

Articolul va avea în vedere un exemplu de creare a unui robot legendar numit "Canbot". Cea mai mare parte a detaliilor pentru robot este imprimată pe o imprimantă 3D. Robotul este controlat de la distanță.
Materiale și instrumente pentru de casă:
- Un microcontroller Atmel Attiny85;
- două microservicii HXT900 sau analogii acestora;
- o baterie LiPo de 3,7 V;
- un receptor infraroșu la 38 kHz;
- traductor ultrasonic tip HC-SR04;
- Comutator sau jumper de 9x4mm în schimb;
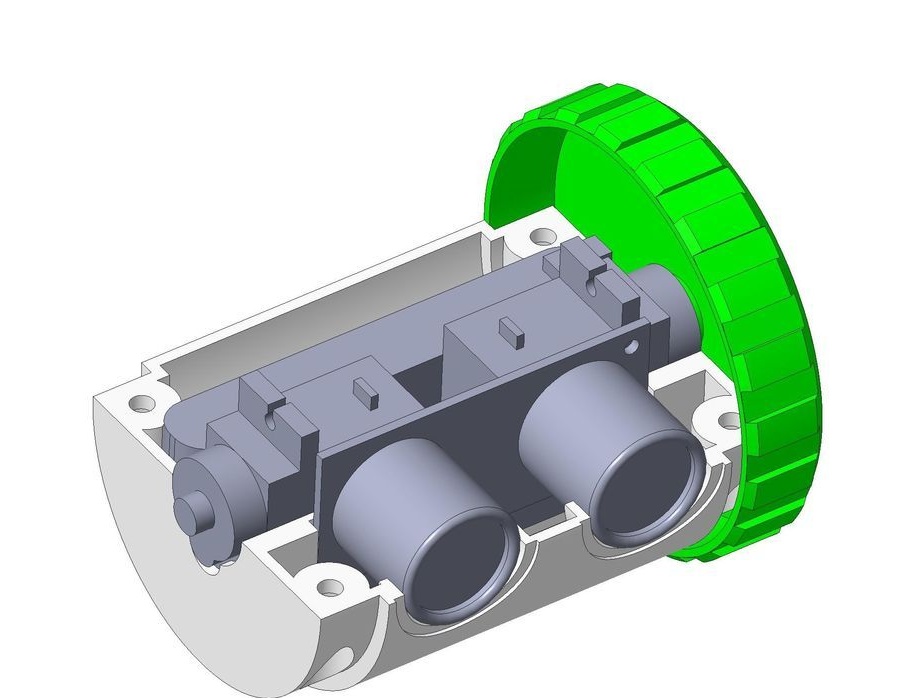
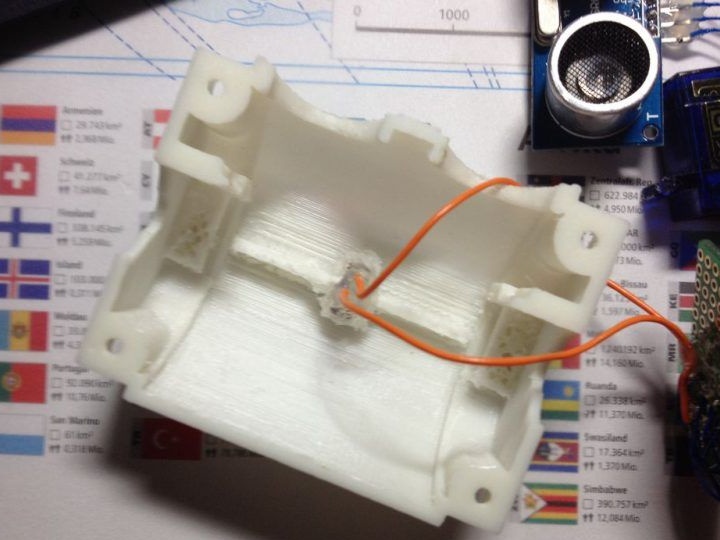
- Piese 3D (posibile). Va fi nevoie de o parte superioară (top.stl), una inferioară (bottom.stl) și două roți (wheel.stl).
Desigur, instrumente de lipit, lipici fierbinte, șurubelnițe, șuruburi, fire și alte lucruri mici vor fi necesare.

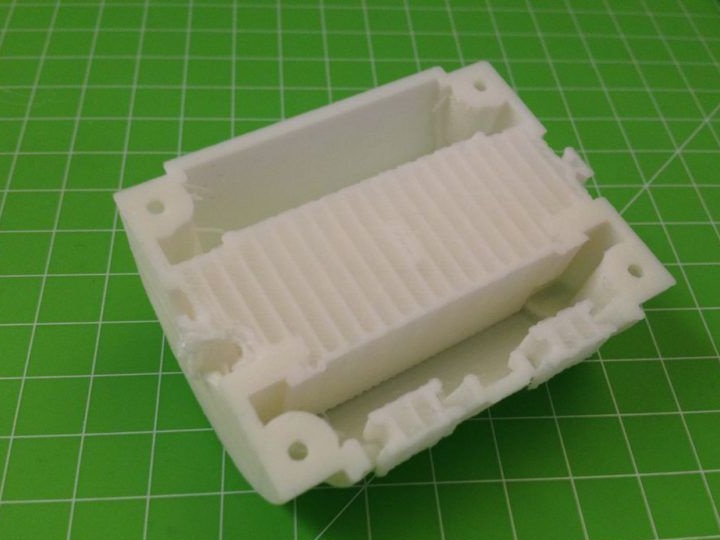
Părțile superioare și inferioare vor trebui să fie tipărite în jos cu opțiunea „structuri de asistență”. În funcție de tipul de imprimantă folosit, este posibil ca părțile finite să fie curățate la final.
Procesul de fabricație al robotului:
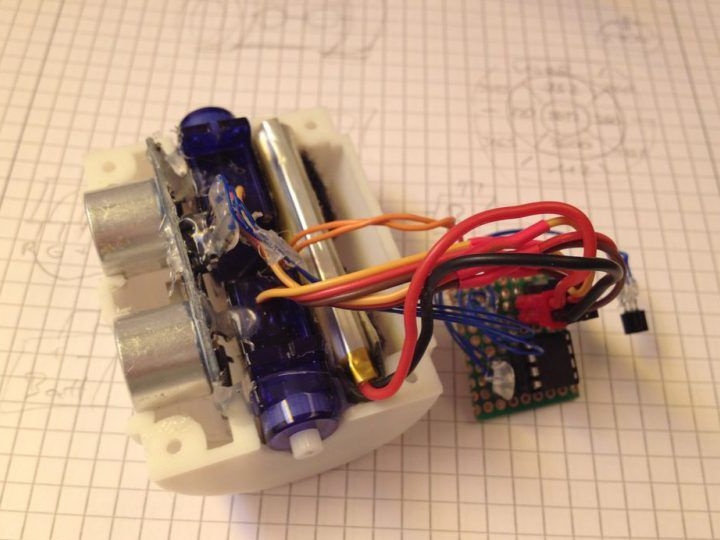
Primul pas. electronic o parte a robotului
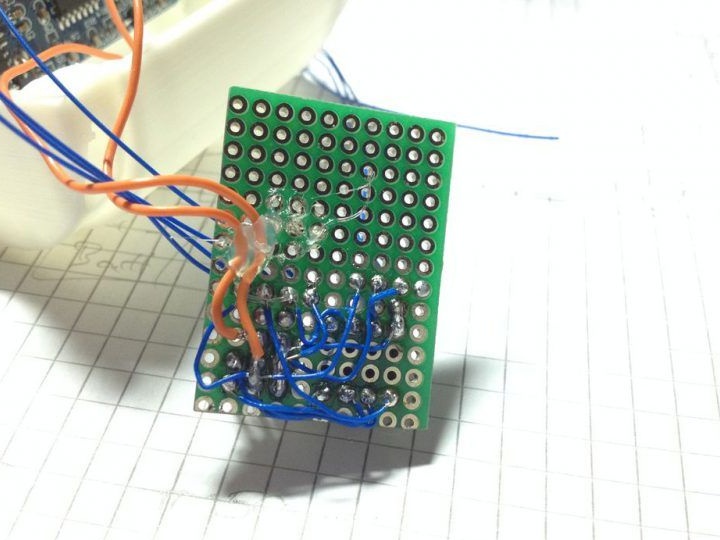
Mai întâi trebuie să configurați servos-urile, acestea trebuie convertite în rotație continuă. Cum se face acest lucru, există o mulțime de instrucțiuni pe Internet. Ei bine, atunci toate elementele electronice vor trebui asamblate așa cum este indicat în diagramă. Pentru a asambla partea electronică a fost convenabil, puteți lua o bucată mică dintr-o pană, precum și fire subțiri.


Pasul doi Partea software a robotului
Dacă abordați procesul de creare a unui robot cu cel mai înalt profesionalism, atunci partea software poate fi scrisă independent. Dar pentru asta va trebui să înveți un limbaj de programare. Într-o versiune mai simplă, puteți descărca cod gata pregătit și pur și simplu încărcați-l pe microcontroler.
Potrivit autorului, cel mai bun robotul primește semnale infraroșii de la telecomenzile mărcii Sony. În viitor, va fi necesar să „reflash” partea de cod Arduino și scoateți datele prin funcția Serial.print (). Drept urmare, va fi posibil să aflați ce codificare este pe fiecare buton.
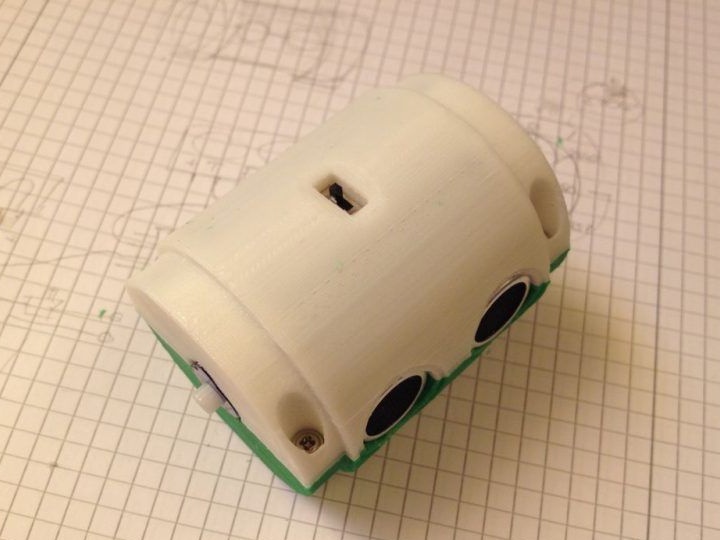
Pasul trei Etapa finală. Asamblați robotul
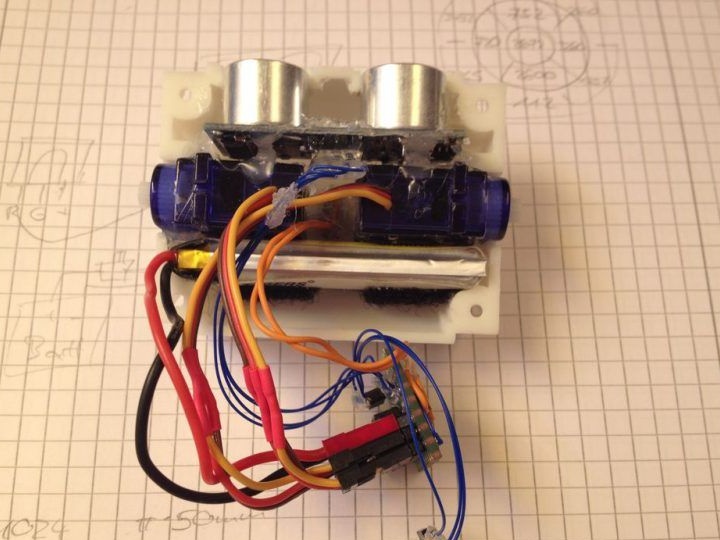
În concluzie, robotul merge. În aceste scopuri, veți avea nevoie de lipici fierbinte. Cu acesta, trebuie să fixați firele, astfel încât acestea să nu se desprindă atunci când robotul se mișcă.Este, de asemenea, necesar să fixați comutatorul și să fixați bine senzorul cu ultrasunete. În concluzie, capacele robotului sunt conectate cu patru șuruburi, astfel încât, dacă este necesar, acesta poate fi demontat cu ușurință. Apropo, șuruburile pentru servos sunt perfecte pentru montare.

Asta e tot, acum robotul este aproape gata. Rămâne să instalați roțile pe arborii servomotori și puteți începe să testați robotul. Puteți vedea mai detaliat cum funcționează casele la videoclip.