


Bună după-amiaza, astăzi vreau să împărtășesc instrucțiunile cu privire la realizarea unui rezervor. Există două opțiuni pentru controlerul intern: ESP -8266 și Arduino Pro Mini. În prima versiune, controlul se realizează prin intermediul comunicațiilor Wi-Fi. În a doua - telecomanda IR. Este fabricat pe baza modelului TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), este condus de un set de cutii de viteze cu motor dublu Tamiya 70097 și de motoarele care vin cu cutia de viteze.
Vom avea nevoie de:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- adeziv model (ciment TAMIYA, de exemplu)
- Set de cutii de viteze cu motor dublu Tamiya 70097
- ESP 8266 -12E sau Arduino Pro Mini 8MHz 3.3V
- stabilizator de tensiune AMS 1117 3.3v 8000mA (dacă este opțional cu ESP 8266-12E)
- Sofer motor Qifei L9110
- condensator 10v 1000uF
- LED în două culori (roșu, verde)
- LED albastru
- 2 LED-uri roșii
- Receptor IR
- fotorezistor
- 2 compartimente pentru 2 baterii AAA sau 4 baterii AAA 1.2V 1000mA NI-MN
- 2 rezistențe 2ohm
- 4 rezistențe 75 ohmi
- 6 rezistențe de 10 kOhm (dacă este opțional cu ESP 8266-12E)
- buton
- fotorezistor
- USB - TTL
- fier de lipit
- fire multi-colorate
Pasul 1 Carcasă și mecanică.
Mai întâi trebuie să colectați modelul TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Lipim partea inferioară conform instrucțiunilor, cu excepția pieselor care acoperă orificiile de ieșire pentru arborele cutiei de viteze. De asemenea, stelele conducătoare nu se lipesc. Lipiți partea superioară conform instrucțiunilor fără modificări. După ce ați lipit toate acestea, lăsați să se usuce și continuați la colectarea cutiei de viteze. După cum se poate observa din instrucțiunile Tamiya 70097 poate fi asamblat în două versiuni diferite.
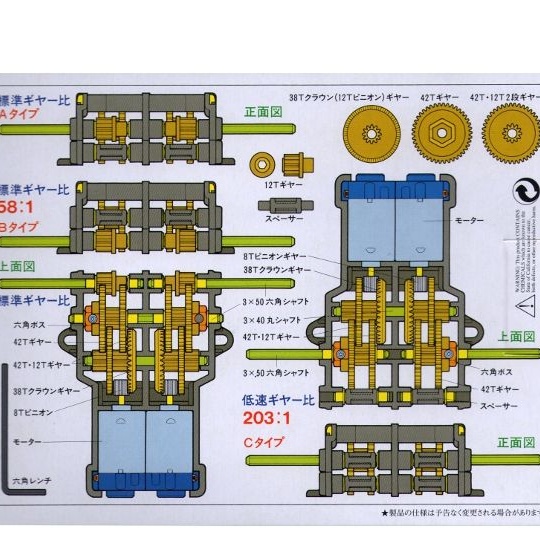
Prima opțiune cu un raport de viteză de 58: 1, a doua - 203: 1. Avem nevoie de prima opțiune. Și și aici, nu este atât de simplu. În acest caz, ieșirea axei poate fi mai aproape de partea inferioară a cutiei de viteze sau de mijloc. Exhalarea axelor trebuie făcută în gaura din mijloc! După ce am montat cutia de viteze, procedăm la instalarea ei pe model. În teorie, totul ar trebui să fie simplu, deoarece atât modelul cât și cutia de viteze a unei firme. În practică - cutia de viteze trebuia împinsă acolo. În poziția orizontală a cutiei de viteze, axele roților de antrenare s-au bombat în sus, așa că a trebuit să tăiem o placă metalică, ceea ce a făcut posibilă fixarea cutiei de viteze în poziția dorită.

Axele cutiei de viteze trebuie să fie tăiate cu 3 mm. Apoi lipici roțile de antrenare pe ele.

În partea superioară, mai aproape de spate, facem găuri pentru un LED în două culori și un receptor IR.

Mai aproape de față este o gaură pentru un LED albastru care va servi ca lanternă.

Și în interiorul trapei - pentru un fotorezistor.

Pe partea din spate, lipici LED-urile roșii pentru iluminare.

La toate cele de mai sus, trebuie să lipiți firele. Este mai convenabil să faceți acest lucru înainte de instalare.
Pasul 2 Electrician
Aici voi oferi o gamă de opțiuni pentru asamblare ulterioară.
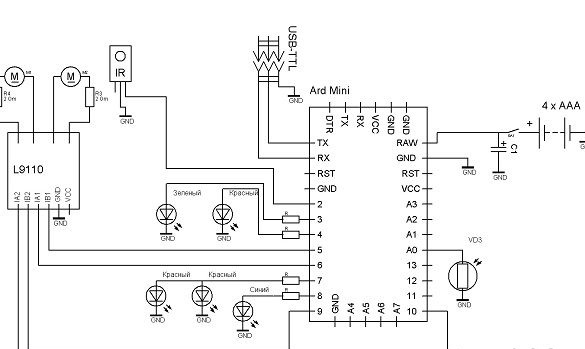
Dacă ați ales ESP 8266. Modulul Wi-Fi încorporat facilitează foarte mult procesul de control și conexiune.Poate fi programat cu ușurință în IDE Arduino. Cel mai bine este să alegeți un modul cu 4 Mb de memorie. În acest caz, este necesar să colectați hamul minim pentru a porni și a blițul ESP-8266. Doar pinul VCC este conectat direct la sursa de alimentare, pinii rămași: CH_PD, RESET, GPIO0, GPIO2, trebuie trași la sursa de alimentare (VCC) printr-un rezistor. Rezistențele de 10kOm pot fi înlocuite cu altele, de la 4,7kOm la 50kOm, cu excepția GPIO15 - valoarea sa trebuie să fie de până la 10k. În mod direct, la minus (GND) al sursei de alimentare, conectăm doar GND și, de asemenea, tragem GPIOO prin rezistor la 10kOm, pentru a pune modulul în modul de descărcare de firmware, la GND. Butonul este necesar pentru repornirea și intermiterea modulului. Conector USB-TTL - pentru firmware.
Iată o diagramă
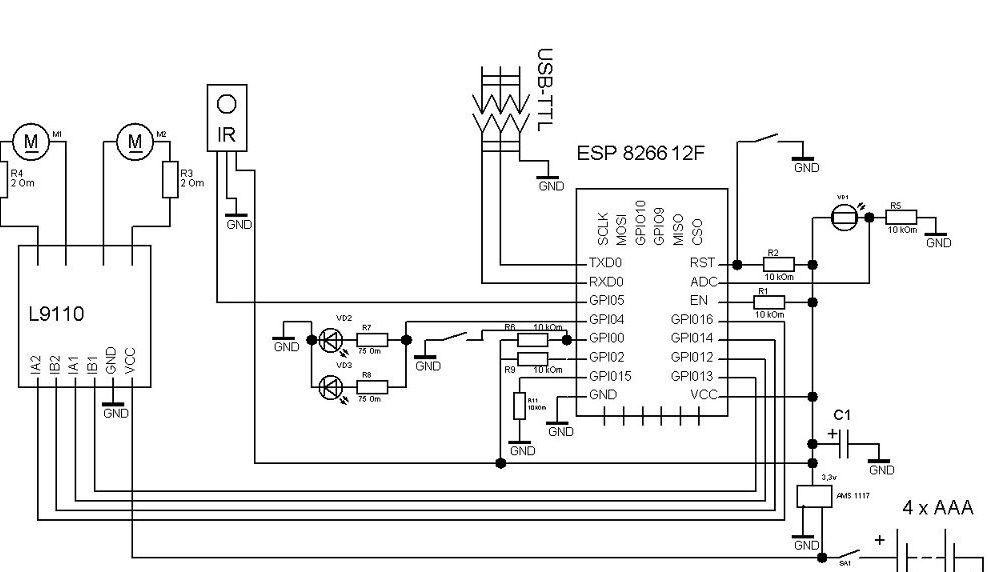
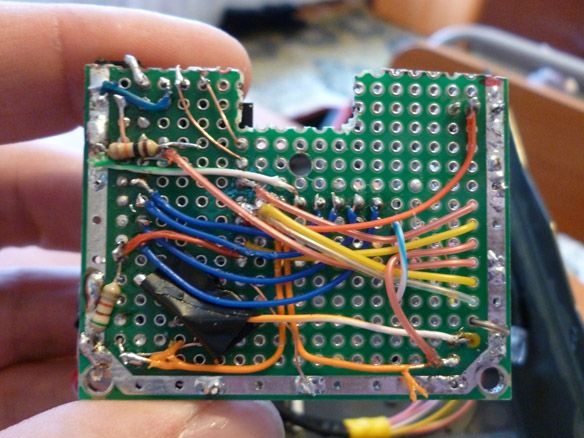
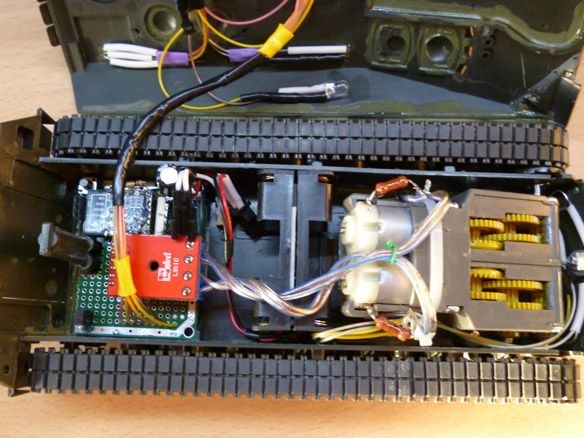
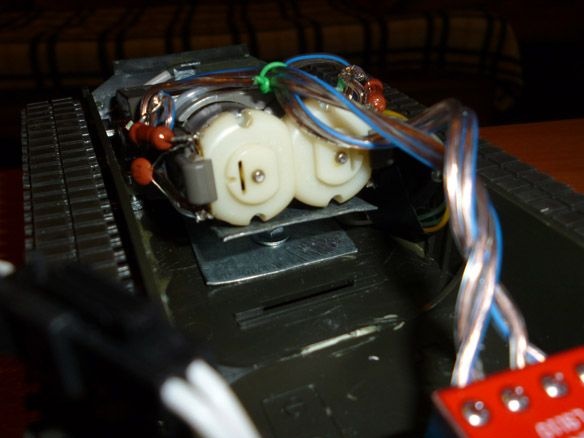
Voi explica puțin, este nevoie de LED-uri albastre și două roșii pentru iluminare din spate (este vizibil și frumos în întuneric), fotorezistorul este conectat la ADC-ul controlerului și este necesar pentru a determina iluminarea (când lumina de fundal se întunecă). Rezistențe de tracțiune de 10 kOhm, 75 Ohm pentru LED-uri, 2 Ohm-limitare a curentului pentru motoare (fără ca acestea, atunci când încercați să vă deplasați, regulatorul supraîncărcat). Am sudat totul în funcție de circuitul de pe placa de circuit. Pentru alimentarea cu energie, puteți utiliza 4 baterii „mici” sau patru baterii de dimensiuni AAA, soldate în serie. Lipim două compartimente a două baterii cu bandă dublă față și conectăm în serie. Atât compartimentele bateriei, cât și acumulatorii sunt plasate între cutia de viteze și placa de circuit.

Dacă alegerea ta a căzut pe Arduino. Numai Arduino Pro MINI se potrivește în interior. Merită să alegeți o placă de 3,3 volți, deoarece motoarele sunt proiectate pentru 3 volți și nu doriți să alimentați separat motoarele și Arduino. Arduino este mai ușor. Întregul cablaj al regulatorului și regulatorul de tensiune sunt deja pe placa în sine. Rămâne să dezvăluiți priza Arduino și șoferul motorului de pe placa de circuit.

Pasul 3 Pregătirea mediului de programare.
Pentru a edita firmware-ul și a completa schița în ESP, trebuie să instalați ID-ul Arduino de pe site-ul oficial al Arduino.cc, precum și să instalați suplimentul pentru ESP, prin intermediul Boards Manager. Pentru a face acest lucru, porniți ID-ul Arduino, apoi Fișier - Setări - în câmpul Adrese de borduri suplimentare Adresa URL, introduceți linkul
http://arduino.esp8266.com/package_esp8266com_index.jsonfaceți clic pe OK (puteți introduce mai multe linkuri separate printr-o virgulă în acest câmp). Următoarele instrumente - Board - Boards Manager, introduceți esp8266 în câmpul de filtrare și faceți clic pe ESP8266 de ESP8266 Forum comunitar. Faceți clic pe Instalare și așteptați finalizarea descărcării. Acum rămâne să selectați placa - Generic ESP8266 din meniul Instrumente și să setați frecvența modulului dvs. la 80 sau 160 MHz, dimensiunea memoriei flash și să selectați portul serial la care este conectat adaptorul USB-TTL.
Pentru Arduino, trebuie doar să instalați ID-ul Arduino de pe site-ul oficial Arduino.cc.
Pasul 4 Firmware
Rămâne să editați schița și să o completați cu ESP.
În câmpul "String _ssid =" ";" între ghilimele indică ce punct de acces doriți să vă conectați.
"String _password =" ";" este parola pentru această rețea.
"String _ssidAP =" Mardella ";" numele rețelei pe care ESP o va ridica dacă nu se conectează la cea existentă.
"String _passwordAP =" 12345678 ";" - parola rețelei pe care ESP o va ridica dacă nu se conectează la cea existentă.
"String SSDP_Name =" Mardella ";" Numele SSDP
După pornire, ESP încearcă să se conecteze la punctul de acces specificat în schiță, dacă are succes, trebuie să determinați adresa IP a robotului nostru și să vă conectați la această adresă printr-un browser. De asemenea, puteți parcurge un computer la infrastructura de rețea, găsiți rezervorul nostru acolo și faceți dublu clic pentru a vă conecta la acesta. Dacă conexiunea nu reușește, ESP devine punctul de acces. Apoi, accesul poate fi obținut prin conectarea la un nou punct de acces și prin introducerea 192.168.1.1 în browser.
Interfața web este formată din două pagini. Primul care a controlat. Al doilea este pentru personalizare. În a doua pagină, puteți specifica punctul de acces la care doriți să vă conectați, precum și numele rezervorului și numele și parola punctului de acces pe care ESP îl ridică. Toate modificările au efect după o repornire. De asemenea, puteți reporni modulul prin interfața web.
Pentru Arduino, trebuie să editați toate câmpurile „results.value”. După ce ați notat codurile IR ale telecomenzii pe care le veți folosi acolo.

Tanchika video: