Maestrul s-a interesat de mult de modelele de avioane. La început a fost un model de aeronavă, apoi patrucoptere. În acest articol, vrăjitorul vă va spune ce materiale să alegeți pentru un quadrocopter, precum și cum să faceți un cadru din placaj. Haideți să urmărim un scurt videoclip demonstrativ.
Pentru a realiza un quadrocopter, maestrul a folosit următoarele
Instrumente și materiale:
-Placaj din lemn;
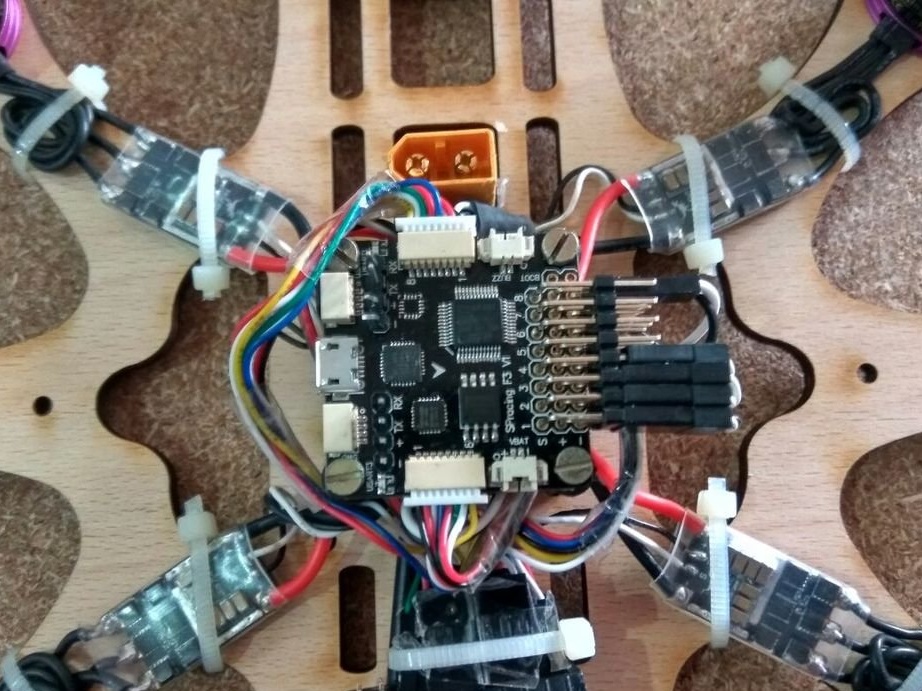
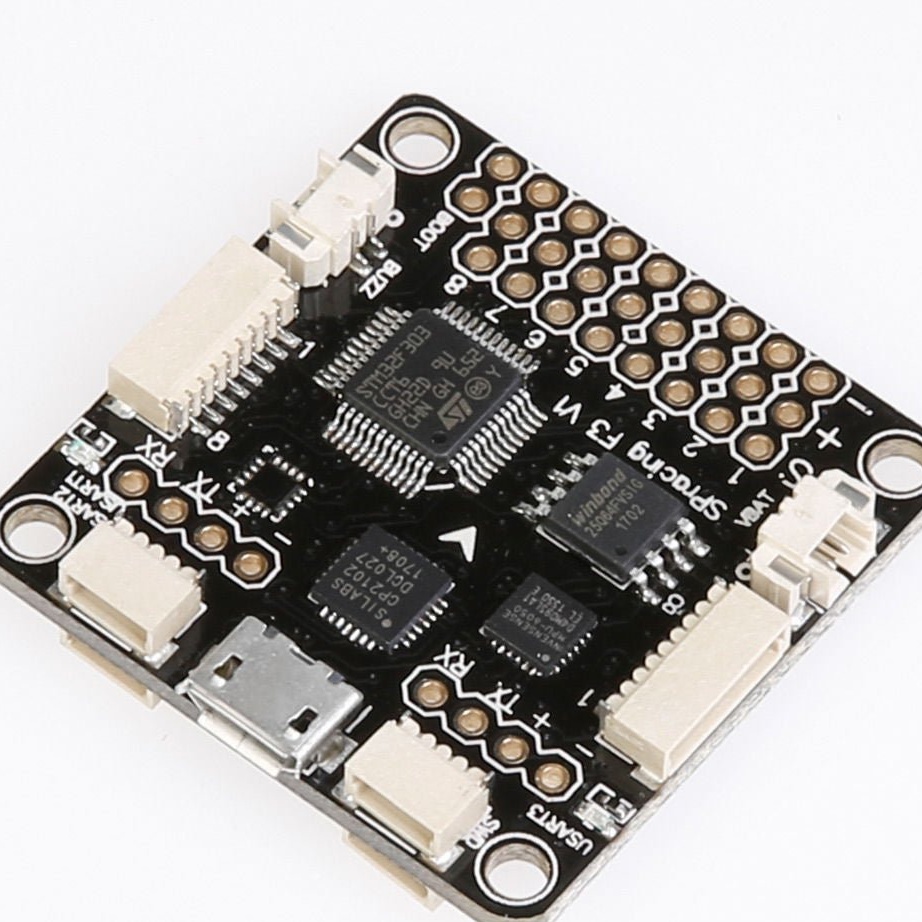
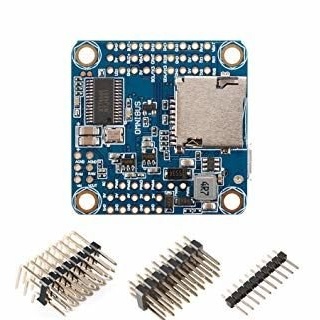
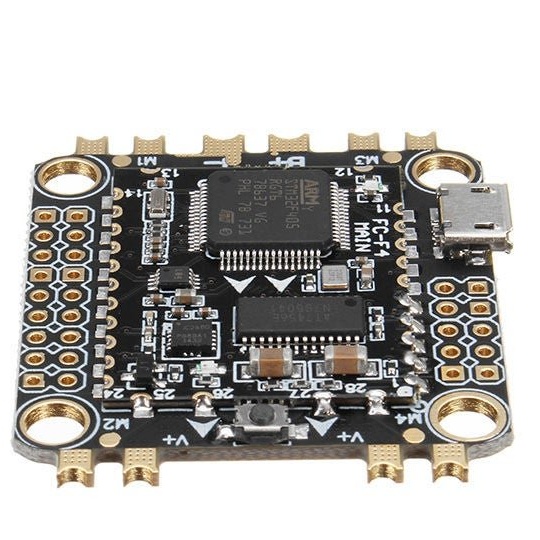
-Controller Omnibus F4, SP Racing F3;
- placa de distribuție a energiei electrice;
- Regulator HGLRC 28A BLHeli ESC - 4 buc;
- Motor Racestar BR2204 2600Kv Racing Edition -4 buc;
- Elice KingKong 5X4X3 - 4 buc;
- Modul radio Flsky TH9X cu receptor;
Baterii Gens 3800 mAh;
rezistent; - 16 buc;
-Suruburile M3;
- surubelnita;
-Accesorii de vânzare;
-Nozh;
- freză CNC;
Pasul întâi: selectarea materialelor
Frame.
De obicei, cadrul este format din componente ușoare și rigide, cum ar fi fibra de sticlă, fibra de carbon, lemn, aluminiu, etc. Există multe tipuri diferite de cadre, maestrul va realiza un cadru pentru patru motoare.
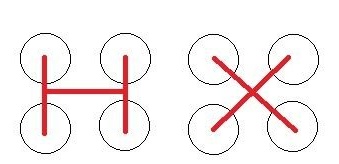
Astfel de cadre sunt în principal în formă H sau X. Forma X este un echilibru bun între stabilitate și manevrabilitate. Acest cadru îl va realiza maestrul.
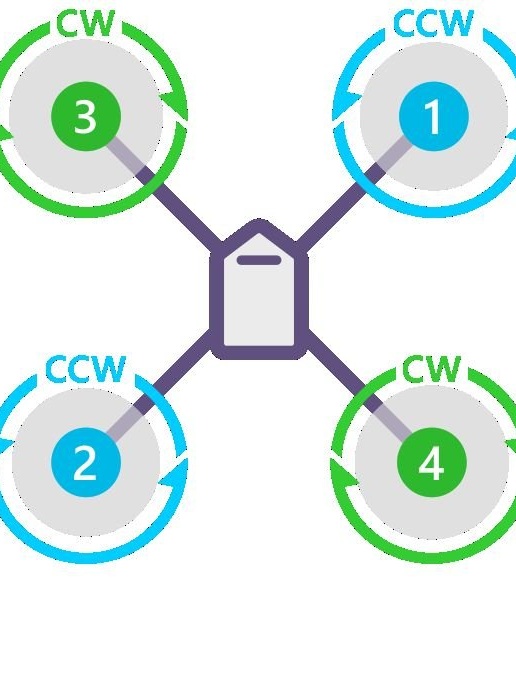

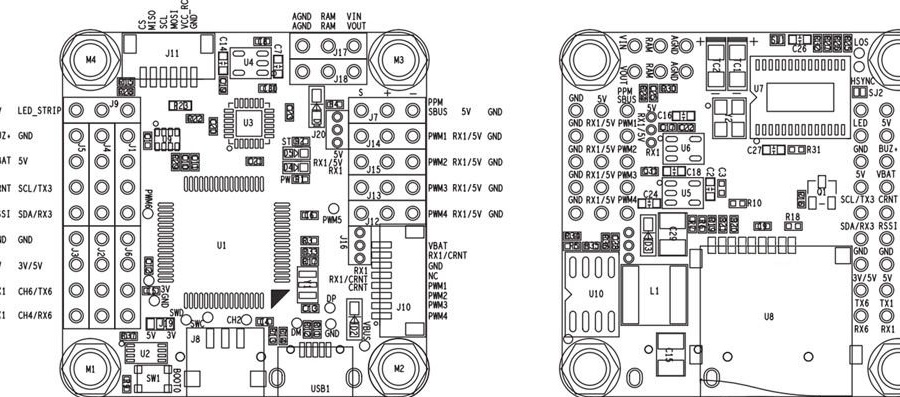
Controller.
Controlerul controlează funcționarea motoarelor. Diagrama arată că toate motoarele se rotesc în direcții opuse pentru a neutraliza cuplul generat de fiecare motor. Controlerul este creierul unui quadrocopter, este practic un mic computer care își folosește senzorii pentru a măsura constant unghiul și viteza.
Regulatoarele de zbor sunt clasificate în principal în conformitate cu specificațiile procesorului.

Motoare.
Există două tipuri de motoare, motoare fără perii și motoare fără perii. Cele mai multe quadrocoptere folosesc motoare fără perie, care pot răspunde foarte rapid la modificările cerințelor de turație și cuplu. Pentru motoarele fără perii, speciale electronic controler de viteză (ESC).
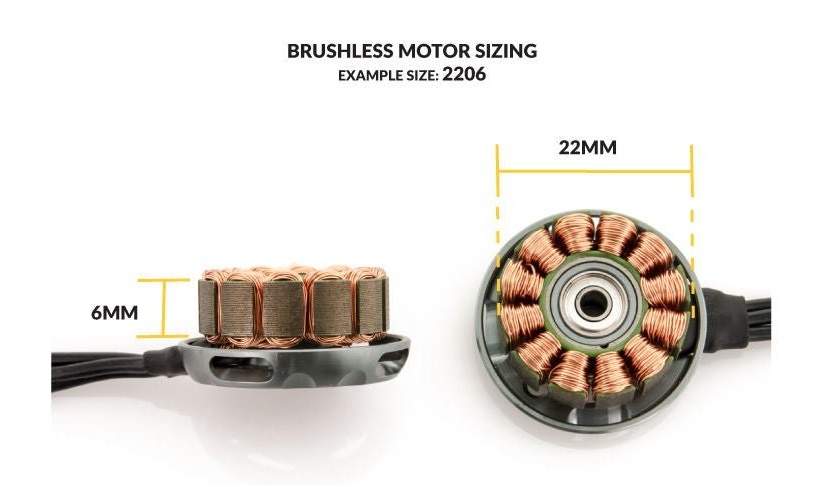
Dimensiunea motoarelor fără perie este indicată de un număr format din 4 cifre - AABB. „AA” este lățimea statorului, iar „BB” este înălțimea statorului sau diametrul statorului, ambele în mm (milimetri). De exemplu, Racestar BR2205 are un stator cu un diametru de aproximativ 22 mm și o înălțime de aproximativ 05 mm.
De fapt, cu cât statorul este mai mare, cu atât este mai mare puterea la viteze mai mari și cu cât este mai larg stator, cu atât cuplul la viteze mai mici.
Valoarea KV a motorului indică viteza cu care motorul se va roti atunci când aplicați 1 volt la înfășurările sale.Este determinat de numărul de înfășurări ale firului de cupru din statorul motorului și de forța magnetică a magneților.
Mai puține înfășurări înseamnă o rezistență mai mică și, prin urmare, un turație mai mare. Acesta este motivul pentru care motoarele cu KV mai mare tind să aibă mai puțin înfășurare statorică.
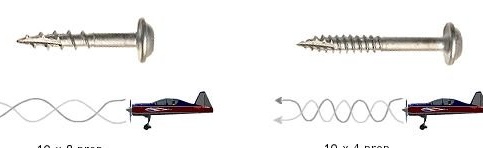
KV stabilește ce șurub poți folosi cu motorul. Cu cât KV-ul este mai mic, cu atât șurubul poate fi mai mare și invers. Nu este posibilă creșterea forței de ridicare prin instalarea unui șurub mai mare pe motor cu un KV mai mare, deoarece cerințele de cuplu vor depăși puterea admisă și motorul se va supraîncălzi.
De exemplu: motoarele BR2205 2600 kV pot funcționa cu șuruburi de 5x4 inci, iar motoarele BR2212 de 1000 kV pot funcționa cu șuruburi de 10x4.5 inch
KV nu este în niciun caz un indicator al puterii motorului, motoarele cu un KV mai mare nu sunt neapărat mai puternice decât motoarele cu un KV mai mic.


Controlere electronice de viteză (ESC).
Progresele recente în mini-quadrocoptere au fost posibile prin apariția micilor regulatoare electronice de viteză care permit funcționarea motoarelor fără perii. Funcționarea regulatoarelor electronice de viteză este de a primi semnalul de accelerație de la regulatorul de zbor și de a menține rotirea motorului la viteza necesară.
O serie de tehnologii funcționează în interiorul acestor dispozitive mici care nu depășesc scopul acestui manual. Când achiziționați, alegeți un ESC cu un curent direct nominal cu cel puțin 20% mai mult decât cel calculat.


Elice.
Elicele convertesc energia mecanică a motoarelor în tracțiune. Mărimea și forma elicei joacă un rol imens în eficiența zborului.
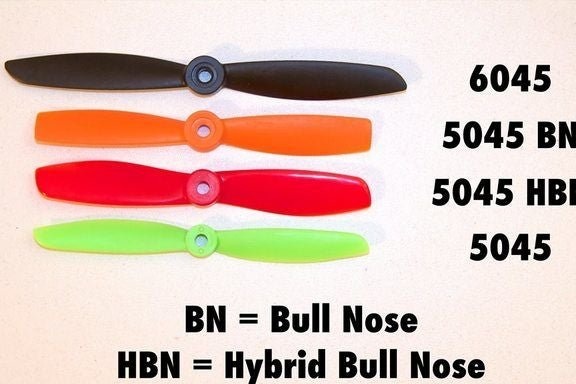
Există 2 tipuri de formate pe care producătorii le utilizează: L x P x B | LLPP x B. Unde, L este lungimea, P este pasul, B este numărul de lame.
Elicele pot fi confecționate din diverse materiale, cum ar fi compozit din plastic, fibră de carbon, lemn, etc. Fiecare tip de material are caracteristici unice, de exemplu, fibra de carbon și lemnul sunt cu adevărat rigide și cunoscute pentru buna funcționare, iar unele materiale plastice sunt extrem de durabile. Majoritatea șuruburilor utilizate în mini-quadrocoptere sunt fabricate din compozite din plastic.
Dimensiunea elicei pe care o puteți folosi este limitată de dimensiunea cadrului dvs., precum și de puterea HF a motorului dvs. De regulă, cu cât ești mai folosită elice pentru a crea o anumită forță, cu atât va fi mai eficient. Pentru mini-quadrocoptere, acestea variază între șuruburile de 5-6 inci în trepte de 4-5 inci.
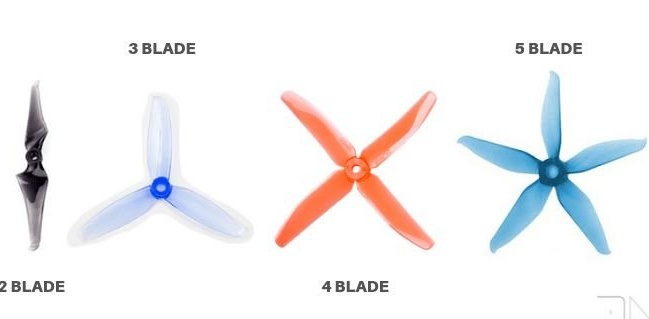
Numărul de lame afectează tracțiunea și consumul de energie. Cu cât mai multe lame, cu atât este mai mare tracțiune și cu atât mai multă energie este irosită.

Acumulator.
În prezent, majoritatea drone folosesc baterii cu polimer de litiu, cunoscute în mod obișnuit ca baterii Lipo. Bateria, împreună cu ESC și motorul este un sistem de alimentare cu patru canale.
Nu vă gândiți la baterie ca la un rezervor de energie, motoarele pot trage o cantitate monstruoasă de ampere la intervale foarte scurte. Bateriile LiPo sunt un set de celule, fiecare având o tensiune nominală de 3,7 V. Dacă este necesară o tensiune mai mare, aceste celule pot fi conectate în serie pentru a forma o singură baterie. Bateriile conectate în serie sunt marcate cu litera „S” și în paralel cu litera „P”.
Cu cât sunt mai multe celule conectate în serie, cu cât tensiunea este mai mare și mai multe celule în paralel, cu atât capacitatea este mai mare.
De exemplu:
1S = 1 celulă = 3,7 V
2S = 2 celule = 7,4 V
3S = 3 celule = 11,1 V
4S = 4 celule = 14,8 V
5S = 5 celule = 18,5 V
6S = 6 celule = 22,2 V
Capacitatea este indicată în miliampere sau „mAh”. Acesta este numărul de amperi pe care le poate livra o baterie într-o oră. De exemplu, o baterie 3S 2000 mAh poate furniza 2 A timp de 1 oră. Deci, dacă quadcopterul dvs. trage 20A, atunci zborul său va continua timp de 2/20 * 60min = 6 minute.
Descărcarea nominală indică viteza maximă cu care puteți trage curent din baterie. Este indicat de numărul „C” deasupra. Cu cât gradul C este mai mare, cu atât cantitatea de curent poate fi mai mare.
De exemplu, o baterie de 2000 mAh 25C poate livra până la 2000x25 = 50.000 mA sau 50 A.



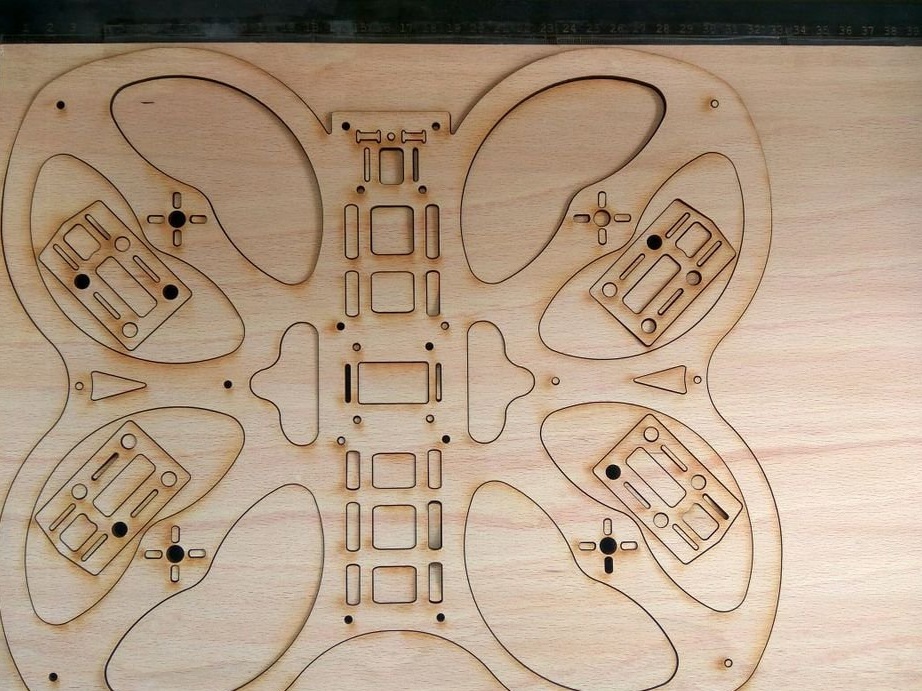
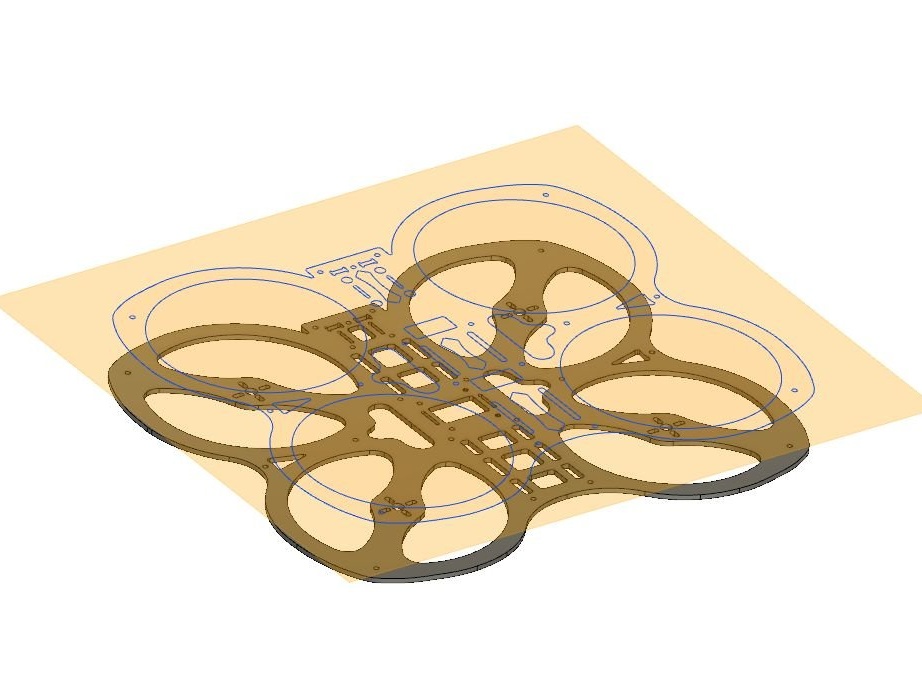
Pasul doi: proiectarea și asamblarea cadrului
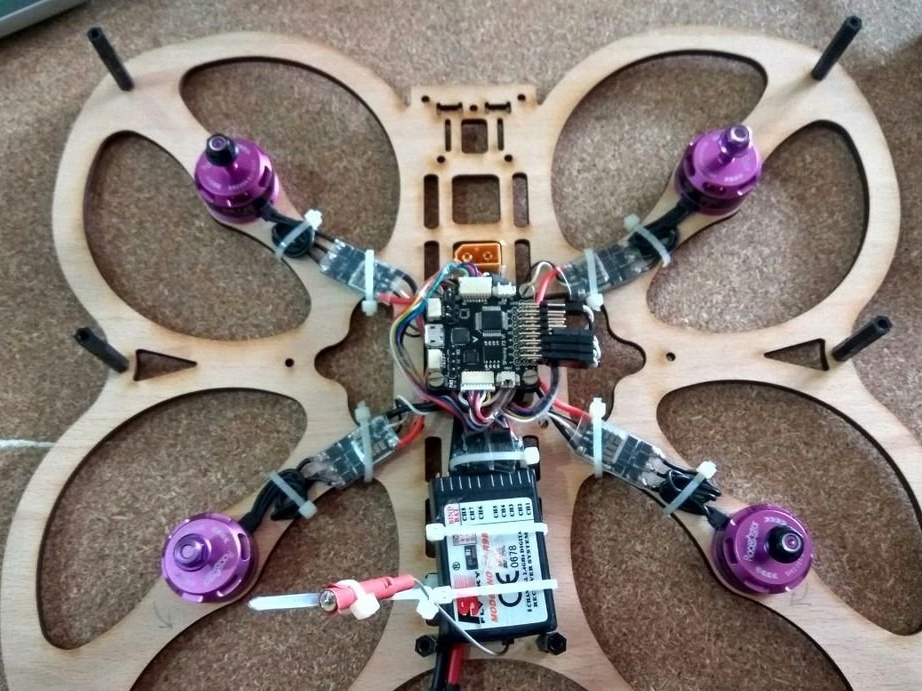
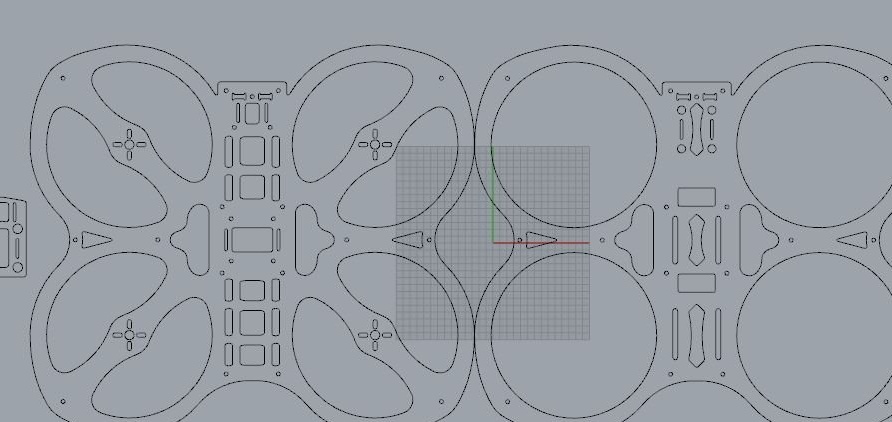
Designul ramei a fost inspirat de forma fluturelui monarh.Când privești cadrul de sus, pare două aripi.
Vrăjitorul a desenat designul în Fusion 360 și Rhino CAD. Dimensiunea cadrului este de aproximativ 230 mm, se datorează distanței diagonale de la un butuc motor la altul. Cele mai populare dimensiuni ale cadrului sunt de 210 mm, 250 mm, etc. După ce ați setat dimensiunea cadrului, trageți suporturile motorului.
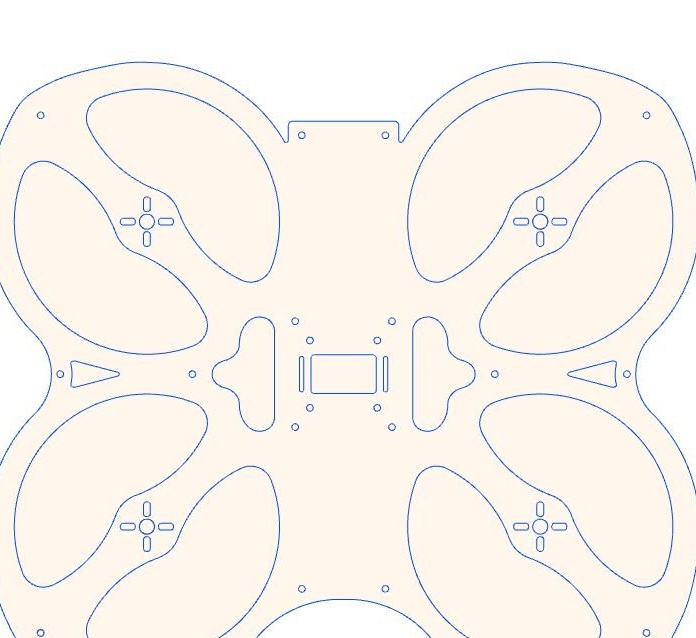
Clădirea centrală este locul în care vor fi instalate toate echipamentele electronice, inclusiv controlerul de zbor, receptorul, bateria, etc. În punctul mijlociu există 4 găuri M3 la o distanță de 30,5 mm unele de altele.
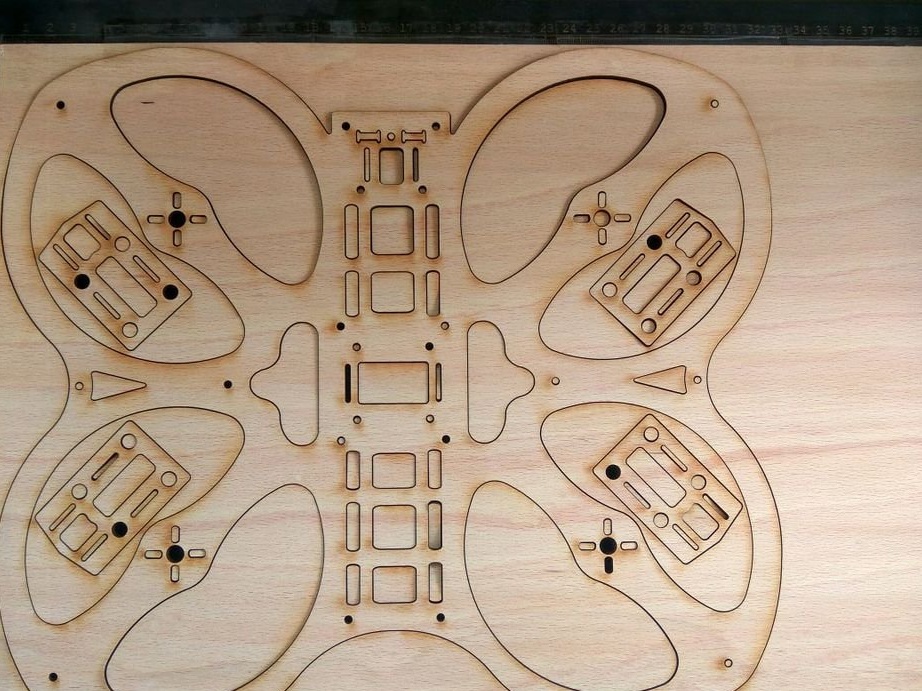
Produsul este realizat folosind tăiere cu laser. Dacă nu aveți un tăietor, puteți să îl tăiați în atelier. Fișierul pentru tăiere poate fi descărcat mai jos.
Proiectare fișier.rar









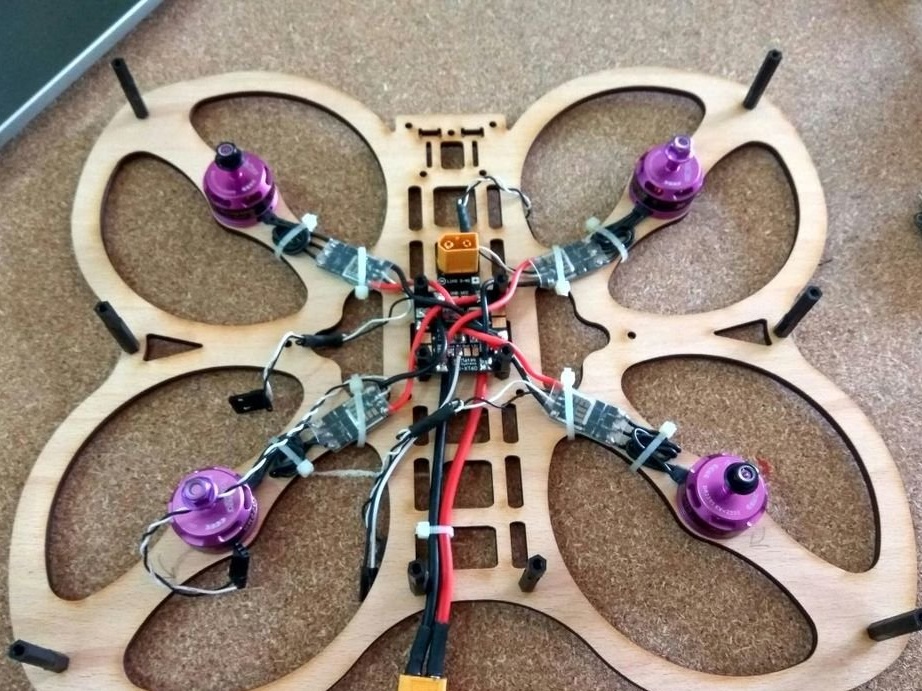
Pasul trei: Construiți
Acum trebuie să asamblați un quadrocopter.
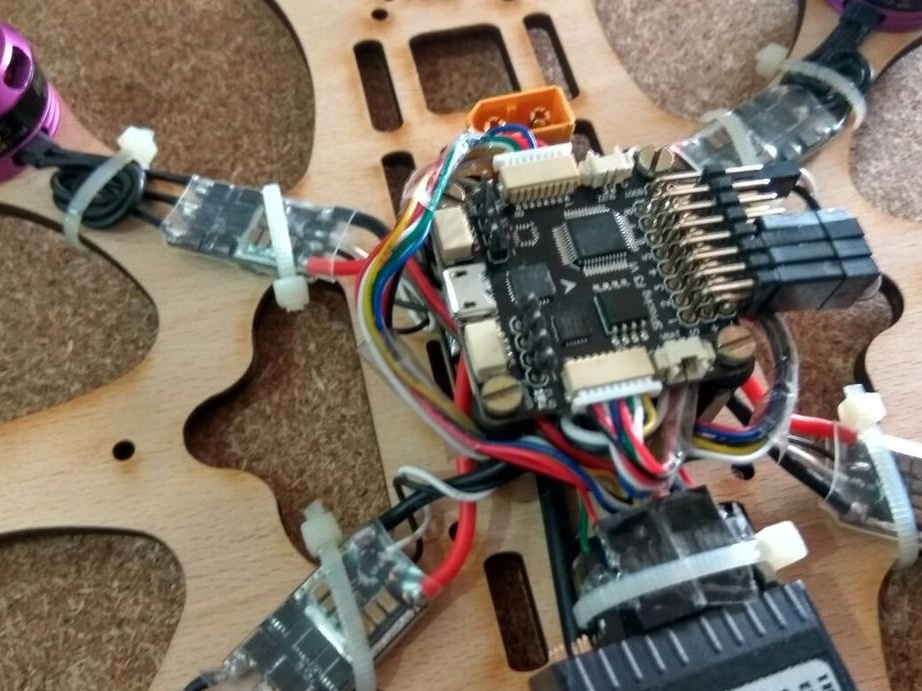
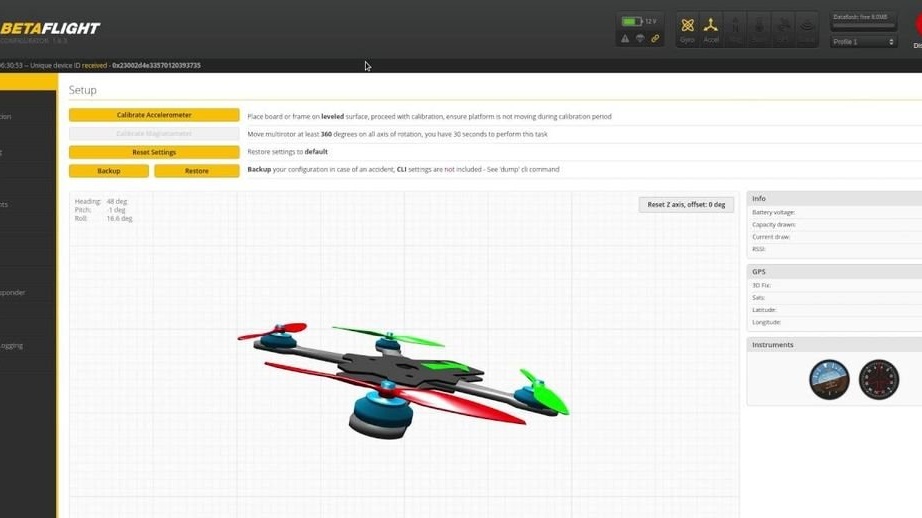
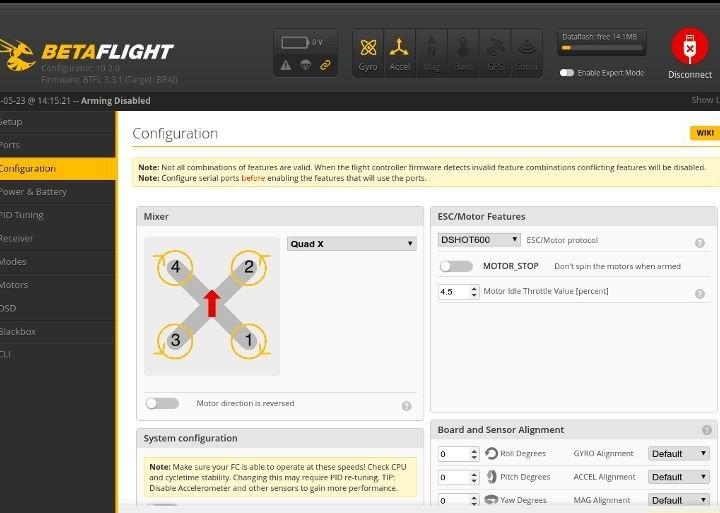
În primul rând, trebuie să blițează controlerul cu firmware Betaflight. Apoi calibrați senzorul. Conectați modulul radio și verificați funcționarea acestuia. Montați motoarele pe cadru conform diagramei cadrului X cu direcția de rotație corectă. Se lipeste motorul duce la bornele ESC și se fixează ESC pe suport. Atașați placa de distribuție a energiei și vindeți plăcuțele ESC. Conectați Soler XT60 la cablul de alimentare, apoi la placa de distribuție a energiei electrice. Fixează controlerul. Conectați firele din ESC la regulatorul de zbor. Se montează receptorul pe cadru. Puneți capacul superior.