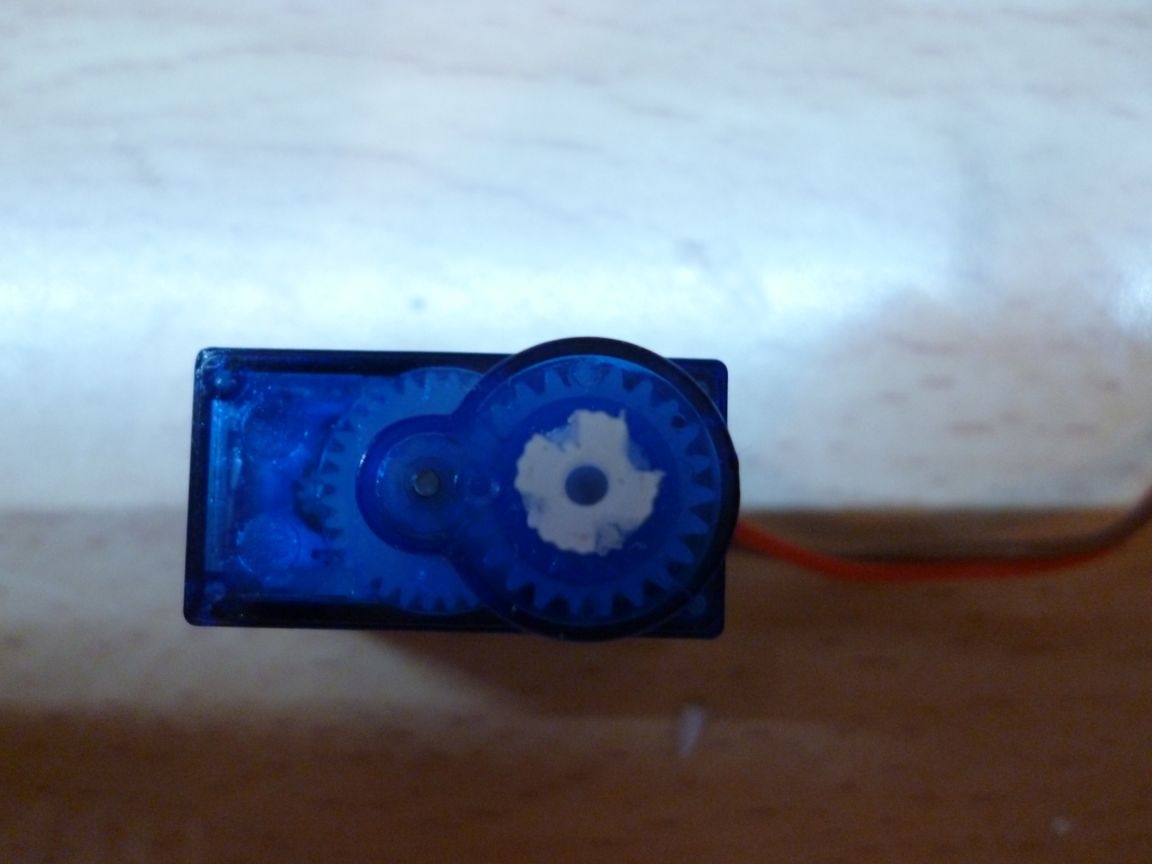
Vom folosi al doilea servo pentru troliu. Procedăm la fel ca și cu primul. Și acum, trebuie modernizat astfel încât să se rotească liber. Pentru a face acest lucru, demontăm servomotorul, scoatem placa și lipim firele direct la motor. Scoatem angrenajul principal și îi tăiem pauzele de călătorie.Și, în sfârșit, realizăm un slot cu un cuțit clerical pe angrenajul principal ca în fotografie:
Ne conectăm la troliu și punem șasiul:

Pasul 4 Gestionarea controlerului
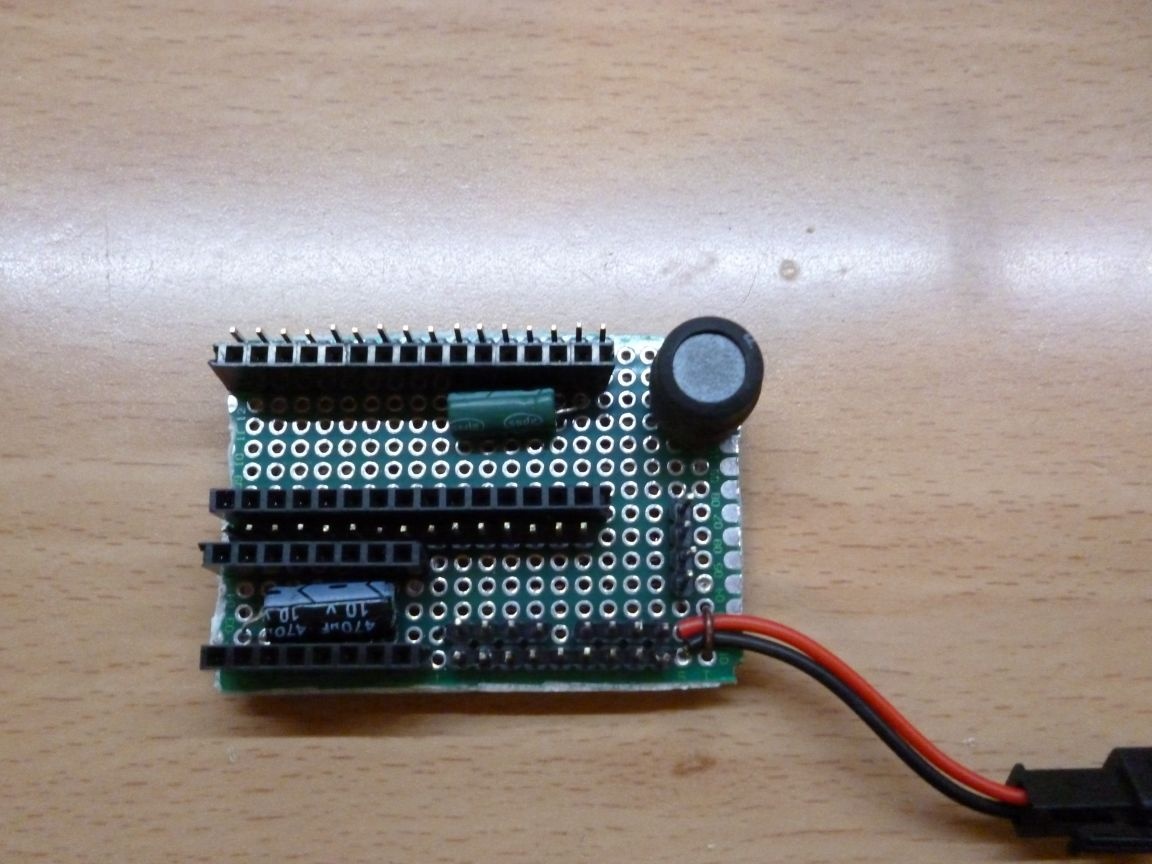
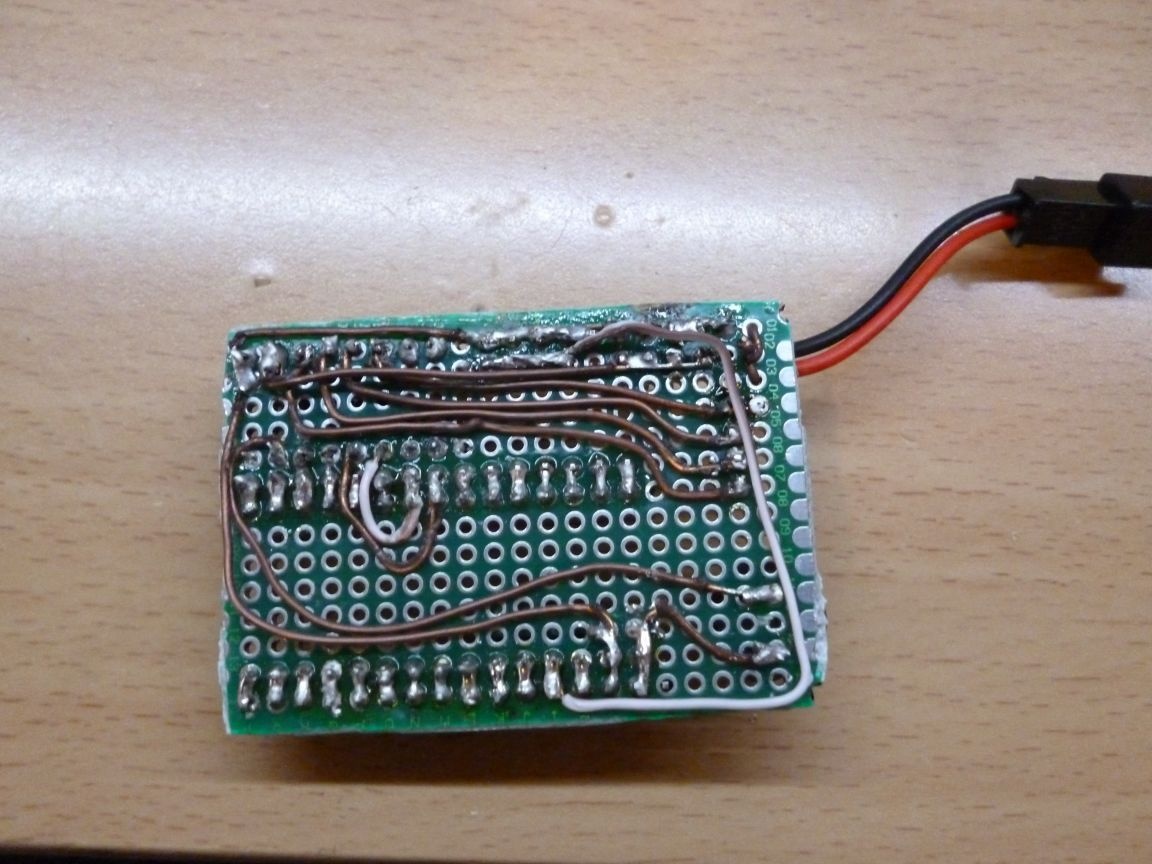
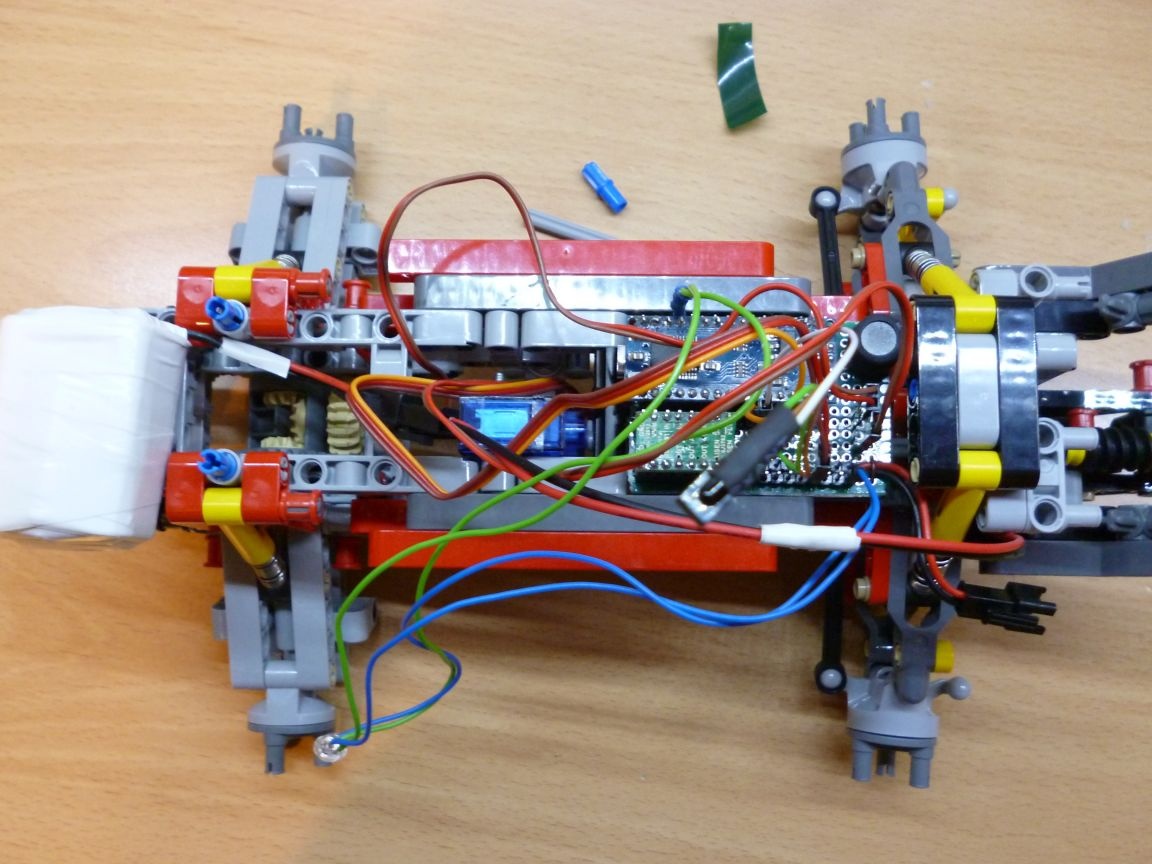
Pentru control vom folosi Arduino și receptorul IR. Luăm un fier de lipit și asamblăm următoarele pe placa de circuit:
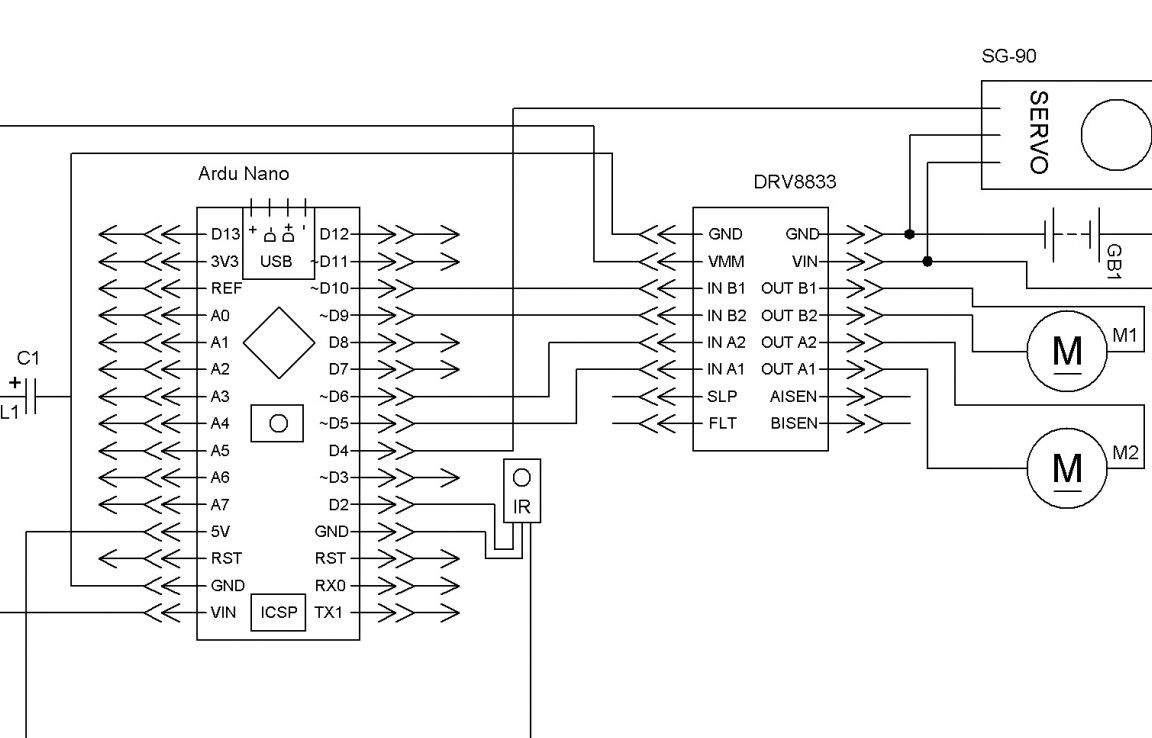
Explic: orice condensator de putere mică, bobina de inductanță pe care o veți găsi, trebuie să stabilizați tensiunea microcontrolerului. Rezistorile sunt selectate pentru ledurile utilizate. Receptorul IR sau TSOP poate fi luat dintr-o jucărie veche, sau cumpărat la un magazin de radio. Dacă există interferențe puternice, adăugați un condensator la circuitul de alimentare al receptorului IR.
Drept urmare, obținem:
Instalăm Arduino Nano și DRV 8833 în locurile lor:
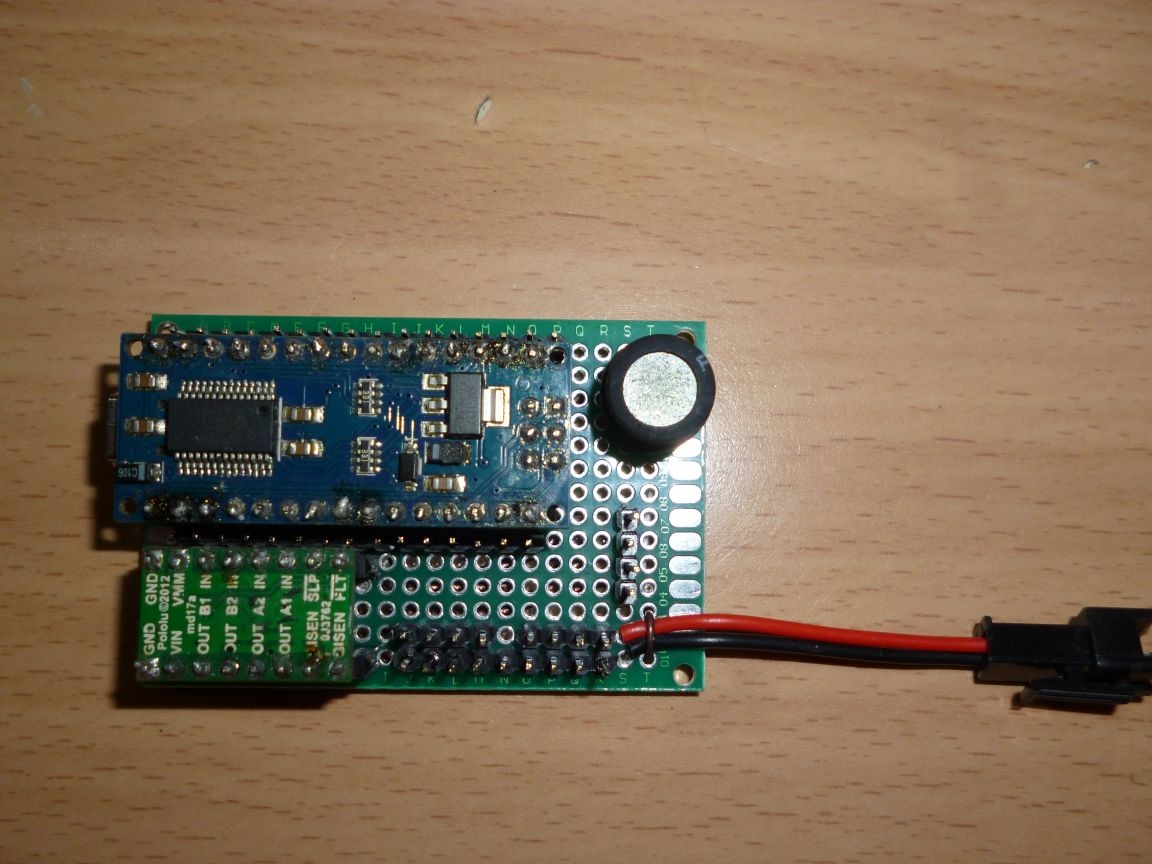
Și puneți placa pe șasiu:
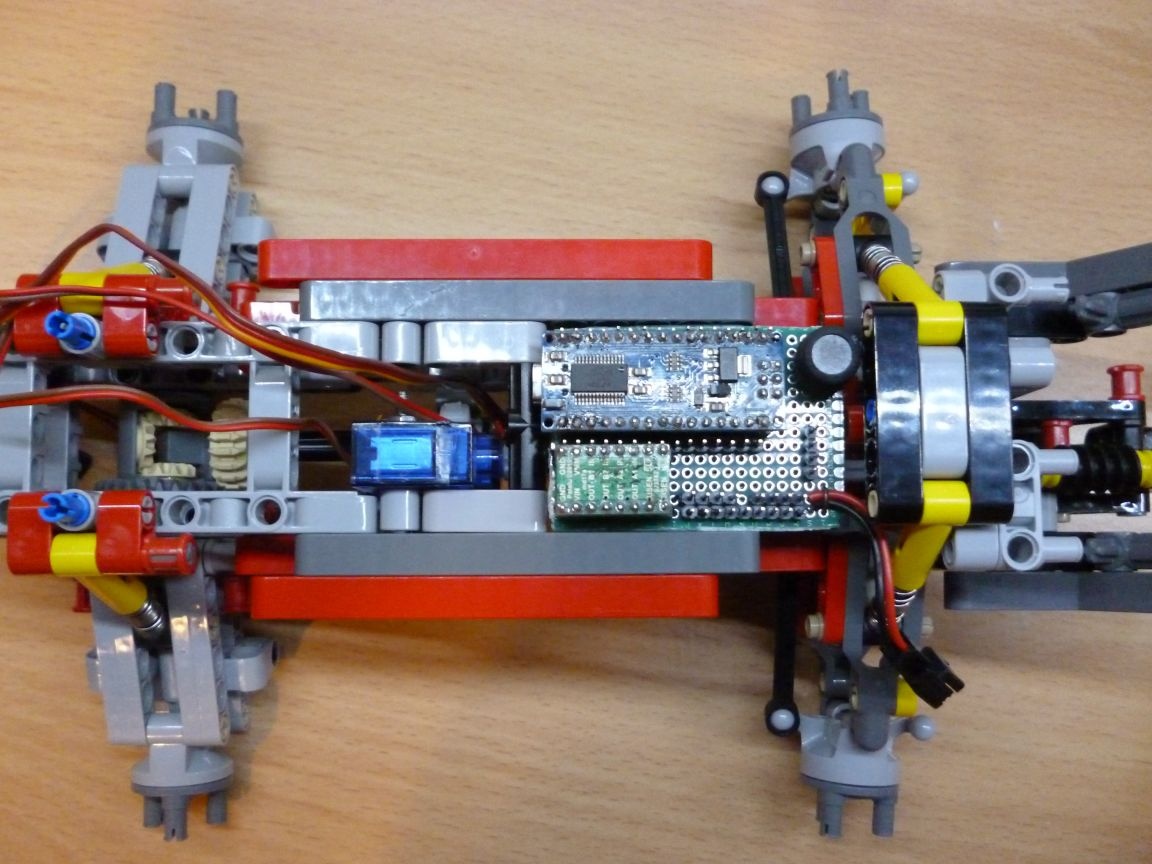
Alimentare - 6 baterii Ni-Mn 1.2v 1000mA. Este necesar să le lipiți în serie și să le înfășurați cu bandă electrică. Adeziv pe banda dublu față în partea din spate a șasiuului.
Conectăm întreaga noastră structură:
Pasul 5 Cabina
Cabina este personal improvizația mea, nu există instrucțiuni pregătite, așa că trebuie să colectați din fotografii.



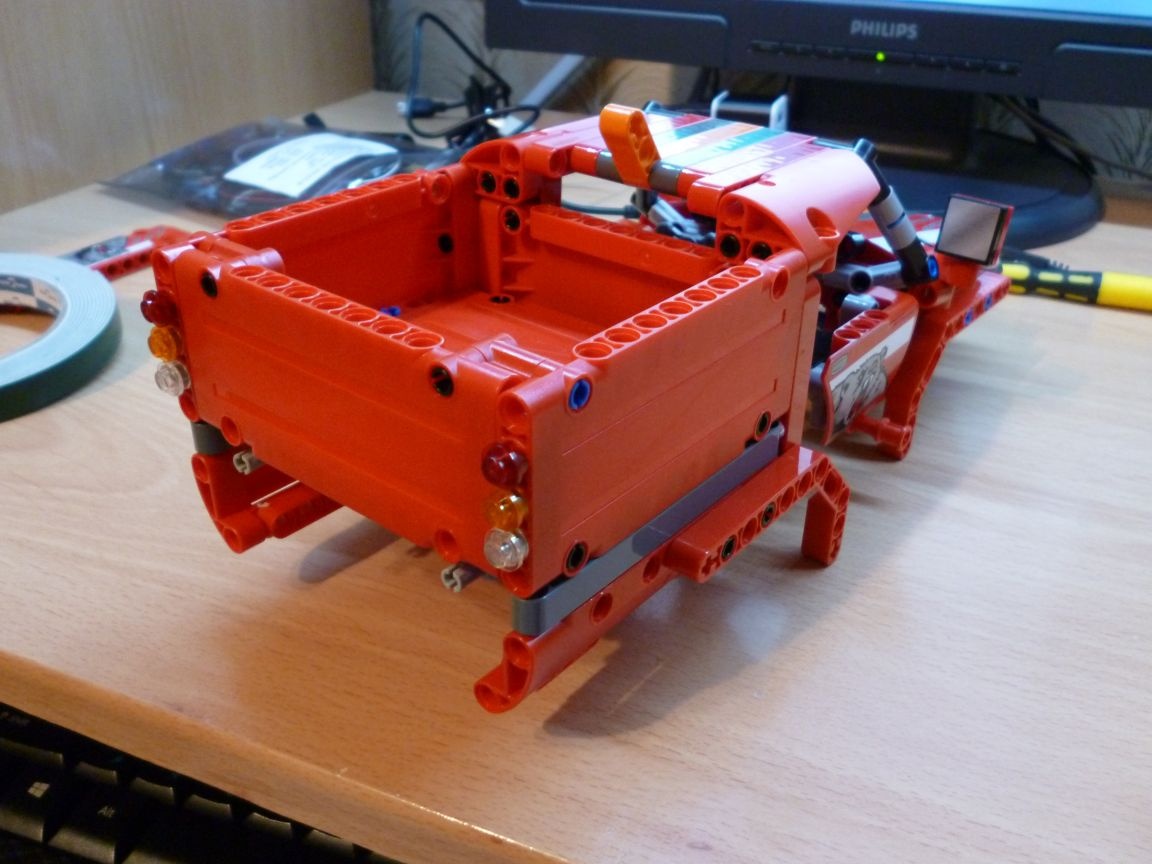
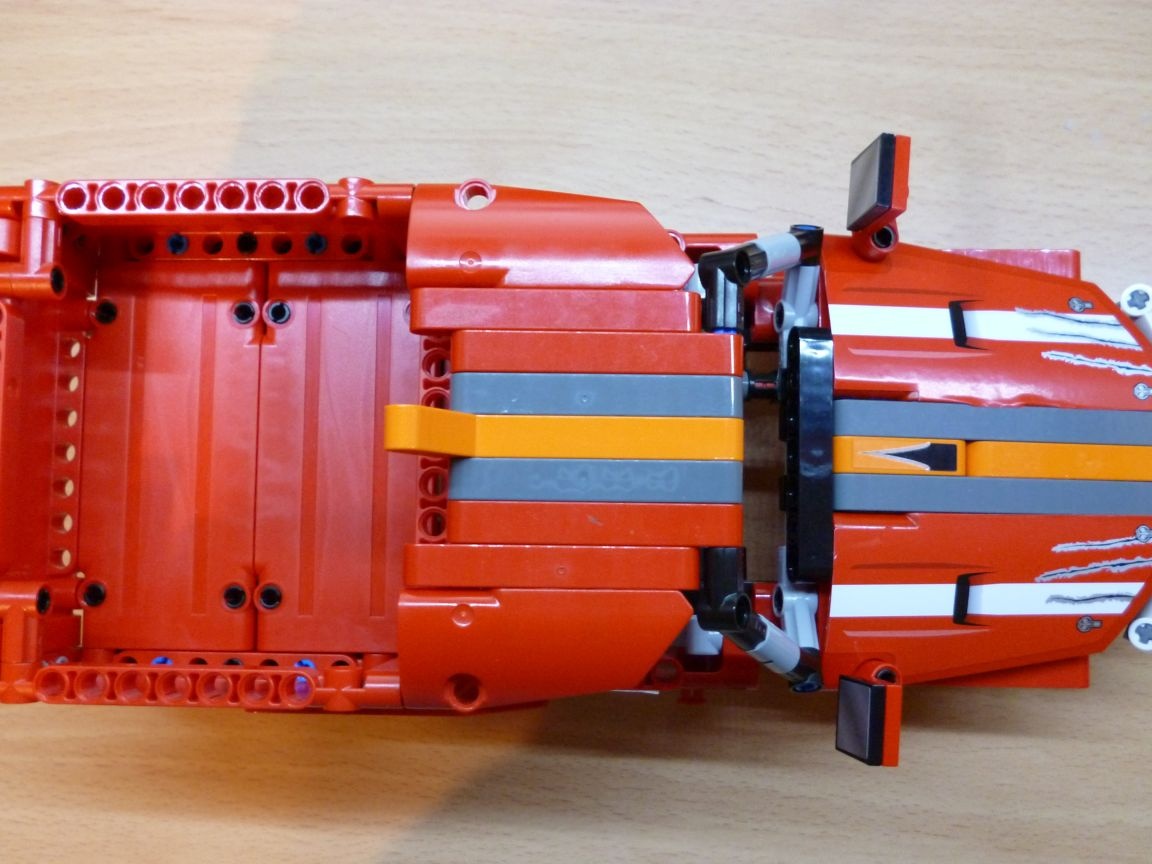
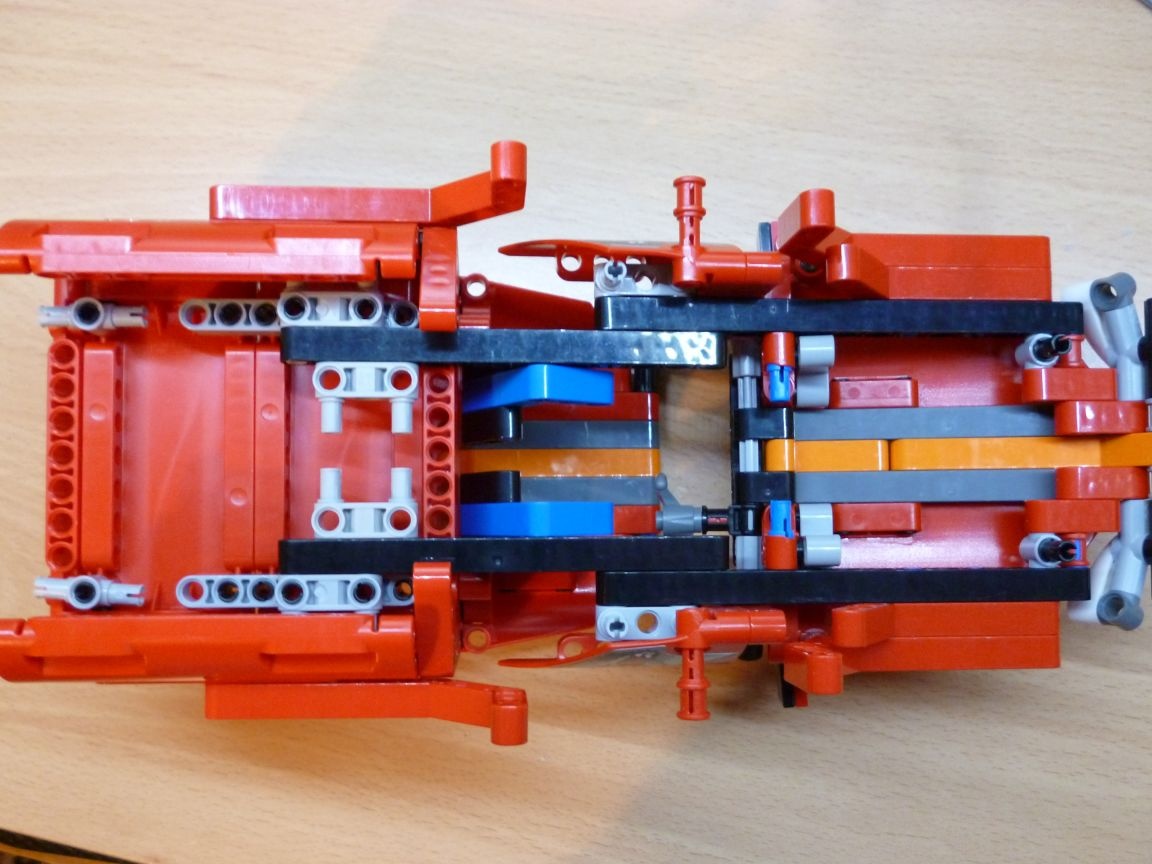
Puteți asambla propria versiune, trebuie doar să o încadrați sub șasiu. Principalul lucru aici este să potriviți montarea cu șasiul. Există patru dintre ele și sunt clar vizibile în fotografie din partea inferioară a cabinei.
Pasul 6 firmware.
Astăzi, însă, ca întotdeauna, programez în IDE Arduino. Mai întâi trebuie să completați firmware-ul meu și prin terminal, uitați-vă la codurile de control de la distanță pe care le veți folosi. Puteți lua orice telecomandă IR, de exemplu de la un televizor, DVD player sau asamblați-vă (aveți o telecomandă de casă de la joystick-ul Sega). Apăsând un buton, în terminal vom vedea codul butonului apăsat, îl vom scrie pe o bucată de hârtie. Facem acest lucru cu toate butoanele pe care dorim să programăm acțiunile. Apoi, editați schița. Notăm codurile noastre în el pentru acțiunile necesare și le aprindem din nou. Acest firmware este configurat pe telecomanda mea Sega. În procesul de joc cu mașina, am observat câteva nuanțe sau inconveniente. Este dificil să obțineți o recepție fiabilă a comenzilor IR în timpul deplasării. Și se întâmplă astfel: apăsați săgeata în față, mașina a primit o comandă să meargă și s-a repezit înainte, a eliberat săgeata, dar nu a primit o comandă de oprire și continuă să conducă până când se prăbușește sau se blochează, este plină de defecțiuni. Parțial, această problemă poate fi rezolvată prin creșterea numărului de încercări de trimitere a unei comenzi, cu toate acestea, acest lucru este posibil numai atunci când utilizați singur telecomanda. Dar voi alege o soluție mai cardinală - voi trece la utilizarea unui receptor de 433MHz - receptor. Voi scrie despre acest lucru în articolul următor.
Pasul 7 pune roți.
Deci, trebuie doar să punem cabina pe șasiu, să punem roțile și să verificăm SUV-ul nostru în acțiune.

