În noaptea de vineri următoare, autorul a vrut să strângă ceva interesant. Amintind că, a văzut proiectele de desenare a roboților și având un servo de rotație continuă, s-a decis să asambleze un astfel de robot. Un servomotor de rotație continuă poate fi realizat din obișnuit.
materiale:
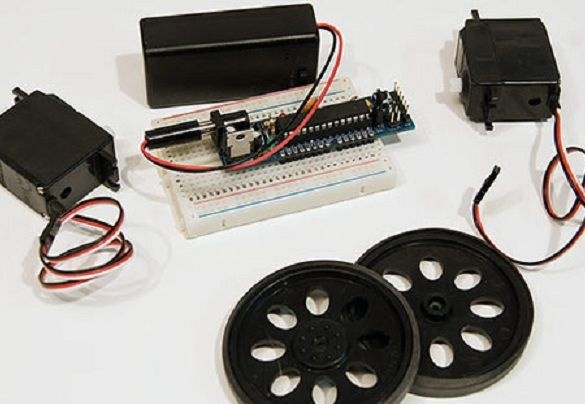
- DC Boarduino (aceasta este o clonă Arduino)
- Servo rotație continuă din 2 bucăți
- Roți servo 2 buc
- panou
- Conector baterie 9V cu mufa si comutator de 2,1 mm
- conectarea firelor
Nu este necesar să folosiți Boarduino în acest proiect, orice bord Arduino este suficient. Autorul a ales acest tablou datorită dimensiunii sale. De asemenea, veți avea nevoie de un anumit număr de markeri, puteți achiziționa un set de culori diferite pentru acest robot.
În plus, aveți nevoie de o baterie de 9V și de baza pentru corpul robotului de desen.
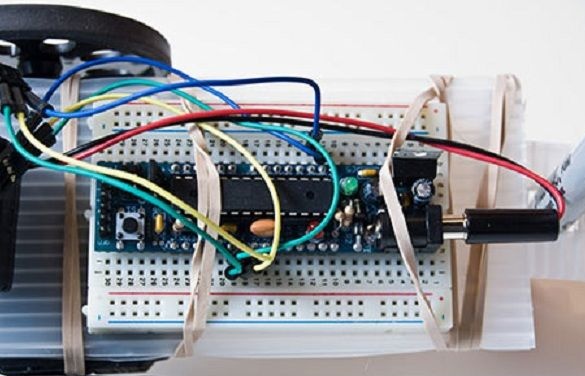
Nu este nimic complicat în asamblarea robotului. În primul rând, autorul fixează roțile cu două servos cu bandă adezivă și a măsurat distanța dintre roți. Este necesar ca lățimea bazei să fie puțin mai mică decât distanța dintre roți. Autorul folosește plastic ondulat, deoarece este destul de ușor și durabil și nu este dificil să lucreze cu acesta. Utilizarea sa, desigur, nu este esențială, puteți folosi chiar și carton sau plastic din carcase pentru discuri.
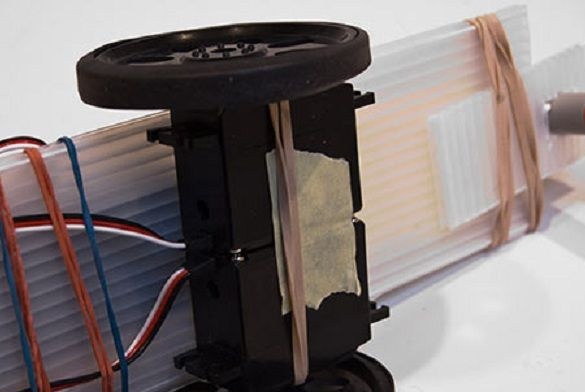
Servomotoarele erau conectate la bază cu benzi de cauciuc. La plasarea bateriei și a plăcii de panou, au apărut dificultăți, deoarece a fost necesar să se mențină un echilibru. Autorul a vrut să facă mai mult spațiu în partea cu care a fost plasat marcatorul, dar nu a dorit să profite de partea opusă. Cu ajutorul benzilor de cauciuc, este destul de simplu să ajustați locația componentelor, determinând optimul.
Pe tot parcursul proiectului, firele cu ace BLS sunt folosite pentru a se conecta la placa de bord, servomotoarele sunt de asemenea conectate cu ele.
Când autorul a terminat toate lucrările la asamblarea robotului, a vrut imediat să verifice performanța acestuia. A fost nevoie de ceva timp pentru a căuta codul. După ce s-a poticnit cu un articol despre controlul servo de rotire continuă Parallax folosind Arduino, și-a dat seama că era pe drumul cel bun. Codul a fost simplificat pe cât posibil, momentan Drawbot poate merge doar în cercuri.Desigur, acest lucru este primitiv, dar este, de asemenea, un început excelent și baza pentru dezvoltare și modernizare. Codul poate fi descărcat în articol.
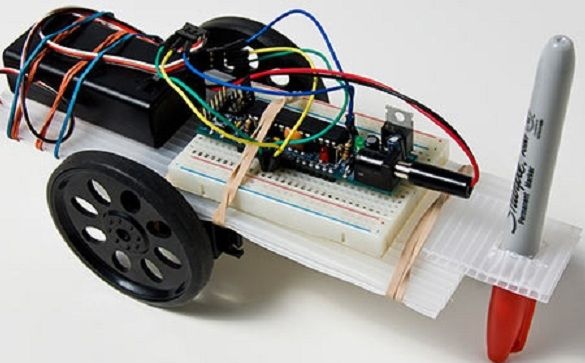
Acum, autorul a primit un robot care călătorește în cerc. Continuând lucrarea, autorul a luat resturile de plastic ondulat și a făcut o gaură în ea cu ajutorul unui cuțit. Gaura a fost tăiată cu un diametru puțin mai mic decât cel necesar, datorită găurii reduse, marcajul din el era perfect atașat. Dacă utilizați carton, atunci acest efect nu va fi, iar markerul nu va ține bine sau va cădea.

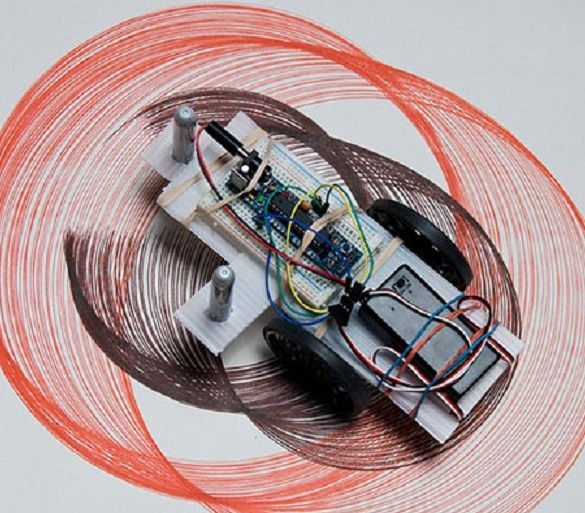
După instalarea markerului, este timpul să testați robotul. Punându-l în centrul foii 24x18 și pornind-o, autorul a văzut în sfârșit Drawbot în acțiune. A început să învârtă cercuri de desen. Putem spune că autorul a reușit să creeze un robot care să creeze un fel de operă de artă.
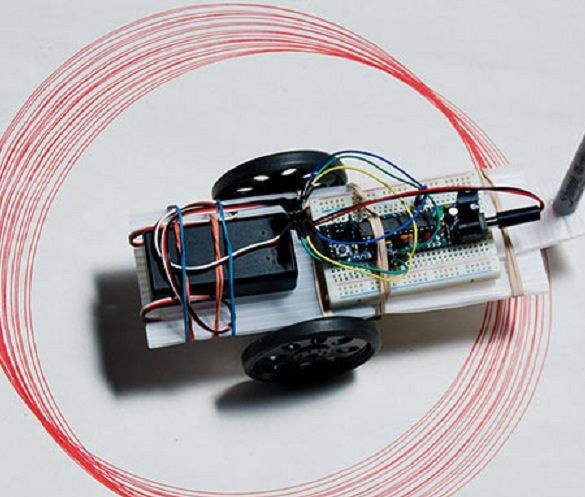
Imaginea a ieșit puțin penibilă din cauza foii întinse pe podea și nu a fost chiar echitabilă și, cel mai probabil, servosele nu s-au rotit sincron. S-a dovedit că un cerc poate fi mai jos, al doilea mai mare, iar următorul încă ceva mai sus sau mai jos. Probabil, într-o locație ideală, toate cercurile ar fi aliniate într-o singură linie. Ar părea mai frumos în aparență.
Autorul a crezut că cel de-al doilea marker poate să lumineze situația și robotul va face poze mai interesante. Rezultatul a fost bun, cercurile au început să se intersecteze între ele. Va fi mai interesant să vezi cum se comportă Drawbot pe o foaie mare de hârtie.
Eliberând robotul pe o suprafață de hârtie, autorul poate obține un cerc sau o grămadă de cercuri. Dar având un robot gata pregătit, vă puteți gândi deja la îmbunătățirea acestuia prin schimbarea codului.