


Am luat parte din proiectarea mea din instrucțiunile de montaj pentru Lego Technic 42049 și Lego Technic 42041. Restul este improvizația mea. Pentru control, voi folosi modulul Bluetooth asociat dispozitivului sau computerului Android. Deci avem nevoie de:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- Conductor motor L9110S
- 1 servomotor SG-90
- Modul Bluetooth HC-05 sau echivalent
- USB-UART pentru firmware arduino
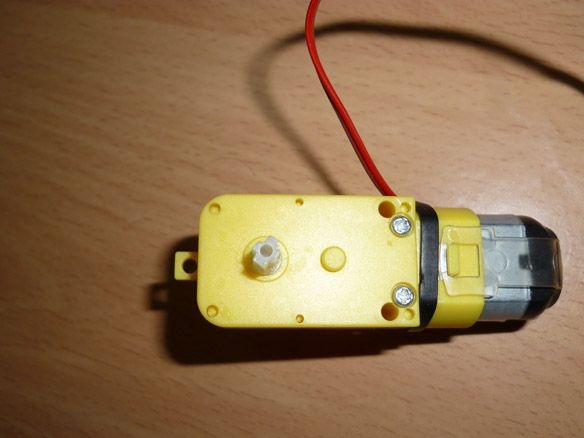
- Cutie de viteze motor 6v 1: 150 100 rot / min
- 2 LED-uri
- 2 rezistențe de 150 ohmi
- condensator 10v 1000uF
- 2 pieptene cu un singur rând PLS-40
- Inductor 68mkGn
- 6 baterii NI-Mn 1.2v 1000mA
- Conector tată-mamă cu doi pini la cablu
- Homutik
- Firuri de diferite culori
- lipire
- Rosin
- fier de lipit
- Bolțuri 3x20, piulițe și șaiburi pentru ele
- Șuruburi 3x40
- Bolțuri 3x60
Pasul 1 Ansamblul punții spate
Deplasarea înainte - înapoi va fi efectuată de un motor cu un motor de 6 V, un raport de viteză de 1: 150 și o viteză de ralanti de 100 rpm. Puteți încerca un alt raport de viteză, dar, în opinia mea, acesta este optim. Axa cutiei de viteze de pe ambele părți trebuie să fie incizată în formă de cruce și pusă pe detalii lego:
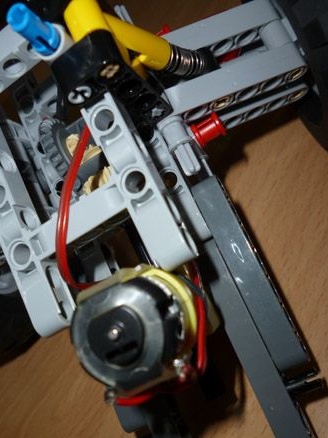
În continuare, colectăm baza punții spate conform instrucțiunilor Lego 42029 partea 1, începând de la 3 pagini până la 8 inclusiv. Și adăugați câteva detalii, astfel încât să puteți instala motorul și cutia de viteze.
Vizualizați fișierul online:
Vizualizați fișierul online:



Pasul 2 Asamblarea punții din față
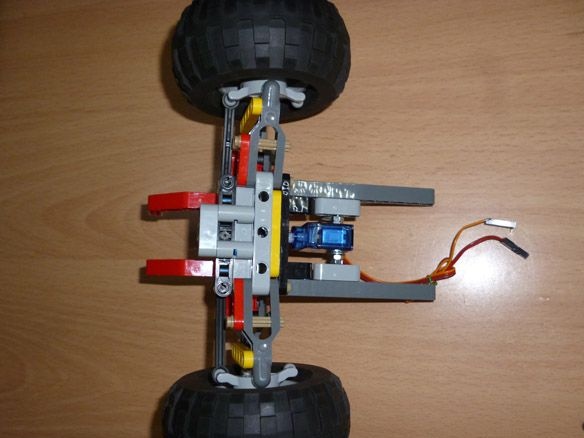
Asamblăm partea din față a suspensiei conform instrucțiunilor Lego 42029 partea 1, de la pagina 21 la 23. Luăm trapezul din partea a doua a Lego de la pagina 6 la 11. Servo SG-90 este potrivit pentru rotirea roților. Pentru a-l fixa pe modelul nostru, este necesar să găuriți cu atenție, pentru a nu atinge părțile interne ale servo, o gaură de trecere cu diametrul de 3,2 mm sau doar să o tăiați cu un cuțit de papetărie. De asemenea, tăiați părțile proeminente („aripi” pentru fixare). Introducem un șurub în gaura făcută și o fixăm cu piulițe. Pe axul servo am pus o pârghie cu o parte înșurubată din lego:





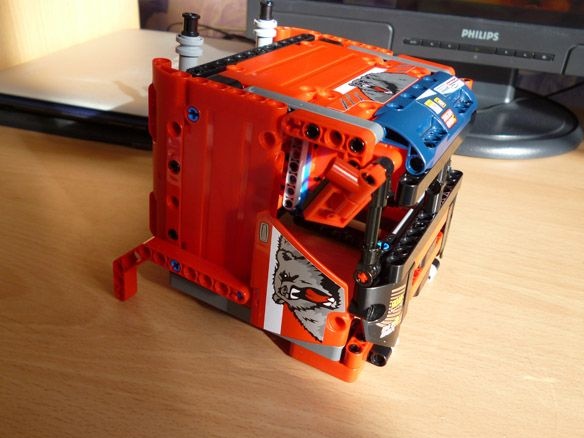
Pasul 3 Asamblarea bazei și a cabinei
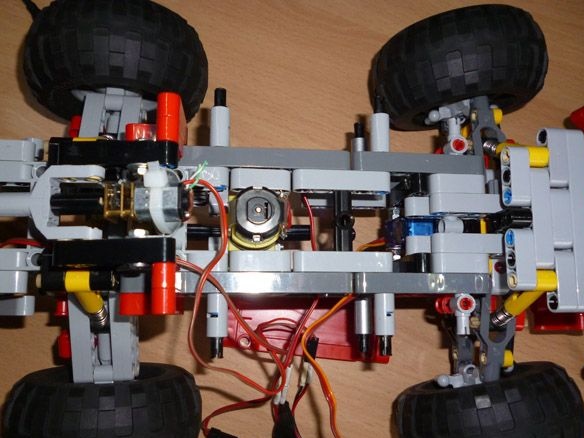
Conectăm ambele poduri așa cum se arată în fotografie:
Asamblăm cabina conform instrucțiunilor Lego 42041. Pornind de la paginile 39 la 47 din prima parte. Mai departe de la pagina 5 la 28 din partea a doua. La fel și bara de protecție de la paginile 38-43 din partea a doua a instrucțiunilor.
Vizualizați fișierul online:
Vizualizați fișierul online:


Vizualizați fișierul online:
Vizualizați fișierul online:
Pasul 4 Electrice
Pentru control, vom folosi Arduino Pro Mini și modulul Bluetooth. Pro Mini poate fi înlocuit cu orice altă placă Arduino. Am ales Pro Mini, deci este cel mai mic. Șoferul motorului este necesar pentru conectarea motorului.
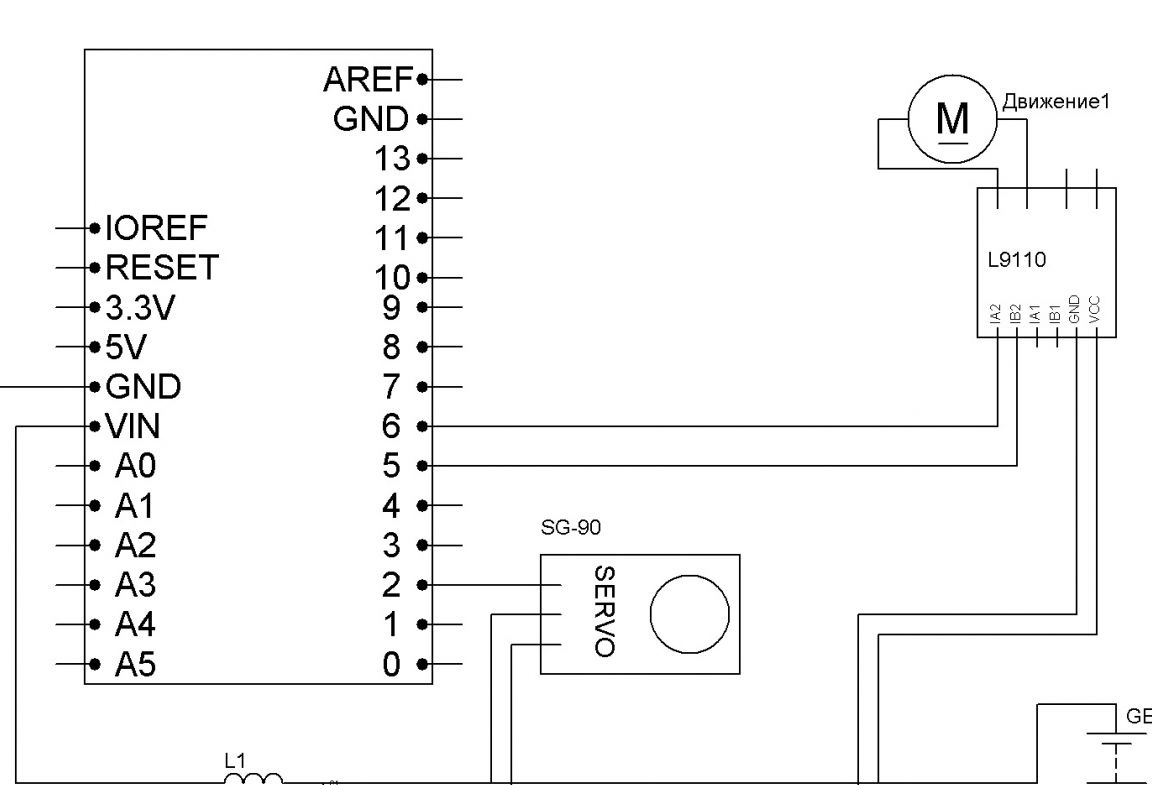
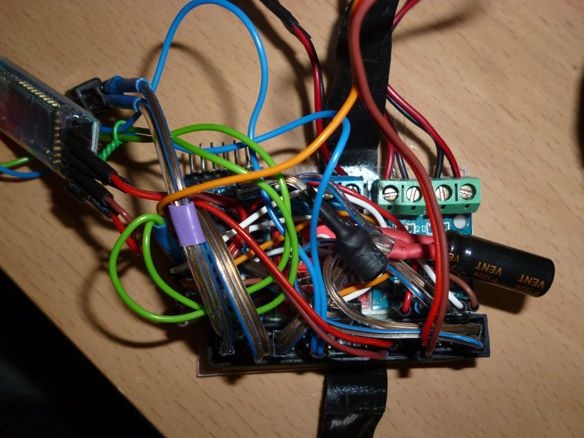
Conexiunea tuturor componentelor cu firele Dupont de la mamă la mamă. Putere - 6 baterii NI-Mn 1.2v 1000mA conectate în serie. Un condensator de orice putere mică, un inductor, de asemenea, veți găsi, trebuie să stabilizați puterea microcontrolerului. Anodii celor două LED-uri sunt conectate la arduino cu 4 pini, catodii la GND. Rezistorile sunt selectate pentru ledurile utilizate. Pentru confort, bobinați bateriile cu bandă.

Lipim totul pe o bandă cu două fețe pe baza:
Ne plasăm electricianul între roți și închidem:
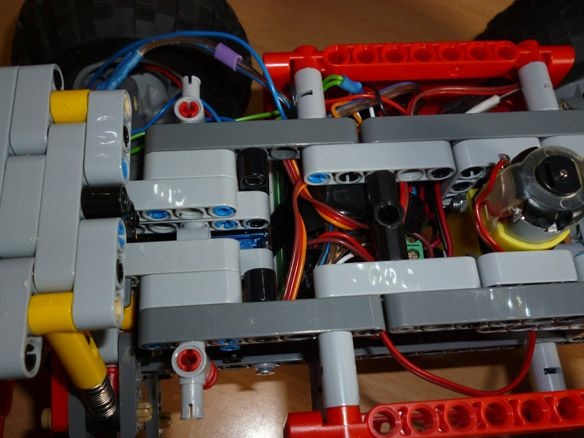
Adăugați câteva lovituri:


Pasul 5 Instalare Bluetooth
Cele mai accesibile module Bluetooth astăzi sunt HC-05 și HC-06. Sunt abundente în magazinele online chineze. Diferențele dintre ele sunt că primul poate funcționa atât în modul master (sclav), cât și în modul slave (master). Al doilea este un dispozitiv pur sclav. Cu alte cuvinte, HC-06 nu poate detecta un dispozitiv împerecheat și poate stabili o conexiune cu acesta, el poate asculta doar de master.
Scurtele caracteristici ale modulelor:
- cip Bluetooth - BC417143 fabricat de
- protocol de comunicare - Specificația Bluetooth v2.0 + EDR;
- raza de acțiune - până la 10 metri (nivel de putere 2);
- Compatibil cu toate adaptoarele Bluetooth care acceptă SPP;
- cantitatea de memorie flash (pentru stocarea firmware-ului și setărilor) - 8 Mbit;
- frecvența semnalului radio - 2,40 .. 2,48 GHz;
- interfață gazdă - USB 1.1 / 2.0 sau UART;
- consum de energie - curentul în timpul comunicării este de 30-40 mA. Valoarea curentă medie este de aproximativ 25 mA. După stabilirea conexiunii, consumul curent este de 8 mA. Nu există modul de somn.
De obicei, modulele sunt vândute sub formă de două plăci lipite. Cel mai mic este un modul din fabrică, utilizat pe scară largă în diverse electronic dispozitive. Mare - o panou special pentru bricolaj.
Așa arată modulele HY-05 și HC-06 DIY:
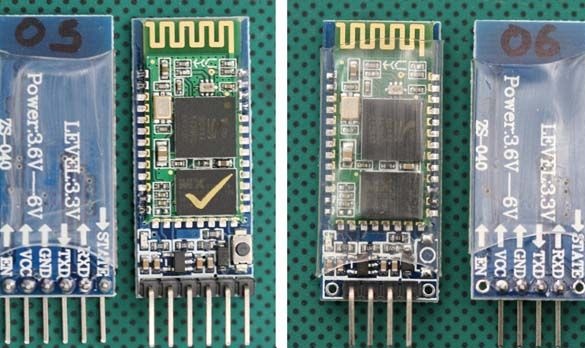
În principiu, puteți utiliza orice modul doriți. Un modul fără o placă de pană costă mai puțin, dar va trebui să aveți grijă de sursa de alimentare de 3,3 V pentru modul și să vă chinuiți prin lipirea firelor către modul. Am ales optimul, după părerea mea, în raportul preț / funcțional HC-06.
Ne conectăm după cum urmează:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Pentru o funcționare corectă, modulul trebuie configurat. Vom configura comenzile AT introduse în fereastra terminalului. Dau un exemplu de configurare a modulului HC-05. Dacă aveți o setare diferită, poate fi diferit. Pentru ca modulul nostru să primească comenzi, mai întâi blițăm Arduino cu următorul firmware:
În acest caz, Arduino acționează ca o punte de legătură între computere și modul. În firmware, folosesc biblioteca SoftwareSerial. La viteze mari, funcționează instabil. Dacă doriți o viteză mare, puteți conecta modulul direct la contactele Arduino RX și TX și rescrie firmware-ul. Dar în cazul meu, vom lucra cu modulul cu o viteză de 9600. Deci, după firmware, deschideți terminalul și introduceți:
„AT” (fără ghilimele) trebuie să vină răspunsul „OK” (înseamnă că totul este conectat corect și modulul funcționează)
„AT + BAUD96000” (fără ghilimele) ar trebui să vină răspunsul „OK9600”.
Dacă aveți răspunsul corect, treceți la pasul următor.
Pasul 7 Firmware
Pentru a scrie firmware-ul și firmware-ul în sine, folosesc IDE-ul Arduino. Versiunea actuală pentru astăzi este 1.8. De fapt firmware:
Pasul 8 Configurează-ți telefonul.
Pe un telefon Android, trebuie să instalați un program pentru a controla robotul prin Bluetooth. Sunt foarte mulți. Puteți introduce „Bluetooth Arduino” în Google play și alege după gustul dvs. Mi-a plăcut controlerul BT. Descărcați și instalați pe telefonul sau tableta dvs. Android. În continuare, prin setările Android, trebuie să stabiliți o conexiune cu modulul nostru. Parola pentru conexiune este „1234” sau „0000”. Apoi, configurați programul pentru comenzile corespunzătoare. Lista este mai jos.
Pasul 9 Instalarea computerului (dacă este necesar)
Dacă este necesar, sau doar comoditate pentru control, puteți utiliza un computer sau un laptop. Pentru a face acest lucru, computerul trebuie să aibă Bluetooth. Stabilim comunicarea cu modulul nostru prin intermediul controalelor de pe computer. În continuare, avem nevoie de un terminal pentru a trimite comenzi. Orice convenabil pentru tine.După înregistrarea firmware-ului, controlul se efectuează prin următoarele butoane (comenzi):
W - înainte
S - înapoi
A - stânga
D - corect
F - oprire
G - volan
K - faruri
L - farul stins
Introducerea constantă a comenzilor este incomodă, așa că recomand să utilizați programul pentru a trimite comenzi. Folosesc Z-Controller. În program, selectați portul (port com prin care se realizează conexiunea) și configurați tastele pentru comenzi. Configurați-vă inactiv și intuitiv.
