

Recent, am descris fabricarea unui șasiu universal cu șenile. Astăzi vreau să vorbesc mai mult despre conectarea unui modul Bluetooth la șasiul nostru. Și iată el însuși:

Pentru a implementa acest lucru de casă trebuie să facă un șasiu. Fabricare detaliată, care este descrisă aici
În plus, aveți nevoie de următoarele:
- Modul Bluetooth HC-XX (sau clonele sale)
- telefon Android
- Cabluri de conectare "mama - mama"
Pasul 1 selectarea modulului.
Există multe module Bluetooth. Și toată lumea are caracteristici diferite. Pe scurt, lista arată astfel:
- HC-03, HC-04 (HC-04-M, HC-04-S) pe cipul BC417143 - pentru aplicații industriale;
- HC-05, HC-06 (HC-06-M, HC-06-S) pe cip BC417143 - pentru uz comercial;
- HC-05-D, HC-06-D (cu o tablă de depanare pentru evaluare și testare);
- HC-07 - un modul cu cip CSR 41C6, conceput pentru a înlocui HC-06 (complet compatibil cu acesta);
- HC-08 - modul cu consum de energie foarte scăzut și protocol Bluetooth 4.0;
- HC-09 este cel mai nou modul conceput pentru a înlocui HC-06 și HC-07.
Scurtele caracteristici ale modulelor:
- cip Bluetooth - BC417143 fabricat de
- protocol de comunicare - Specificația Bluetooth v2.0 + EDR;
- raza de acțiune - până la 10 metri (nivel de putere 2);
- Compatibil cu toate adaptoarele Bluetooth care acceptă SPP;
- cantitatea de memorie flash (pentru stocarea firmware-ului și setărilor) - 8 Mbit;
- frecvența semnalului radio - 2,40 .. 2,48 GHz;
- interfață gazdă - USB 1.1 / 2.0 sau UART;
- consum de energie - curentul în timpul comunicării este de 30-40 mA. Valoarea curentă medie este de aproximativ 25 mA. După stabilirea comunicării, consumul curent este de 8 mA. Nu există modul de somn.
Cele mai accesibile module Bluetooth astăzi sunt HC-05 și HC-06. Sunt abundente în magazinele online chineze. Diferențele dintre ele sunt că primii pot funcționa atât în modul master (slave), cât și în modul slave (master). Al doilea este un dispozitiv pur sclav. Cu alte cuvinte, HC-06 nu poate detecta un dispozitiv împerecheat și poate stabili o conexiune cu acesta, el poate asculta doar de master.
De obicei, modulele sunt vândute sub formă de două plăci lipite. Cel mai mic este un modul din fabrică, utilizat pe scară largă în diverse electronic dispozitive. Mare - o panou special pentru bricolaj. Arată ca o placă mai mică, cu un cip BC417:

Și astfel modulele DIY HC-05 și HC-06:

În principiu, puteți utiliza orice modul doriți. Un modul fără o placă de pană costă mai puțin, dar va trebui să aveți grijă de sursa de alimentare de 3,3 V pentru modul și să vă chinuiți prin lipirea firelor către modul, deoarece bornele sunt foarte apropiate. Am ales optimul, după părerea mea, în raportul preț / funcțional HC-06.

Conectare la pasul 2
Ne conectăm după cum urmează:
Arduino Nano Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND - GND
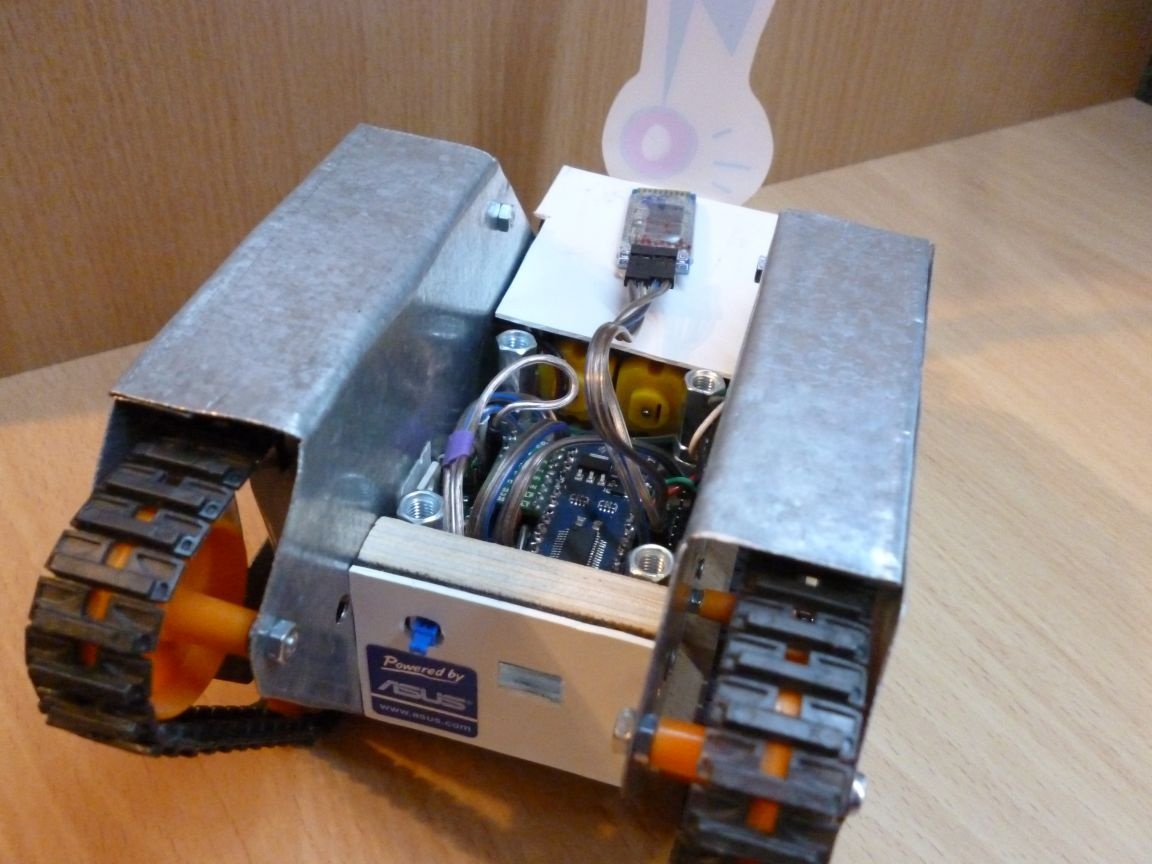
Pentru comoditate, lipiți modulul pe o bandă cu două fețe din șasiu:
Instalarea modulului pasul 3
Pentru o funcționare corectă, modulul trebuie configurat. Vom configura comenzile AT introduse în fereastra terminalului. Dau un exemplu de configurare a modulului HC-06. Dacă aveți una diferită, setările pot diferi. Pentru ca modulul nostru să primească comenzi, mai întâi blițăm Arduino cu următorul firmware:
În acest caz, Arduino acționează ca o punte de legătură între computere și modul. În firmware, folosesc biblioteca SoftwareSerial. La viteze mari, funcționează instabil. Dacă doriți o viteză mare, puteți conecta modulul direct la contactele Arduino RX și TX și rescrie firmware-ul. Dar în cazul meu, vom lucra cu modulul cu o viteză de 9600. În opinia mea, acest lucru este suficient. Deci, după firmware, deschideți terminalul și introduceți:
„AT” (fără ghilimele) trebuie să vină răspunsul „OK” (atunci totul este conectat corect și modulul funcționează).
„AT + BAUD96000” (fără ghilimele) ar trebui să vină răspunsul „OK9600”.
Dacă aveți răspunsul corect, treceți la pasul următor.
Pasul 4 firmware.
Pentru a scrie firmware-ul și firmware-ul în sine, folosesc IDE-ul Arduino. Versiunea actuală pentru astăzi este 1.8. Am postat mai multe opțiuni de firmware:
BT_RobotControl - pentru Robot Control pe Android
BT_WASD - pentru control de la un computer, trimiterea de comenzi prin terminal.
Pasul 5 configurează-ți telefonul.
Pe un telefon Android, trebuie să instalați un program pentru a controla robotul prin Bluetooth. Sunt foarte mulți. Puteți introduce „Bluetooth Arduino” în Google play și alege după gustul dvs. Mi-a plăcut controlerul BT. Descărcați și instalați pe telefonul sau tableta dvs. Android. În continuare, prin setările Android, trebuie să stabiliți o conexiune cu modulul nostru. Parola pentru conexiune este „1234” sau „0000”.
Etapa 6 instalarea computerului. (dacă este necesar)
Dacă este necesar, sau doar comoditate pentru control, puteți utiliza un computer sau un laptop. Pentru a face acest lucru, computerul trebuie să aibă Bluetooth. Stabilim comunicarea cu modulul nostru prin intermediul controalelor de pe computer. În continuare, avem nevoie de un terminal pentru a trimite comenzi. Orice convenabil pentru tine. După scrierea firmware-ului BT_WASD, controlul se realizează prin următoarele butoane (comenzi):
w înainte
e - stânga și înainte
q - dreapta și înainte
s - înapoi
z - înapoi și în stânga
x - înapoi și dreapta
a - lăsat în loc
d - chiar în loc
f - oprire
Introducerea constantă a comenzilor este incomodă, așa că recomand să utilizați programul pentru a trimite comenzi. Folosesc Z-Controller. În program, selectați portul (port com prin care se realizează conexiunea) și configurați tastele pentru comenzi. Configurați-vă inactiv și intuitiv.
Sper că a fost interesant și util.
