


În acest articol, Vrăjitorul ne va arăta cum a făcut elicopterul Lego 60193 din Arctic Air Transport modelul quadrocopter. Sarcina principală în fabricarea quadrocopterului, pe lângă calitățile de zbor, a fost salvarea cât mai multor piese originale.
Să vedem un scurt videoclip care demonstrează funcționarea cvadrocopterului.
Deci, pentru fabricarea unui astfel de quadrocopter, maestrul a folosit următoarele
Instrumente și materiale:
-LEGO Helicopter City Arctic - 60193:
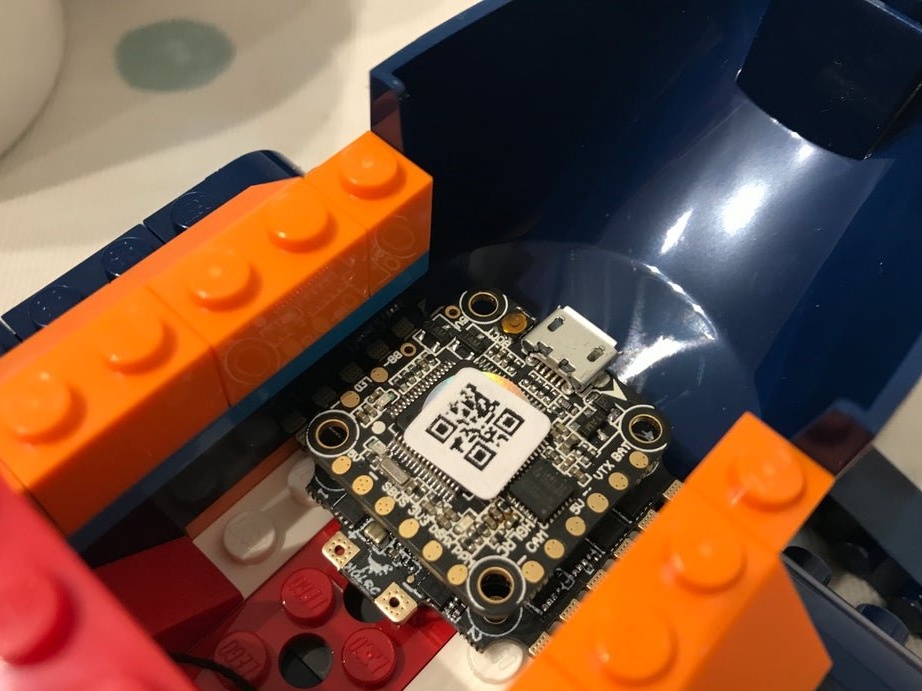
- Controler și ESC 20x20 mm, de exemplu, HGLRC XJB F428 Micro F4 AIO OSD;
- Motoare fara perii - 4 buc;
-Propellery;
-Baterie 950 mAh;
-Razemy;
seeing-;
-Modul radiu (emitator și receptor);
-Krepezh;
-Nozh;
-Fier de vânzare;
-Pistol de luciu;
- surubelnita;
-Drel;
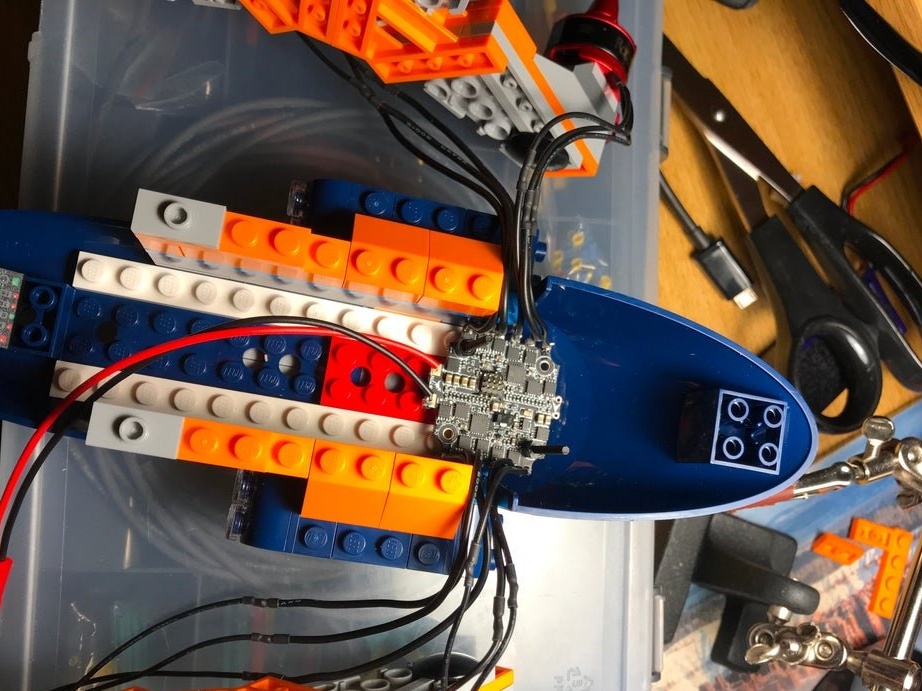
Pasul întâi: Lego Build
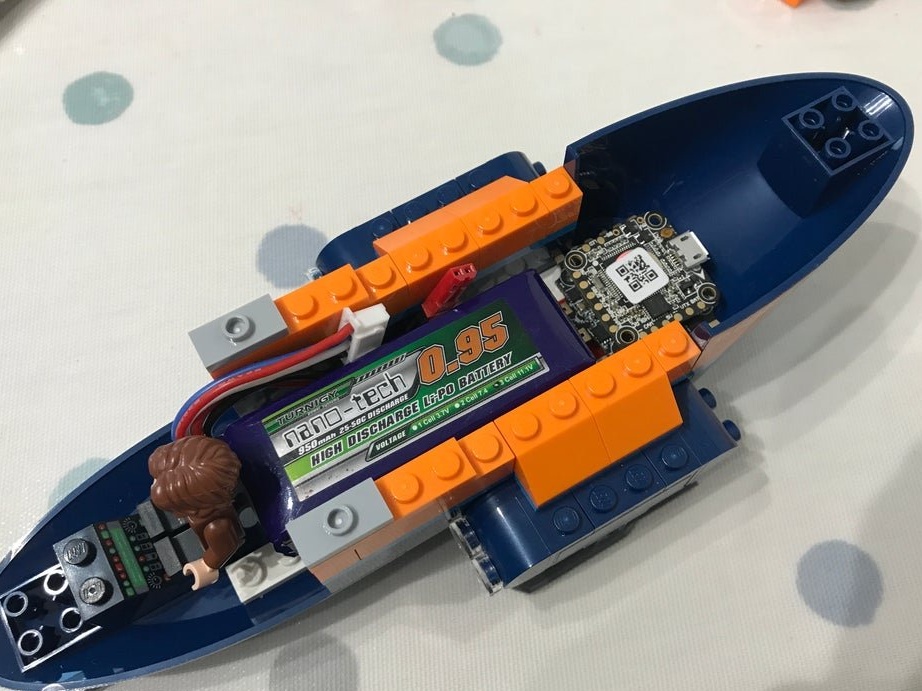
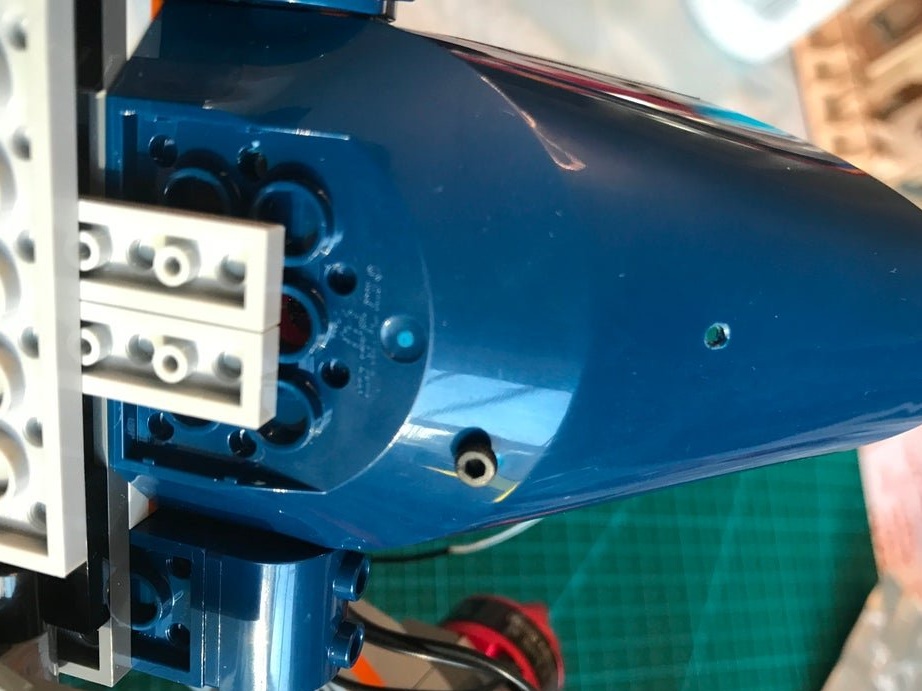
În primul rând, maestrul colectează LEGO-Arctic. Apoi, modelul este parțial demontat. În interior, trebuie să plasați bateria și regulatorul, respectând echilibrarea modelului.


Pasul doi: Montura motorului
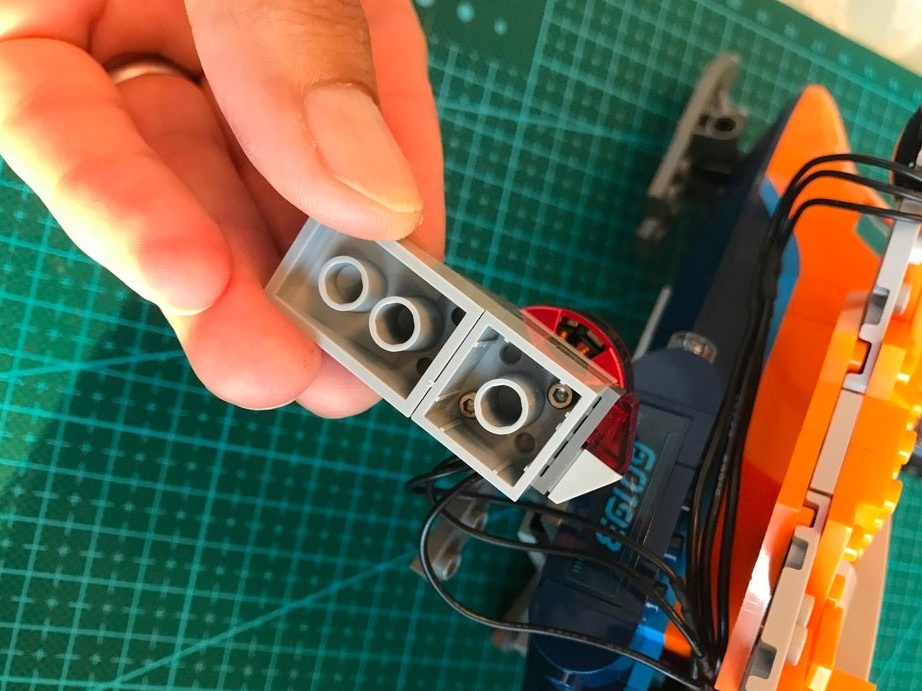
Găurile de fixare pentru motorul standard fără perie 1806 sunt la fel ca știfturile de pe placa standard LEGO 2x2. Fiecare monedă „motor” de pe un quadrocopter are o faianță de 2x2 gri închis (LEGO 3022) și o faianță gri 2x2 cu un știft vertical (LEGO 2460), care este de obicei ținută pe butucurile unei elice LEGO deasupra.
Stăpânul găuri găurile de montaj. La motoare, în centru, există un val redus. O gaură sub ea este găurită în centrul plăcii. Protejează motoarele.








Pasul trei: Umeri
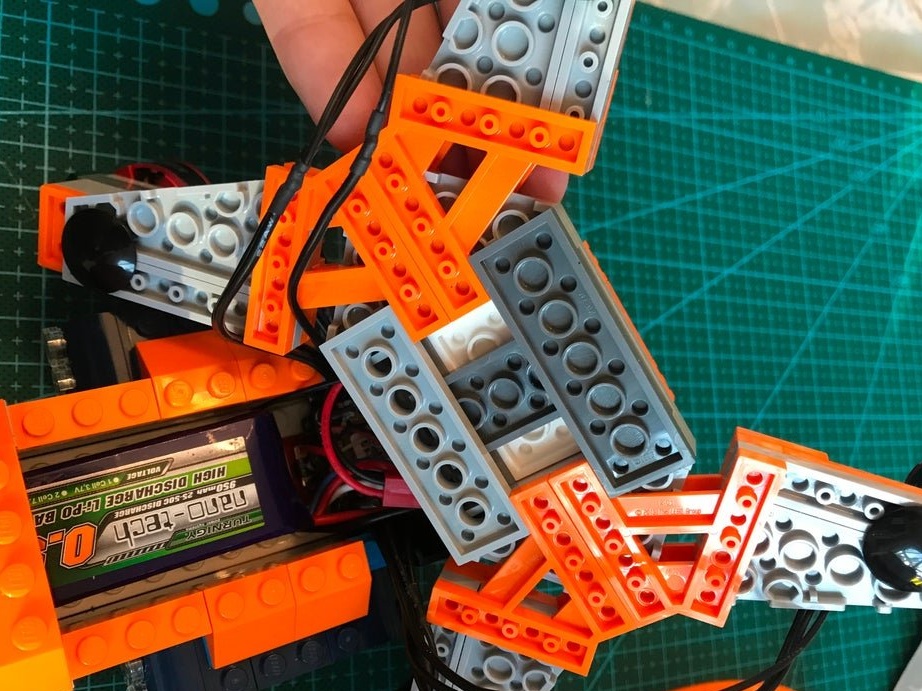
Reorganizând „umerii” patrulaterului, puteți schimba ușor aspectul pentru a oferi un aranjament mai larg sau mai restrâns al motoarelor și locația șuruburilor unul față de celălalt.
Ansamblul standard LEGO (prima fotografie) are „umerii” și motoarele amplasate lat (pe orizontală) cu o suprapunere destul de mare cu șurub. Maestrul reface „umerii” și aruncă motorul și, în consecință, șuruburile.



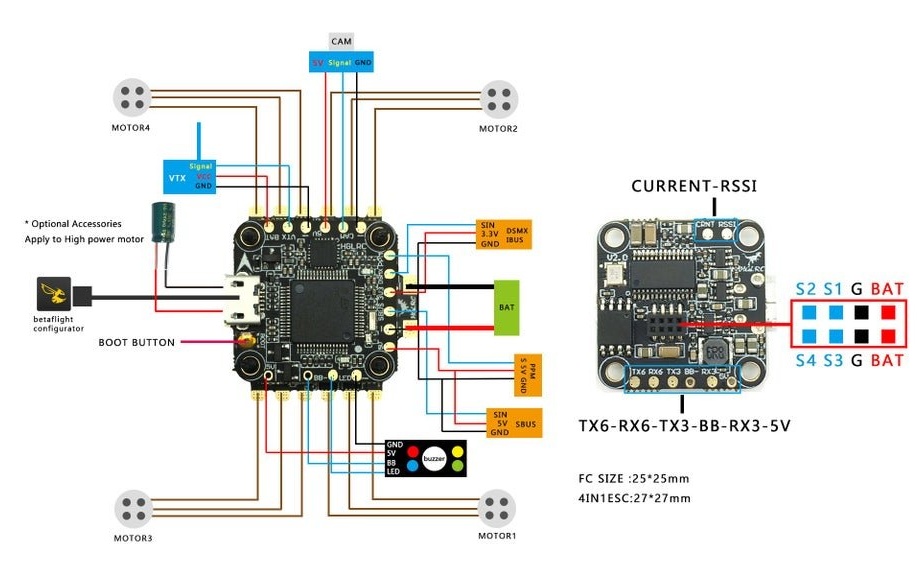
Pasul patru: electronică
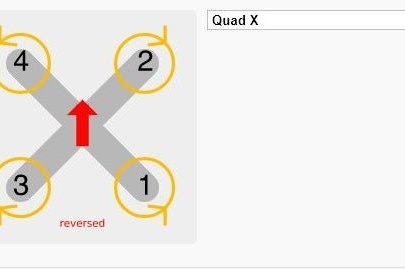
Conform schemei, instalează electronice. Prima fotografie prezintă o diagramă a direcției de rotație a motoarelor. Direcția de rotație poate fi modificată și în faza de programare.

După terminarea instalării și înainte de conectarea bateriei, expertul verifică conexiunile pentru a preveni ruperea sau scurtcircuitul.
Când porniți alimentarea, ar trebui să vedeți luminile de pe controlerul de zbor și câteva sunete de la ESC.
Pasul cinci: Configurare
Acum că totul este conectat, este timpul să configurați controlerul.Aceasta înseamnă descărcarea software-ului (software încorporat) care îndeplinește sarcina de decodificare a semnalelor de control de la emițătorul RC, procesarea semnalului de intrare a senzorului (accelerator, giroscope) și furnizarea de semnale de control pentru ESC pentru a roti motoarele cu o viteză dată.
Scoateți elicele pentru siguranță! Nu este necesară o baterie pentru primii câțiva pași de configurare, numai alimentarea USB.
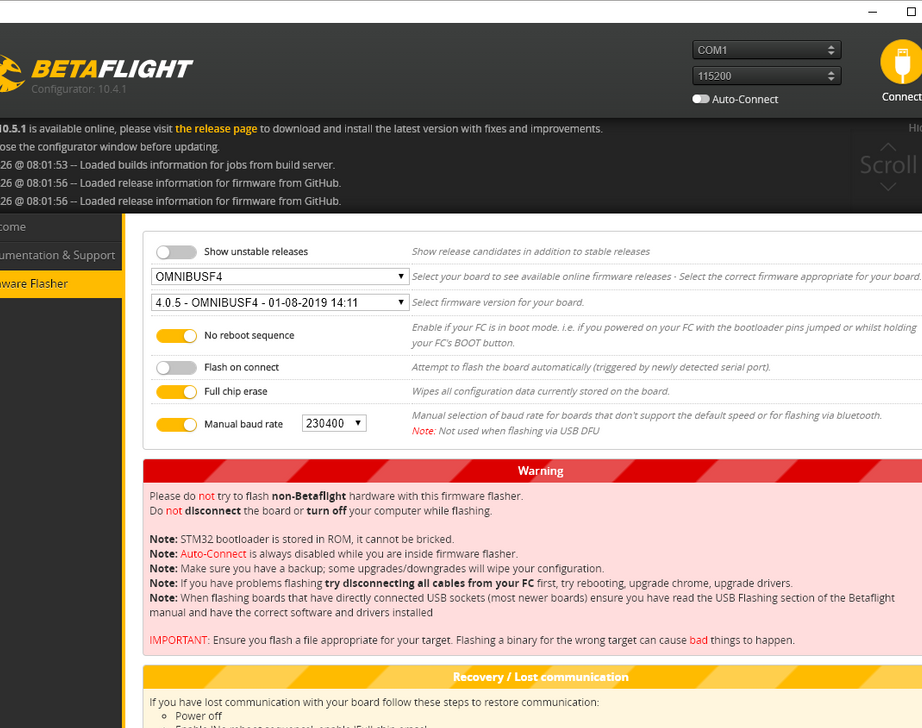
Descărcați Beta Configurator
Conectați cablul micro USB la regulatorul de zbor. Vă rugăm să rețineți că acest lucru poate fi mai ușor de făcut dacă controlerul nu este înșurubat pe șasiu.
Descărcați și încărcați firmware-ul corespunzător pentru controlerul de zbor.
betaflight-settings-legoquad.txt
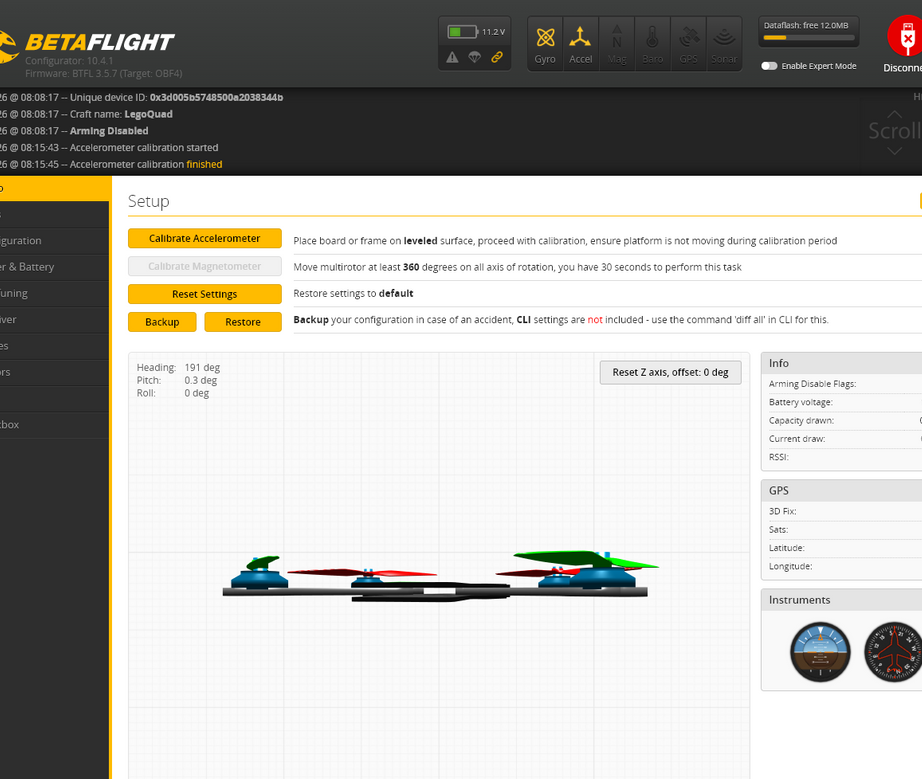
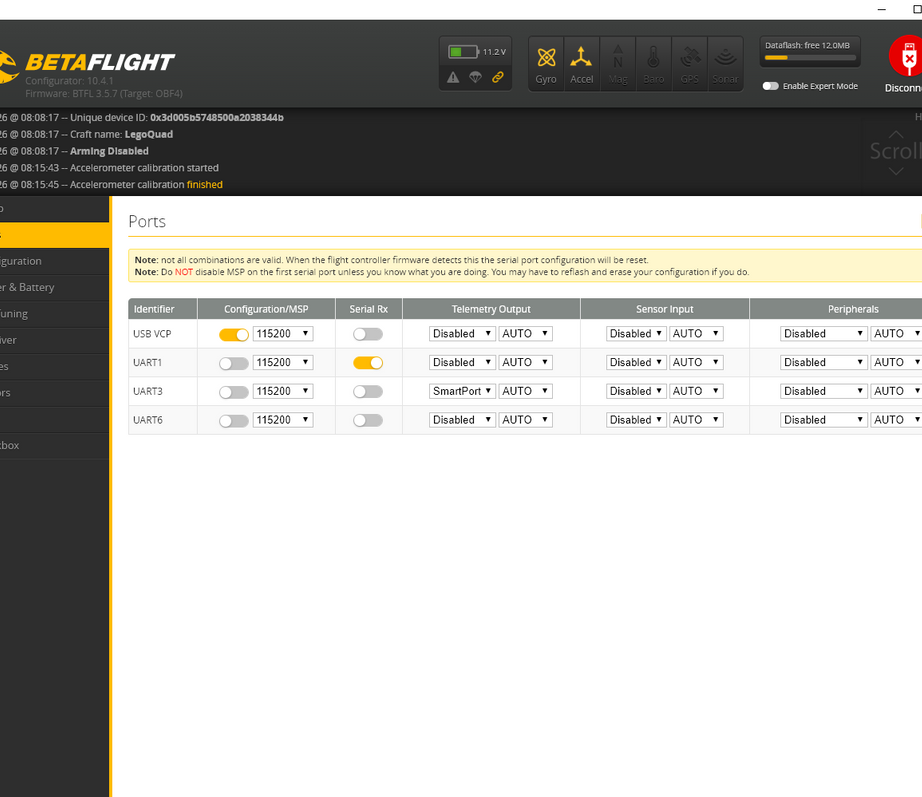
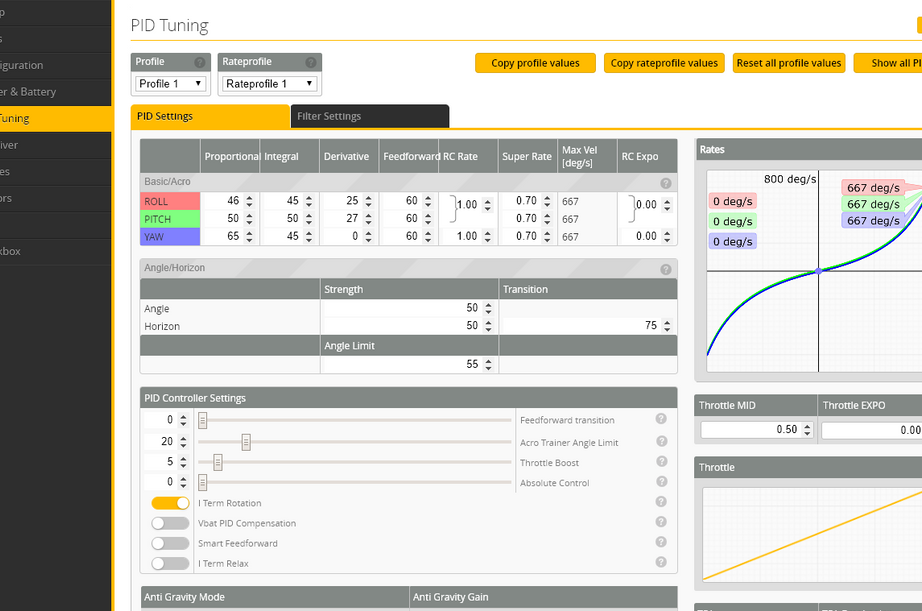
Faceți clic pe butonul „Conectați” și configurați următoarele setări:
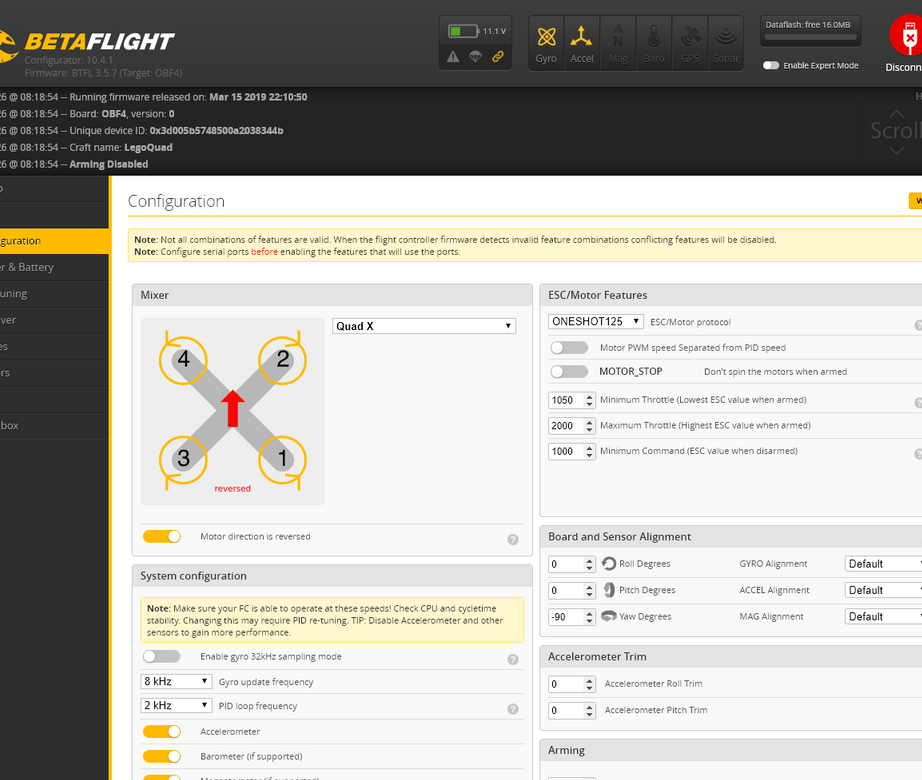
1. Configurare - calibrarea modelului motoarelor
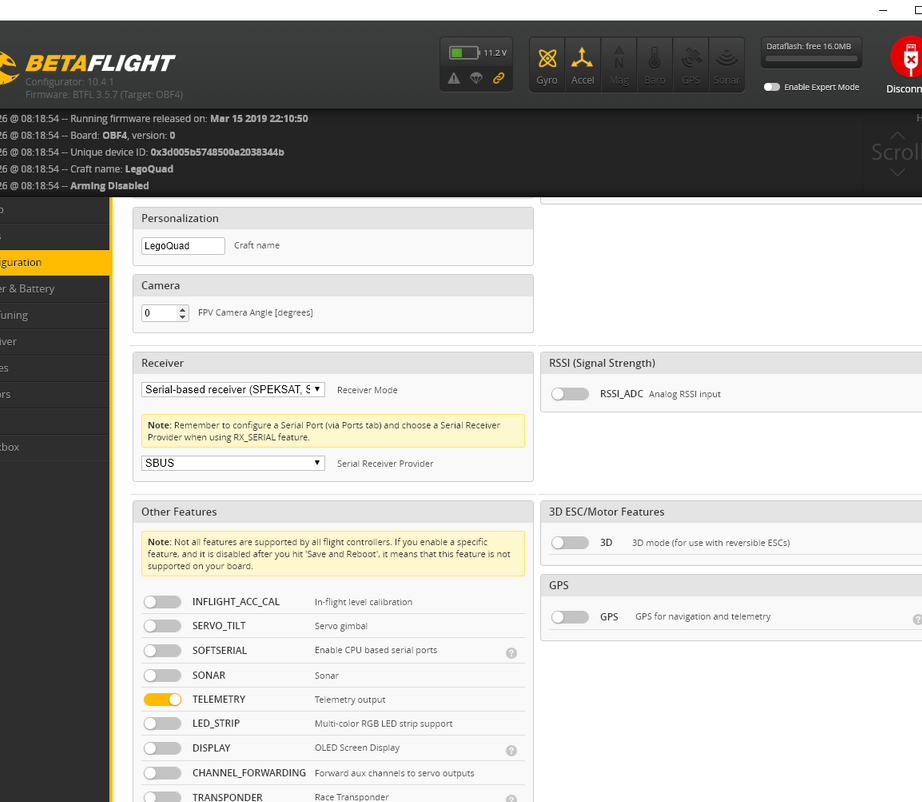
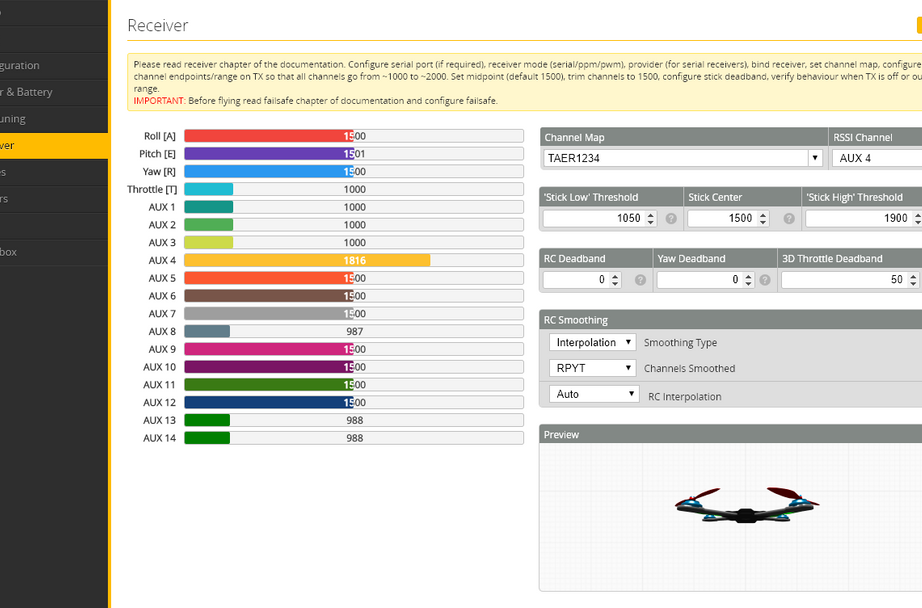
2. Specificați porturile - UART1 - Serial RX pentru conectarea receptorului SBUS RC
3. Salvarea și repornirea
4. Stabiliți o conexiune între receptor și emițător
5. Suprasarcină
6. Valoarea pentru masterul PID este setată la 250
7 Conectați bateria
8. Reglați tensiunea.
9. Asigurați-vă că afișarea canalului și direcția de control sunt corecte, atunci când totul este configurat, imaginea modelului cu patru crap în colțul din dreapta jos ar trebui să se deplaseze în toate direcțiile corecte atunci când deplasați butoanele de comandă pe controlerul RC.
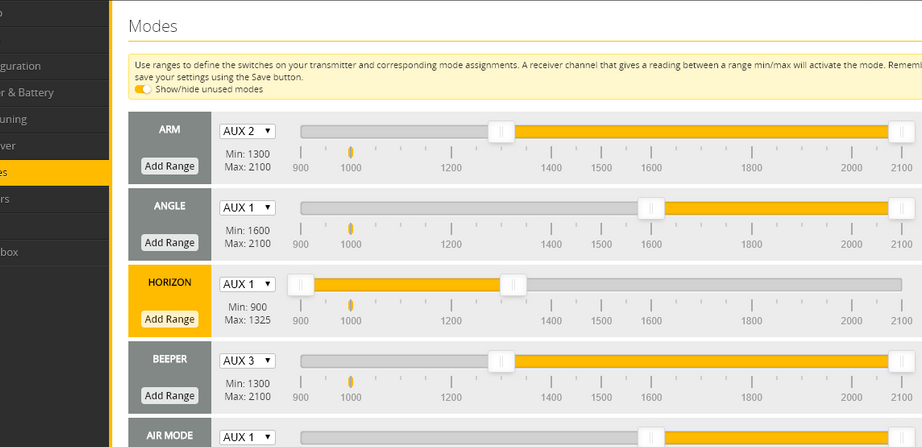
Configurează modurile.
ARM pornit / oprit
HORIZON auto-nivelant / ACRO pentru zborul tradițional FPV
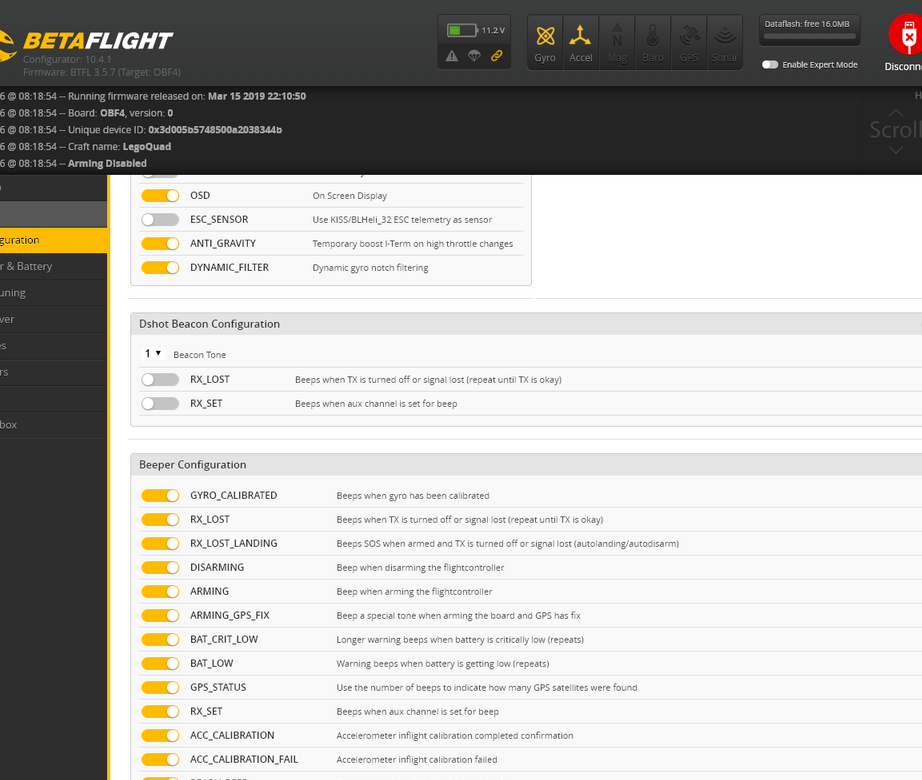
BEEPER - Util dacă pierdeți modelul în iarbă înaltă sau tufișuri.
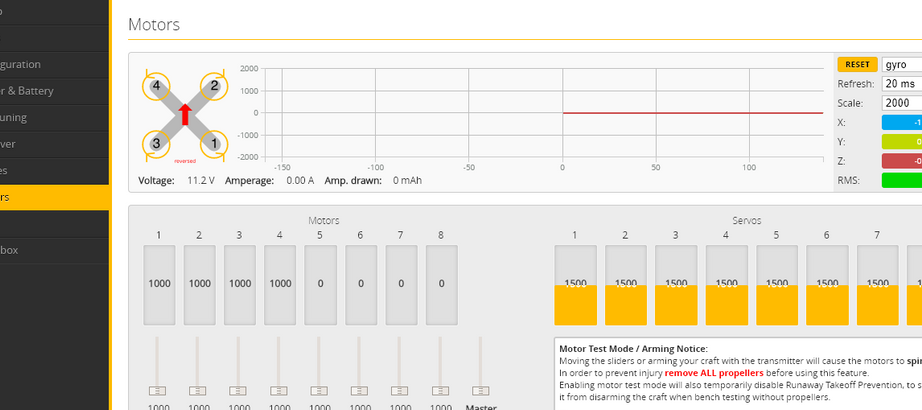
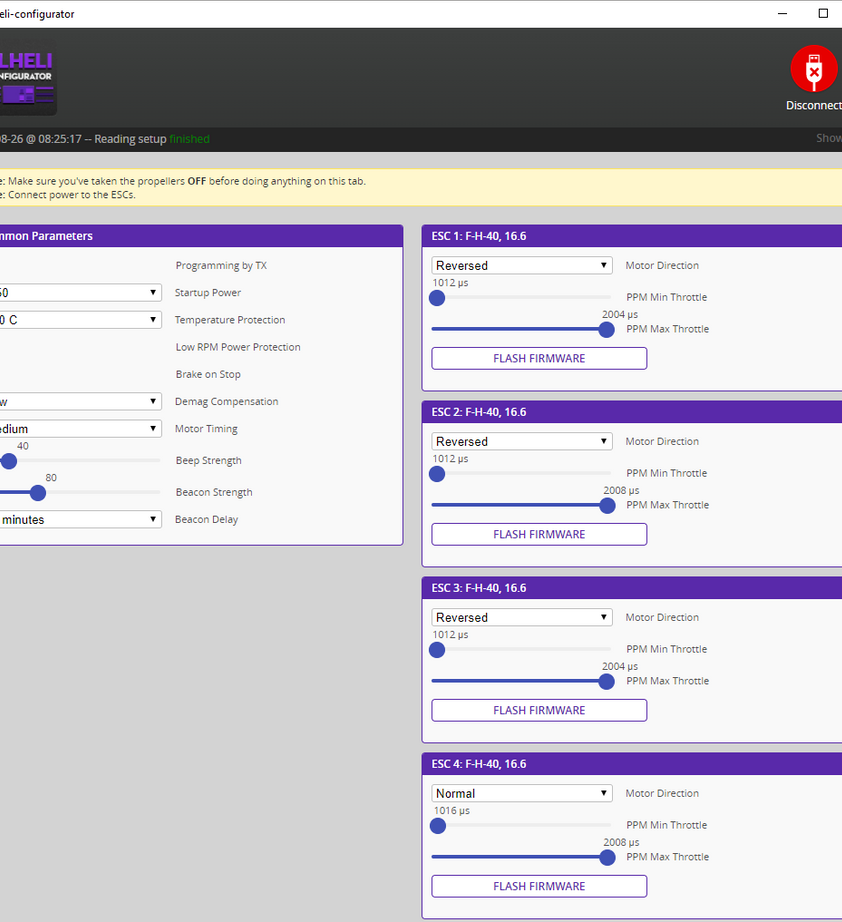
Fila „Motoare” - utilizați această opțiune pentru a verifica fiecare motor în parte și, mai important, pentru a marca direcția de rotație a fiecăruia dintre ele
Corecți orice direcție greșită de rotație cu ajutorul configuratorului BLHELI
După toți acești pași, puteți deconecta USB-ul și bateria, apoi porniți puterea și verificați dacă totul funcționează:
Porniți emițătorul și alimentați-l
Conectați bateria și montați quadrocopterul pe o suprafață plană
Porniți comutatorul ARM și motoarele ar trebui să înceapă să se rotească la viteză mică.
Verificați acceleratia în timp ce creșteți viteza
În modul orizontal, încercați să înclinați quadrocopterul și asigurați-vă că motoarele reacționează corespunzător, de exemplu, înclinați-l înainte și motoarele din față se vor accelera.

Pasul șase: Adunarea finală
Practic întreaga structură a carcasei este ținută cu încuietori de montare. Maestrul folosește doar adeziv cu topire la cald pentru a monta motoarele.


Totul este gata și poți testa.



